
基于LS-DYNA正面台车试验的有限元仿真
2013-09-04 05:07:02王玉超亓向翠杨荣山
汽车技术 2013年7期
王玉超 亓向翠 杨荣山 许 妮
(广州汽车集团股份有限公司汽车工程研究院)
1 前言
目前,对正面台车的仿真主要采用多体动力学Madymo软件[1,2]。 Madymo软件建模简单,计算效率高,但其中座椅刚度、地板刚度和IP刚度等输入参数必须通过试验才能得到。为克服Madymo软件台车建模的缺点,本文利用LS-DYNA软件建立了台车有限元模型,参照台车试验中假人的运动姿态进行了相关性分析,通过对比仿真与试验的C-NCAP假人评分部位的曲线和运动姿态,表明在LS-DYNA环境下建立的台车有限元模型能够真实地反映试验状态,为乘员约束系统的优化奠定了基础。
2 有限元仿真模型
乘员约束系统的台车有限元模型如图1所示。该模型包括部分乘员舱白车身、转向管柱和转向盘、座椅、仪表板、假人、气囊和安全带等共326260个单元,其中壳单元193087个,实体单元131173个,一维单元700个。
2.1 车体结构
为减少运算时间,在y=0处截取1/2车身结构,只保留影响假人姿态的结构零件(如地板、前围、加速踏板等),并将座椅后部的地板设置为刚体,用来输入台车碰撞的加速度曲线。为使台车运行稳定,刚体地板一直延伸到前围。仪表板只保留了影响假人伤害值的零件,删去了空调风道、仪表盘、雨刮盖板等。因风挡玻璃几乎不变形,所以设为刚体。地毯和搁脚板采用实体单元模拟,采用*MAT_FU_CHANG_FOAM材料模型,赋予泡沫属性。
2.2 转向管柱和转向盘
采用球铰或万向铰模拟万向节;采用圆柱铰模拟下转向管柱的运动关系;采用移动铰和弹簧单元模拟上转向管柱的压溃。模拟示意如图2所示。
上转向管柱的弹簧主要用于模拟转向管柱在碰撞过程中的压溃力,输入试验的压溃曲线,如图3所示。特别注意,在关键字*ELEMENT_DISCRETE中,S项的含义为scale factor on forces,必须设置为1.0。转向盘通过展开的气囊间接与假人胸部接触,对假人胸部的伤害影响较敏感,尽管在台车试验中转向盘变形微小,也不能以刚体处理,应该赋予真实的材料。
2.3 座椅
座椅分为3层,上层为shell单元,设置与假人接触;中层为泡沫实体单元;下层为shell单元,当假人压缩座椅时起支撑作用。在primer软件中,采用seatsquash命令模拟假人压缩座椅的过程,能够将假人的H点压到正确位置,达到与试验假人较一致的姿态。为缩短运算时间,删去了座椅后背,如图4所示。为了在运算过程中不出现负体积,座椅的泡沫实体单元采用四面体。
2.4 假人
采用 FTSS (First Technology Safety Systems)公司的HybridⅢ50th男性假人,它适用于100%全正面碰撞和40%偏置碰撞,装备有头部加速度计、胸部加速度计、骨盆加速度计、颈部上部力计、颈部下部力计、胸部脊骨力计、腰部脊骨力计、大腿骨力计、膝关节力计、小腿上胫骨力计、小腿下胫骨力计、胸部位移传感器和膝盖位移传感器,与试验假人具有良好的仿真度。
