三维激光扫描用于开采沉陷监测研究
2013-08-31 08:33胡大贺陈冉丽
采矿与岩层控制工程学报 2013年1期
胡大贺,吴 侃,陈冉丽
(1.中国矿业大学环境与测绘学院,江苏徐州221008;2.石家庄铁路职业技术学院,河北石家庄050041)
目前,常规的开采沉陷监测方法是在沉陷区布设观测站,利用全站仪、水准仪观测监测点的空间位置,以此分析沉陷区的移动变形情况。该方法具有观测站布设困难、工作量大、费用高、获取的数据量少、不能反映整体变形情况等缺点。
三维激光扫描是集成了多种高新技术的新型空间信息数据获取的手段与工具[1]。相较于传统测量技术,三维激光扫描测量技术无需合作目标,且具有快速、高精度、高密度等优点。本文针对三维激光扫描应用于开采沉陷监测,提出了获取沉陷区下沉盆地的数据处理方法,并对该方法所能达到的精度进行了理论分析,通过实例应用,得到了预期的结果。
1 数据采集
1.1 站点布设
开采沉陷波及范围一般较大,而扫描仪有效扫描距离有限,故需采用多次设站、分站扫描的方式来覆盖整个沉陷区。根据地形条件,合理布设站点位置,提高数据采集效率,在实际应用中具有重要意义。站点布设主要遵循2个原则:少设站,少重叠度;覆盖整个监测区域。
1.2 扫描测量
扫描站布设完毕后,对站点进行控制测量,获取站点高精度坐标。在各站点上采用360°全圆扫描方式,设站时输入站点坐标并后视定向,将各扫描站数据化归到统一大地坐标系中。
2 数据处理
2.1 基本原理
数字高程模型DEM是对地球表面地形地貌的一种离散的数字表达。相同区域不同时期DEM模型的变化即为该地区地表的变化。采煤前后地表DEM模型的差值即为该区域的沉陷盆地。三维激光扫描点云为DEM的建立提供了充足的原始数据,本文利用DEM建模方法提取下沉盆地。首先,以地下开采前后采集的扫描点云数据建立地表格网模型,在格网中进行高程内插,获取2期扫描相同平面位置的高程,并以此求取沉陷值,最终建立扫描区域下沉盆地DEM。
2.2 DEM建模
地形表面建模主要有4种方法:基于点的建模方法、基于三角形的建模方法、基于格网的建模方法、混合建模方法。基于三角形的建模方法能够保持原始数据的精度,有利于提高开采沉陷监测精度,本文选用此方法构建DEM。
空间相邻三点可生成一个平面三角形,并代表其覆盖的区域,则整个DEM表面可由一系列相互连接的相邻三角形组成,即构成不规则三角网(TIN),通常采用狄洛尼 (Delaunay)三角网构建表面模型,如图1。

图1 Delaunay三角网
2.3 高程内插
在DEM表面模型中采用插值方法获取任意位置的三维坐标(xi,yi,zi),由于实际地形的复杂性,DEM分块内插方法具有较实用的价值。本文采用基于TIN的双线性内插法,如图2。

图2 双线性内插法
根据3个已知参考点 (P1,P2,P3)内插P(xp,yp,zp)点高程的算法如式:
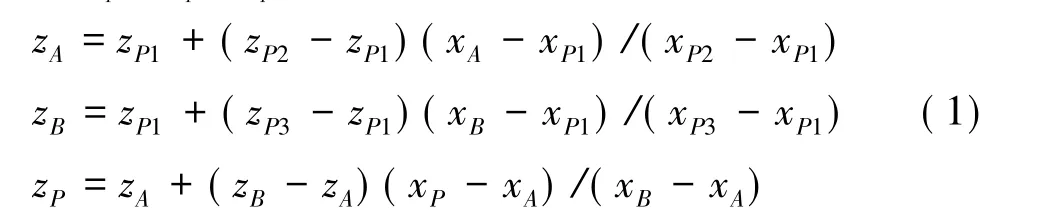
其中,yP=yA=yB,点A,B分别位于直线P1P2,P1P3上。
3 方法实现流程
采用现有扫描数据预处理软件和自主编程相结合的方式实现开采沉陷盆地的获取。
利用Real Works Survey Advanced软件对采集的原始数据进行去噪、重采样处理,以C语言编程,实现下沉盆地的求取。Q1,Q2为2期扫描数据集合,程序流程可概括如下:
(1)将Q1,Q2存入数组,采用逐点插入法建立2期扫描地表的不规则三角网 (TIN),将各三角形信息存入Delaunay链表。
(2)在 (1)所建TIN中以双线性内插法计算任意 (xi,yi)处高程,得到点集 Q'1{(xi,yi,zi1)} ,Q'2{(xi,yi,zi2)} 。
(3)Q'1-Q'2,即得下沉盆地数据集QΔ{(xi,yi,Δzi)} 。
(4) 利用QΔ{(xi,yi,Δzi)},建立下沉盆地DEM。
4 精度分析
4.1 DEM精度
DEM模型的误差来源主要为数据采集的误差和高程内插误差,其精度[6]如式 (2):

