
无缆化工管道机器人的研究进展
2013-09-04 05:45王越勇栾江峰
当代化工 2013年1期
王越勇,栾江峰
(辽宁石油化工大学, 辽宁 抚顺 113001)
随着我国经济的发展,我国的化工管道已经普及到我国社会主义建设的各行各业,并且发挥着极其重要的地位。为提高管道的寿命、防止泄漏等事故的发生,必须定期对其进行检修。化工管道机器人由于它的准确、高效和经济性慢慢发展起来。管道机器人的能源供给方式有两种:有缆方式或无缆方式[1-3]。无缆检测机器人主要分为蓄电池式、差压式和充电式。有缆化工管道机器人当检测机行走距离达到一定程度时,尤其转弯较多时,缆线与管壁的摩擦力会逐渐变大,因此这种检测机不能长距离检测[4]。而蓄电池由于受体积限制所储存的能量有限,同时还受电池质量、充电工艺等因素的影响,因而使化工管道机器人的行走距离受到限制[3。差压式的化工管道机器人难以控制,速度不稳,受流体的干扰大[5]。而充电式的管道机器人由于有源源不断的能量补充,并且调速、越障性能都很好,所以无缆的充电式的化工管道机器人更符合实际应用。
1 国内无缆管道机器人的研究进展
1.1 外磁场驱动无缆化工管道机器人
2003年大连理工大学张永顺副教授研制了一种微型管道机器人[6],这种管道机器人以超磁致伸缩合金为驱动器。从而实现了以管外的磁场能量来使微型管道机器人行走,属于无缆驱动,并且提高了其使用的可靠性,实用性也非常良好。控制原理是通过管外时变振荡磁场频率的改变,媒介于机器人磁致伸缩微驱动器的磁机耦合作用,将时变振荡磁场能转换成机器人弹性腿的振动机械能从而实现机器人的行走。机器人系统结构如图1所示。
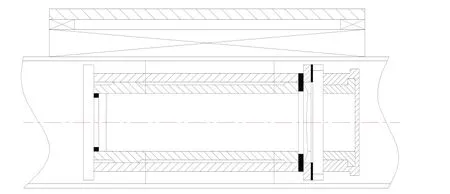
图1 外磁场驱动机器人整体结构Fig. 1 The structure of Extracorporeal magnetic driving robot
磁场最强的地方是激励线圈的轴心线处,来自电磁控制器的具有一定频率的波型电压会通过电流负反馈功放模块,并且会在线圈中产生具有同样频率的时变振荡磁场,这种震荡磁场会被机器人驱动器用来进行磁一机耦合作用,这样就会使振荡磁场的能量转换为直线的振动能量,这种直线的振动能量会被机器人上的微位移放大机构传到机器人的弹性腿上,这样弹性腿就有能量相对管壁来振动,靠着与管壁间的摩擦力就可以使机器人行走。
1.2 微波供能无缆化工管道机器人
上海大学研制出了一种以无线微波供能的新型无缆管道机器人[7]。它包括微波激励装置和微波接收装置。这种管道机器人的运动原理是采用了波导传输的原理,在管道使微波可以进行TE11单模传输,并且使在金属管道之中传输的微波的极化功能和传输功能的稳定性有了极大的提高,从而充分的利用了微波的能量,微波能量由管道中的微机器人供能单元一整流天线接收并转换成直流电。管道机器人的微波供能系统如图2所示。无线的微波能量会被微波激励装置耦合进入管道之中,管道是起到了传输波导的作用,作业中的管道机器人中会带有无线的微波接收装置,就是整流天线,机器人会利用这个装置将接收到的微波能量转换成直流电源,为机器人的的运动提供动力源。