假人定位按照试验假人的定位要求,其定位参数见表1。

表1 假人定位参数
2.5 气囊
气囊在展开过程中最容易出现程序崩溃,所以应做到以下几点:
a.气囊应采用*AIRBAG_WANG_NEFSKE_JETTING模拟,因其具有气体温度、气体质量流、排气孔面积等输入项,能够较好地反映气囊的试验性能。其中JETTING能够定义气流方向,且可有效展开气囊。*AIRBAG_WANG_NEFSKE_JETTING必须配以*AIRBAG_REFERENCE_GEOMETRY才能正常模拟气囊展开过程。
b.气囊在未展开前并没有变形,所以必须设置*DEFORMABLE_TO_RIGID_AUTOMATIC中的D2R项将气囊处理成刚体;达到气囊点火时刻后,设置*DEFORMABLE_TO_RIGID_AUTOMATIC中的R2D项再将气囊处理成变形体。
c.将气囊自身接触的摩擦因数以及气囊与气囊盒接触的摩擦因数均设置为0。
2.6 安全带
安全带采用一维和二维单元混合建模,其中与假人接触的部分采用二维单元,不接触部分采用一维单元。因有的安全带有预紧功能,因此肩带的一维单元总长度大于安全带的预紧长度,以避免二维单元滑入滑环时程序崩溃。
安全带一维单元模型采用*MAT_SEATBELT关键字模拟,其中的LMIN(最小长度)项需要设置,推荐值为单元长度的1/10;LLCID (织带的加载曲线)项和ULCID(织带的卸载曲线)项需要从安全带的拉伸试验中获得。某安全带织物刚度的加载和卸载的力-应变曲线见图5。
安全带二维单元模型采用*MAT_ELASTIC或*MAT_FABRIC模拟,需要输入弹性模量、密度和泊松比。
2.7 卷收器
采用*ELEMENT_SEATBELT_RETRACTOR模拟卷收器,并输入力与位移关系的加载和卸载曲线,如图6所示。其中,加载曲线的初始拉力应大于零;卸载曲线的初始拉力应等于零,且单调上升。
2.8 预紧器
采用*ELEMENT_SEATBELT_PRETENSIONER模拟预紧器,LS-DYNA提供了7种类型的预紧器,每种类型的预紧器都有不同的使用条件,应按照已知条件选择合适的预紧器。如某预紧器已知的限力值为1800 N,因此采用力—时间预紧器模拟预紧过程。
2.9 边界条件
在台车试验中,必须输入整车碰撞试验中B柱下端的x向加速度曲线。某B柱下端的加速度曲线如图7所示,采用*BOUNDARY_PRESCRIBED_MOTION将x向加速度曲线赋给刚体地板。
2.10 接触
在台车模型中需要定义以下接触:假人自身接触、假人与座椅接触、假人与安全带接触、假人与IP接触、假人与加速踏板和前围的接触、假人与气囊接触、气囊与转向盘与风挡玻璃的接触、气囊自身接触、结构自身接触、安全带带扣与座椅接触、安全带与座椅接触等。接触主要采用*AUTOMATIC_SURFACE_TO_SURFACE和*AUTOMATIC_SINGLE_SURFACE模拟,因为AUTOMATIC接触方式是从壳单元的两边进行接触检测,较适合各种复杂的接触行为[3]。
对假人伤害值和姿态较敏感的接触为假人手臂与仪表板、假人脚与加速踏板、假人脚与歇脚板、假人与座椅接触等。表2为经多次仿真后确定的各主要接触的摩擦因数。