式中,σsurf为DEM精度;σnod为采集数据的误差;σ为高程内插误差。
4.1.1 数据采集误差
采集数据时,误差主要包括站点控制测量误差、设站定向误差、仪器本身误差。
(1)控制测量误差 采用全站仪、水准仪进行设站点的控制测量,为保证扫描数据的高程精度,水准测量应满足三等水准要求。
(2)设站定向误差 架设扫描仪时需对中整平,后视定向并量取仪器高,这个过程会产生误差,导致测量点精度降低,由此产生的误差大小主要取决于仪器操作者的操作技能。
(3)仪器本身误差 三维激光扫描仪具有一定的测距、测角精度,决定了测量点的精度。测距误差和测角误差统称为仪器误差,对测量点的精度影响如式 (3):

式中,ms为测距误差;mα为测角误差;D为激光发射点到测量点的距离。不同仪器,ms,mα值不同;D不同,各测量点的精度也不同。
4.1.2 高程内插误差
高程内插时采用双线性内插法,即以双线性表面表达真实的地形表面,因此存在因线性表达带来的精度损失,如图3所示为双线性表面沿AB线的剖面。图中P为双线性面上插值点,P'为相应的真实地表点,σ为因线性表达地表损失的高程精度。当双线性面较小时,地表近似为平面,该误差可忽略。

图3 双线性表面沿AB线的剖面
4.2 下沉盆地精度
下沉盆地内任一点的大小为 Δh=DEM1-DEM2,根据误差传播定律,可得:

式中,σΔh为下沉盆地中任一点精度,σDEM1,σDEM2为2期扫描数据DEM精度,同式 (2)中σsurf。
Trimble GX200扫描仪采集数据高程精度可达8mm@50m,12mm@100m,为获取高精度的扫描数据,单站最大扫描距离设置为50m,扫描采样密度设置为100mm,以该数据建立DEM时,因线性表达地表导致的精度损失较小,可忽略。
在相同的观测条件及数据处理方法下,可获得同等精度的DEM,则式 (4) 中σΔh=■2σsurf。由理论分析,下沉盆地的精度σΔh<7.9mm,小于文献 [2]对下沉盆地边界10mm的定义,受外界环境的影响,实际精度会低于理论精度,但仍能达到厘米级,可用于快速获取大面积沉陷盆地。
此外,扫描仪型号不同,其扫描精度差异较大,在扫描范围内各测量点的精度也不相同,扫描精度随着距离的增加而降低。DEM模型的精度与扫描点云的采样密度也密切相关,采样密度越大,DEM精度越高,沉陷监测精度也越高。实际应用中,应根据扫描设备及地形条件选择合适的扫描距离和采样密度,以保证沉陷监测的精度。
5 实例应用
对某矿区5305(2)工作面上方地表进行2次扫描,第1次扫描时间为2008年1月31日,共12站;第2次扫描时间为2008年2月13日,共9站。
5.1 数据处理
利用Real Works Survey Advanced软件对扫描数据进行预处理。剔除高大的树木等非地表点云,对扫描数据进行重采样,使点云密度均匀并减少数据量,预处理后点云如图4。
以本文方法对预处理后的数据做进一步处理,获取下沉盆地数据,并生成下沉盆地DEM,如图5。
5.2 成果分析
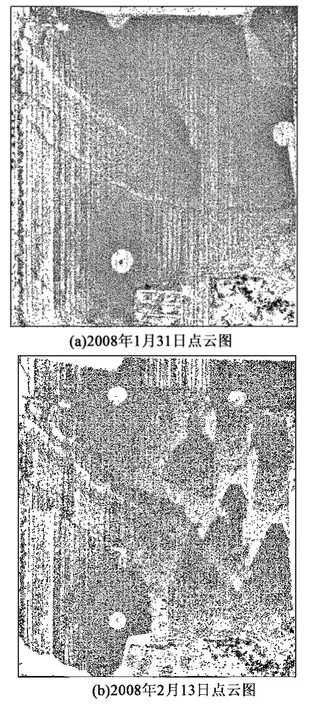
图4 2期扫描点云图
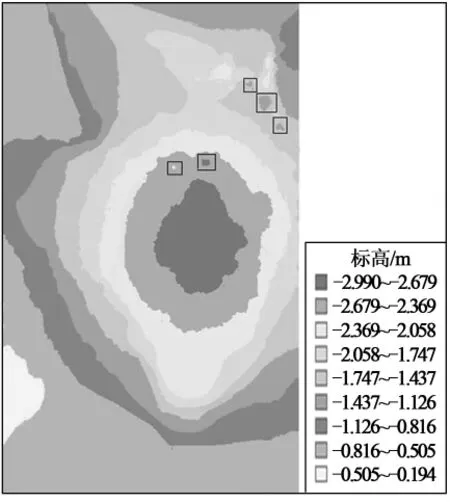
图5 地表下沉盆地
图5中下沉盆地DEM呈现由内向外的同心圆形结构,与实际地下开采引起的下沉盆地形态相吻合。由于扫描数据部分缺失,导致盆地DEM中相应的区域出现一定程度的错乱。在数据预处理时,有部分非地面点未被剔除,由这部分点云计算出的下沉值会出现较大的误差,如图5小矩形框内出现的斑点。
6 结束语
三维激光扫描技术用于开采沉陷监测,能够获取下沉盆地DEM,直观、全面地反映地表沉陷情况,为开采沉陷监测提供了新方法。通过理论分析,下沉盆地精度较高,实际应用中受外界环境影响,下沉盆地总体精度可达到厘米级,是快速获取沉陷全盆地的有效方法。另外,扫描仪精度和有效扫描距离的不断提高,为该技术在矿区的实际应用提供了条件。
[1]张 舒,吴 侃,王响雷,等.三维激光扫描技术在沉陷监测中应用问题探讨[J].煤炭科学技术,2008,36(11).
[2]何国清,杨 伦,凌赓娣,等.矿山开采沉陷学 [M].徐州:中国矿业大学出版社,1994.
[3]王婷婷,靳奉祥,单 瑞.基于三维激光扫描技术的曲面变形监测 [J].测绘通报,2011(3):4-6.
[4]吴 侃,黄承亮,陈冉丽.三维激光扫描技术在建筑物变形监测的应用[J].辽宁工程技术大学学报 (自然科学版),2011,30(2):205-208.
[5]李海泉,杨晓锋,赵彦刚.地面三维激光扫描测量精度的影响因素和控制方法[J].测绘标准化,2011,27(1).
[6]李庆林,朱 庆.数字高程模型[M].武汉:武汉测绘科技大学出版社,2000.
猜你喜欢
小学阅读指南·低年级版(2021年3期)2021-03-19
当代陕西(2020年23期)2021-01-07
电子制作(2019年14期)2019-08-20
国际呼吸杂志(2019年1期)2019-01-28
西南石油大学学报(自然科学版)(2018年1期)2018-02-10
中国自行车(2017年1期)2017-04-16
故事会(2016年21期)2016-11-10
安徽地质(2016年4期)2016-02-27
全球定位系统(2015年4期)2015-02-28
油气地质与采收率(2014年6期)2014-12-16