图2 微波管道机器人供能系统Fig. 2 The energy supply system of pipeline robot
图3 是微波激励装置示意图。微波固态源产生毫瓦级的小功率微波信号,经功率放大,放大到瓦级功率电平,再经过定向耦合器、波导一同轴转换器、矩.圆波导过渡器和过渡头与不锈钢管道相接,此处我们所用的是内径为20 mm的不锈钢管。管道机器人在运行的过程中微波的功率都是不稳定的,变化很大,所以我们在机器人的功率放大器上加了个电控衰减器,使其功率趋于相对稳定,机器人在管道运行时要有一定的运行速度和距离,所以功率放大器的增益要根据机器人的运行状况,并要与之相匹配,这样机器人在运行过程中接受到的微波功率就会趋于稳定,那么机器人的运行就会稳定。
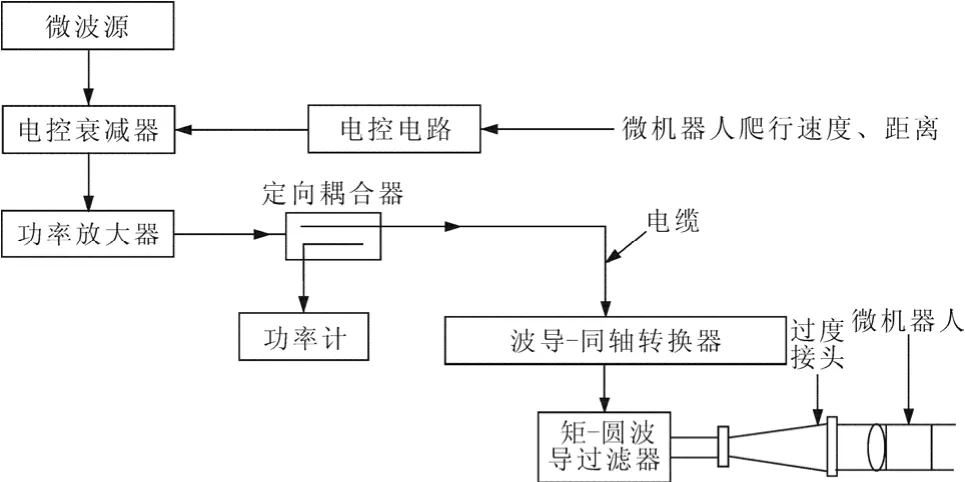
图3 微波机器人激励装置图Fig. 3 The promote device of microwave robot
1.3 新型无缆化工管道机器人
广东工业大学杨宜民教授等提出了一种新型的可充电式的管道机器人[8]。如图4这种机器人检测距离非常长,新型能源自给式管道机器人是无缆管道机器人,并且可以在管道中进行能源补充,从而增加工作距离。并且管道机器人可以在需要的时候进行速度调节,在弯管等处进行减速转向达到良好的通过性能。
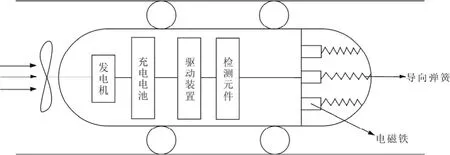
图4 新型无缆管道机器人模型Fig. 4 The model of cable-less piping robot
由图4可知,机器人的迎流方向有叶轮,叶轮一方面在流体的作用下产生压力,推着机器人向前运动,另一方面,叶轮也在自转,在发动机的作用下将流体的动能转化成电能,在蓄电池中储存下来,为机器人其他的运动环节提供能量。机器人的速度调节主要是在运动轮上多加了电磁圈和衔铁,当机器人需要降速时,对电磁圈进行充电,那么衔铁被带磁性的电磁圈吸下来,从而增加了运动轮与壁面的摩擦,实现了降速;当不需要降速时,就不在对电磁圈充电,衔铁被弹簧拉走,速度回归正常。机器人的换向是由导向头部来完成,头部有三块电磁铁和三个支撑杆,当需要换向时,电磁铁中的一个或是两个进行充电,使三个支撑杆被带电的磁铁吸引,从而达到换向的功能,三个电磁铁可以实现六个方向的变换,如果需要的话,还可以增加电磁铁,实现更多方向的变换。
2 国外无缆管道机器人的研究进展
2.1 美国EXPLORER无缆化工管道机器人
2001年在美国国家航空和宇宙航行局(NASA)的资助下,美国的纽约煤气集团公司(NYGAS)的DPahne D’Zurko和卡内基梅隆大学机器人技术学院的 HagneSchempf博士一起研制出来了用于长距离的,并且是无缆方式的管道机器人,名字叫EXPLORRE管道机器人[9]。其主要应用于检查地下的煤气管道的安全状况,其结构示意图如图5所示。

图5 美国EXPLORRE管道机器人Fig. 5 The pipeline robot of America EXPLORRE
该管道机器人EXPLORER的特征如下:
(1) 机器人采用无缆方式,自带电池,并且电池在工作时可以反复充电,由于有充足的能源,所以检测距离很长,而且机器人自推进能力很好;
(2) 在高低压的情况下都可以工作,在铸铁和钢质材料的煤气管道中也可以;
(3) 机器人的检查设备是嵌入式的“鱼眼”镜头,使结构很紧密;
(4) 能够通过垂直管道,并且在90°的弯管接头中也能顺利通过;
(5) 机器人与技术人员的连接是无线的通讯方式。
2.2 日本紫外光供能无缆管道机器人
日本Nagoya大学Fukuda等研制出来了用紫外光来提供运动能量的移动微机器人[10],这种机器人是悬浮起来的。它的下基座的面积大小为80 mm×80 mm ,上平板的体积大小为15 mm×15 mm×2 mm,机器人的运动过程如图6所示。首先在空气压力的作用下,上平板会慢慢的升起,悬浮在空中,然后紫外线会光照到焦热电单元上,这样就会产生一定的电压,此电压会在下基座和上平板组成的电极平面之间形成一定的静电力,这样上平板就会在静电力的作用下在水平方向运动。
3 无缆管道机器人的常见问题
3.1 定位
我们常用的管道检测机器人的定位问题一般是
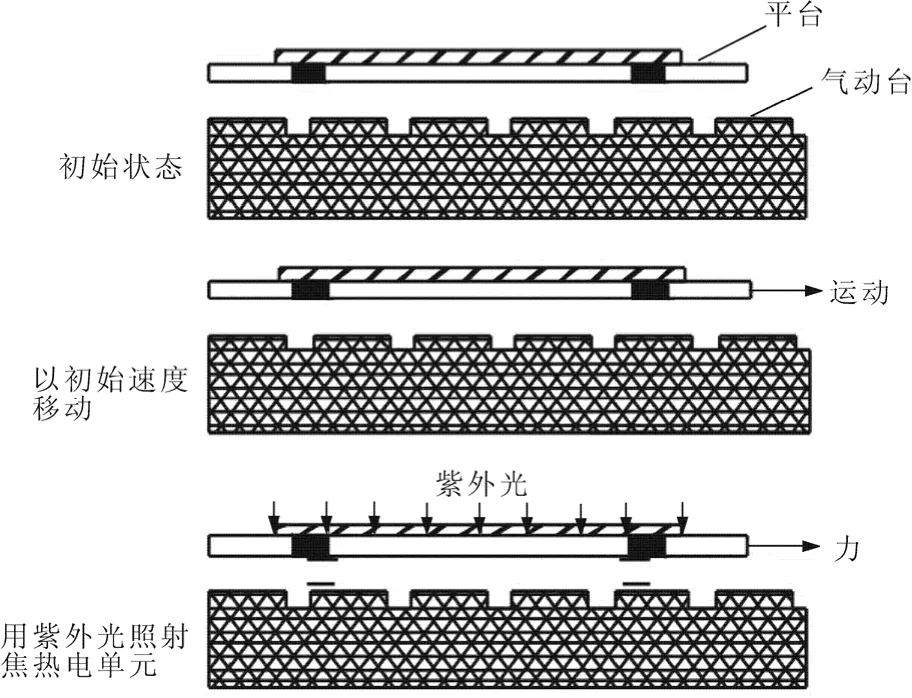
图6 紫外光悬浮微机器人操作过程Fig.6 The operating of ultraviolet suspension micro-robot
在里程轮上安装光电码盘从而使其构成了一个闭环控制系统进一步实现机器人的定位,但是机器人常常在一些工况环境非常复杂的地方工作,使用光电码盘的测速法,会由于管道内壁的油污和石蜡等造成光电码盘打滑而具有天生的缺陷,很难达到要求。
3.2 越障性能
由于管道的工作要求,管道往往不是单一的直管,并且存在着大量的阀门、弯管、三通结构、排水管道中可能会存在一些沉积物或者内壁缺陷造成了机器人行进的障碍[11]。检测机器人在进行检测的过程中必须有能力克服这些障碍,能够顺利的通过才能完成整体的检测任务,无缆机器人由于它有源源不断的能量来源,并且有相匹配的驱动和制动机构,它的越障性能已经有很大的改善,但是有些较长的机器人在“T”型管道中的通过性能并不是很强,比如前面所说的美国EXPLORER无缆管道机器人,所以这方面还有待需要优化。
3.3 通讯性能
管道机器人在对管道进行检测时需要及时的和外界工作系统进行联系,能够使工作人员认清机器人所在的位置和工作环境,并发出指令使机器人能够高效的完成工作。通讯问题主要分两种方式:一种是有缆的,另一种是无线的通讯方式。无缆管道机器人只能使用无缆的通讯方式,这种方式的信号会在各种介质中的传播中慢慢的被弱化,尤其是在金属管壁中工作时,电磁的屏蔽作用会使信号难以传递出去。所以如何准确的传递讯息是无缆机器人研究的重要问题。
3.4 管径的自适应性
现有的管道机器人往往只能在单一管径的管道中工作,但是现有的工作管道中,通常都是有变径的,如果机器人再这种管道下没有适当的进行变径工作,那么管道机器人的工作空间会受到极大的限制。比如前边提到的新型无缆管道机器人只适应单一管径的管道。在不同直径的管道中能张开或收缩机器人的外径尺寸,使机器人能在各种直径的管道中行走作业[12]。所以管道机器人需要能够有一定的自适应性能,使它可以在一定范围的管径下进行工作,可以自如的改变自身的尺寸以达到工作要求。