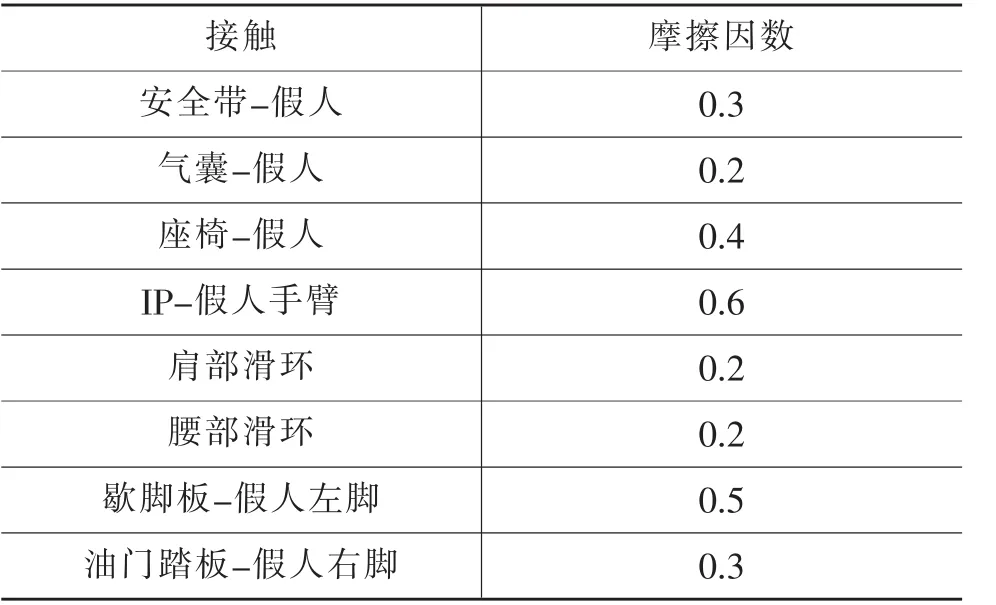
表2 各主要接触的摩擦因数
3 仿真与试验结果对比分析
3.1 假人C-NCAP评分部位的曲线对比
图8~图16为仿真与试验的假人C-NCAP评分部位的曲线对比。其中,头部合成加速度、髋部合成加速度及胸部伤害值的仿真值与试验值非常接近;颈部伤害值对比曲线的趋势较一致,误差较大,但远低于C-NCAP规定的高性能限值;大腿压缩力累积对比曲线较接近;左膝盖滑动位移的仿真值为0.1 mm,试验值为0.2 mm;右膝盖滑动位移的仿真值为0.07 mm,试验值为0,绝对值较小,且远低于CNCAP的高性能限值6 mm;小腿压缩力的对比曲线和TI值的对比曲线均较一致,其中,左小腿的误差控制在15%内,相关性较好,右小腿由于受到油门踏板的影响而使其运动具有不确定性,即使相同的台车试验误差也会较大;安全带力的对比曲线也较吻合。
表3为仿真与试验的假人C-NCAP得分对比结果。由表3可知,仿真值与试验值的误差为2%,较真实地反映了试验状态。

表3 仿真与试验的假人C-NCAP得分对比
3.2 假人的运动姿态对比
图17为试验和仿真中假人在不同时刻的姿态对比。从图17可看出,第56 ms时假人头部开始接触气囊;第76 ms时假人胸部加速度达到最大值;仿真假人与试验假人的运动姿态较一致。
4 结束语
以国产某车型的台车试验为基础,在LS-DYNA环境中建立了台车的有限元仿真模型,并以台车试验中假人评分部位的曲线和假人的运动姿态为目标,重点对转向管柱、气囊、安全带、预紧器、卷收器的建模关键技术以及接触摩擦因数的设置进行了研究。通过大量的台车模拟试验,假人C-NCAP评分部位的曲线误差控制在15%内,假人C-NCAP得分误差控制在2%内,证明了该台车有限元仿真模型能够真实有效地模拟台车试验。
1 曲洪亮,李德才,钱国强.基于MADYMO的乘员正面碰撞侧约束系统模型的建立.东北林业大学学报,2007,35(8):85~89.
2 王灿军,管迪.基于台车试验方法的某微型轿车乘员约束系统改进设计.汽车技术,2009(11):38~41.
3 赵海欧.LS-DYNA动力分析指南.北京:兵器工业出版社,2006.
猜你喜欢
山东冶金(2022年2期)2022-08-08 01:51:54
数学大王·低年级(2020年4期)2020-04-20 10:59:47
昆钢科技(2020年6期)2020-03-29 06:39:32
时代汽车(2020年23期)2020-03-03 17:51:10
中学生数理化·八年级物理人教版(2019年3期)2019-04-25 06:20:58
汽车技术(2017年7期)2017-08-08 03:01:48
疯狂英语·新读写(2017年1期)2017-04-06 03:52:31
小学生作文(低年级适用)(2017年12期)2017-02-06 01:24:09
汽车工程学报(2016年6期)2017-01-11 17:53:19
工业炉(2016年1期)2016-02-27 12:34:13
