
利用LD激光器和线阵CCD实现亚毫米级绝对距离测量
2013-08-31 02:32张树才
装备制造技术 2013年2期
张树才
(装备学院,北京101416)
激光测距主要有脉冲式、相位式和干涉式三种方法[1]。脉冲式主要针对远距离测量,精度约在1m量级;相位式主要针对中近距离测量,精度约在毫米量级;干涉法有很高的测量精度可达皮米级,目前在产品级别只能进行相对距离测量[1]。虽然干涉法在实验室有进行绝对距离测量的相关论文[2],但对光源及其外围器件要求太高无法进行商品化生产。本文提出了利用LD激光器和线阵CCD实现亚毫米级绝对距离测量。
1 利用LD激光器和线阵CCD实现绝对距离测量
1.1 基本测量原理
基本测量原理如图1所示。
LD光源与线阵CCD安装在同一平面上,当被测目标位于初始位置b1时,从LD光源发出的光以α角度射向被测目标B1点后被反射到线阵CCD的C1点,当被测目标移动到b2位置时,从LD光源发出的光以同样角度射向被测目标B2点后被反射到线阵CCD的C2点形成三角形AB2C2,由于被测目标反射面的安装与LD光源和线阵CCD安装平面平行,则:

上式中C1C2是线性CCD通过相关电路测出的相对长度,AB1、AC1和激光发射角α 是初始常量,通过式(2)可解算出B1B2,将其代入式(1)即可解算出测试距离b1b2,这样被测目标的绝对空间距离与线阵CCD感光点建立了一一对应的关系,当被测目标位移较短时可得到较高的精度。
1.2 利用亚像素技术实现精度保证
图像几何测量的基本原理是通过运用数字图像处理方法处理被测对象的边缘而获得被测对象的几何参数。为提高测量精度,可以通过改变硬件和优化软件两种方法实现。改变硬件主要是提高CCD的分辨率,但CCD的分辨率是有限的,而且分辨率越高其价格也越昂贵,将极大地增加系统的成本。优化软件则是通过采用高精度的边缘提取算法—亚像素定位方法,对图像中目标进行亚像素细分处理。
所谓亚像素测量即测量精度优于硬件像素的分辨率。通常测量判断光斑中心点采用阈值判断,电平高于某值输出“1”,低于某值输出“0”,得到的分辨率与像素数量相当。亚像素则是利用A/D变换器作为像素感光值输出,假设有两个像素存在感光,左边的感光值为20,右边的感光值为100,采用计算像素的感光值所占的权重比,在此为20/100=1/5,则得出光斑中心应处于右边像素偏左1/5像素间隔处,如果A/D转换器的位数为8位则理论上精度可提高255倍,由于线阵CCD像素是离散的即其输出并不能完全反映光点的绝对位置,经实际验证采用亚像素技术精度提高2~5倍时数据是可信的[3]。

图2 实际线阵CCD激光光斑成像图
图2为实际线阵CCD激光光斑成像图,输出采用8位A/D采样,下面一行数字为对应像素单元的亮度值,可以看出亮度值是一个渐变的过程而且左右渐变并不严格对称。本文采用的方法是先寻找到最大值,然后在最大值两边各取同样数量的像素值算术求和,最后用力矩平衡计算光斑中心位置。
2 系统实现
本文是某机器设备平衡控制系统平衡锤位置感知模块,系统结构如图3所示。模块由LD激光器、准直镜、反射镜、线阵CCD、A/D转换器、控制器和受控电源组成。使用受控电源是为满足系统节电需求。
模块工作过程如下:平时模块处在待机状态,当设备平衡控制系统要调整平衡锤位置时首先发出指令打开模块受控电源,模块上电进行初始化,模块完成初始化后首先对被测目标进行距离测量,完成后控制器向上位机发出数据上传请求,上位机应答后上传数据,完成后等待上位机发出新的测距指令。测距完成后上位机通过关闭可控电源使模块进入待机状态完成一个测距循环。
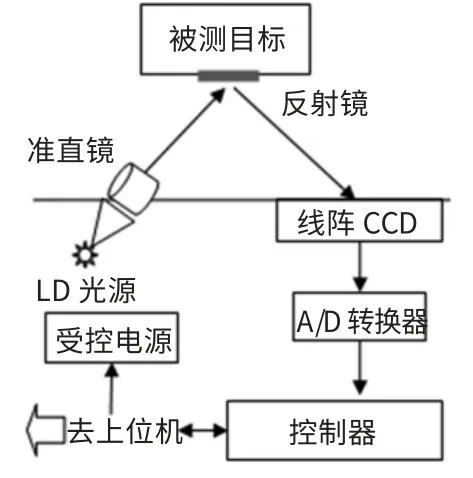
图3 系统结构图
3 结束语
本文提出了利用LD激光器和线阵CCD实现了亚毫米级的非接触绝对距离测量,测长可达2m,但本方法只能在近距离得到较高的精度,而且对合作目标要求有一定的轴向稳定性,因而也限制了使用范围。
[1]李 枭.半导体激光测距系统的优化研究[D].北京:北京邮电大学,2010.
[2]梁 晶,龙兴武,张 斌,等.一种新型多波长绝对距离干涉测量系统的研究[J].光学技术,2008,(9):77-78.
[3]王后顺.ATOS光学测量技术[J].宝力机械,2012,(5):169-170.
猜你喜欢
好日子(2022年6期)2022-08-17
河北省科学院学报(2020年4期)2020-03-19
科学(2020年6期)2020-02-06
阅读(高年级)(2019年9期)2019-11-15
阅读与作文(小学高年级版)(2019年8期)2019-10-16
小资CHIC!ELEGANCE(2019年28期)2019-09-12
影像技术(2019年5期)2019-09-10
电子制作(2018年9期)2018-08-04
CHIP新电脑(2016年3期)2016-03-10
中国医疗美容(2015年1期)2015-07-12