4 结 论
化工管道机器人的无缆的供能方式已是机器人的一个非常重要的发展方向。由于可以将化工管道内的流体、外磁场、微波、紫外线等等外界能量转化为化工管道机器人的机械能,所以使机器人的无缆供能成为可能。但是无缆化工管道机器人目前由于技术的限制还存在大量的问题,所以无缆化工管道机器人只是处在理论的可行层面,正在进行试验阶段的研究和探索,还并没有广泛应用。要在上面几个重大的问题上取得关键性的技术突破,无缆管道机器人的实际应用才能成为现实。
[1] 钟映春,杨宜民.新型无缆管道机器人的研究[J].机械工程师,2004(8):3-5.
[2] 杨宜民,黄明伟.能源自给式管道机器人的机械结构设计[J].机器人 ROBOT,2006(3):326-330.
[3] 李锻能,杨宜民,罗传林.新型无缆管道机器人运动机构的设计[J].机床与液压,2005(6):7-9.
[4] 朱玉芳,施祖康.智能管道检测机器人[J].机械制造,2003(3):13-14.
[5] 姜玉泉,李著信,易方,宋志强,闫育京.金属磁记忆管道检测机器人的应用研究[J].后勤工程学院学报,2010(1):47-50.
[6] 张永顺,贾振元,丁凡,王福吉,郭东明.外磁场驱动无缆微型机器人行走特性的分析[J].机械工程学报,2003(6):135-139.
[7] 徐君书.管道探测无缆微机器人微波供能系统[J].机械工程学报,2006(3): 62-69.
[8] 钟映春,杨宜民.新型能源自给式管道机器人的原理设计与研究[J].机床与液压,2006(7):5-6.
[9] 王殿君,李润平,黄光明.管道机器人的研究进展[J] .机床与液压,2008(4):185-187.
[10] HATTORIS, FUKUDAT, NAGAMORI S. A Study on optical piezo-electric actuator (Response experiments by U.V. beam and photo response model)[J].Jof Robotics & Mechatronics,1992,4(4):321-329.
[11] 于志伟,郝静如.排水管道检测机器人机构设计及性能分析[J].中国设备工程,2008(5):34-36.
[12]张云伟,颜国正,丁国清,徐小云.煤气管道机器人管径适应调整机构分析[J].上海交通大学学报,2005 (6):950-954.
猜你喜欢
化工管理(2022年27期)2022-11-15
化工管理(2022年30期)2022-11-15
化工管理(2022年15期)2022-11-15
小学科学(学生版)(2020年1期)2020-01-19
红领巾·探索(2018年12期)2018-01-26
电子制作(2017年13期)2017-12-15
中华诗词(2017年4期)2017-11-10
金色年华(2017年12期)2017-07-18
都市丽人(2015年2期)2015-03-20
应用化工(2014年12期)2014-08-16
