
基于MFFK和Mean-Shift的红外船舶目标跟踪算法研究
2013-08-24 00:43:40徐晓波李卫斌
计算机工程与应用 2013年5期
徐晓波 ,李卫斌 ,2
1.西安科技大学 电气与控制工程学院,西安 710054
2.咸阳师范学院 信息工程学院,陕西 咸阳 712000
红外成像系统与雷达相比,具有结构简单、体积小、重量轻、分辨率高、隐蔽性好、抗干扰能力强等优点;与可见光成像系统相比,有透过烟尘能力强,可昼夜工作等特点。红外热像仪受环境影响小,其红外成像具有直观、抗干扰能力强、气候环境适应性强、全天候昼夜连续被动探测、测角精度高等优点,通过图像处理算法能获得更加准确的目标信息,既具有实时性,又具有稳定有效性,适合复杂内河船舶目标的跟踪。
目前,基于红外图像的运动船舶目标跟踪算法的研究主要有:裴继红[1-2]等对前视红外成像目标的实时识别与跟踪技术进行了研究,提出了三类识别特征(位置特征、形状特征、辐射特征)及这三类特征的六个模糊隶属度函数,采用模糊综合评判技术对分割区域进行目标识别。刘松涛等[3]研究了舰船红外成像目标的智能跟踪技术,通过对成像阶段和跟踪算法的分析,提出了一种新的复合跟踪算法,对MAD跟踪算法和形心跟踪算法作了进一步改进,依据高亮点数实现跟踪算法之间的切换。许开宇[4]提出了基于BP网络修正的卡尔曼滤波单目标跟踪算法。对于内河复杂背景下的运动船舶目标,上述基于红外图像的运动船舶目标检测和跟踪算法,仅仅只有在目标较近,且信噪比很高的情况下才能得以使用,在很多复杂内河背景下不能被使用。
本文采用基于MFFK分形特征与Mean-Shift方法相结合的红外船舶目标检测跟踪算法,该算法适用于内河背景,适应性强,检测精度高。对处于各种内河复杂背景中的运动船舶目标可实现实时、可靠的检测与跟踪。
1 基于多尺度分形特征MFFK目标检测
本文采用的是基于地毯覆盖法[5-6]的一种新的多尺度分形特征参数MFFK[7](Multi-scale Fractal Feature related with K)。关于MFFK的计算如下:
对于二维图像,其满足如下性质:

其中,ε表示尺度,ε=0,1,…,εmax;A(ε)表示在尺度 ε下的图像灰度表面的表面积测度;F D(Fractal Dimension)表示分形维数;K为拓扑维数D(这里D=2)维下的面积。
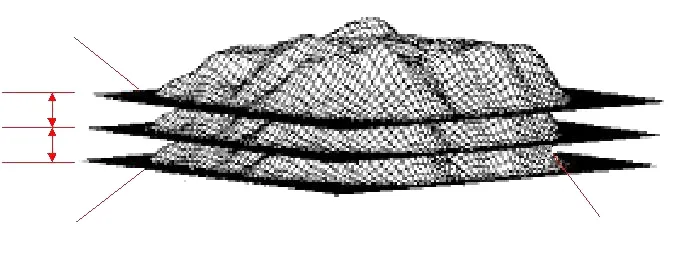
图1 地毯覆盖法示意图
在地毯覆盖法中,图像 f(x,y)被视为三维欧式空间中的一个表面,用像素灰度值代表空间深度构成一个3维的数字的纹理表面。若以该表面中的某一个点为中心,考虑与中心点距离超过ε的像素点的集合,用一个厚度为2ε的“地毯”进行覆盖,则表面的面积可由地毯上表面u(x,y,ε)、下表面b(x,y,ε)间的体积V(x,y,ε)除以2ε得到:

当度量尺度分别为 ε1=ε,ε2=ε-1,对公式(1)两端取对数,再代入度量尺度,由于K为理想状态2维下的面积参数(为一常数),在实际计算中,K不是一个常数。用K*来表示F D维下的关于ε的面积函数:

为了突出自然景物和人造目标的F D维面积K*随尺度变化的差异,定义分形参数变化度量函数——与F D维面积K*相关的多尺度分形MFFK特征为:

其中εmax是实际计算分形参数时所取的最大尺度,εmax∈N,εmax≥2。MFFK可以理解为在 εmax的尺度范围内 F D维面积K*的变化程度(人造目标像素的MFFK参数值比自然环境像素的MFFK参数值普遍要大),MFFK是一个新的多尺度分形特征,用于实现突出人造目标与自然背景在分形特征上的差异。
基于多尺度分形特征MFFK的船舶目标检测算法流程图如图2所示。
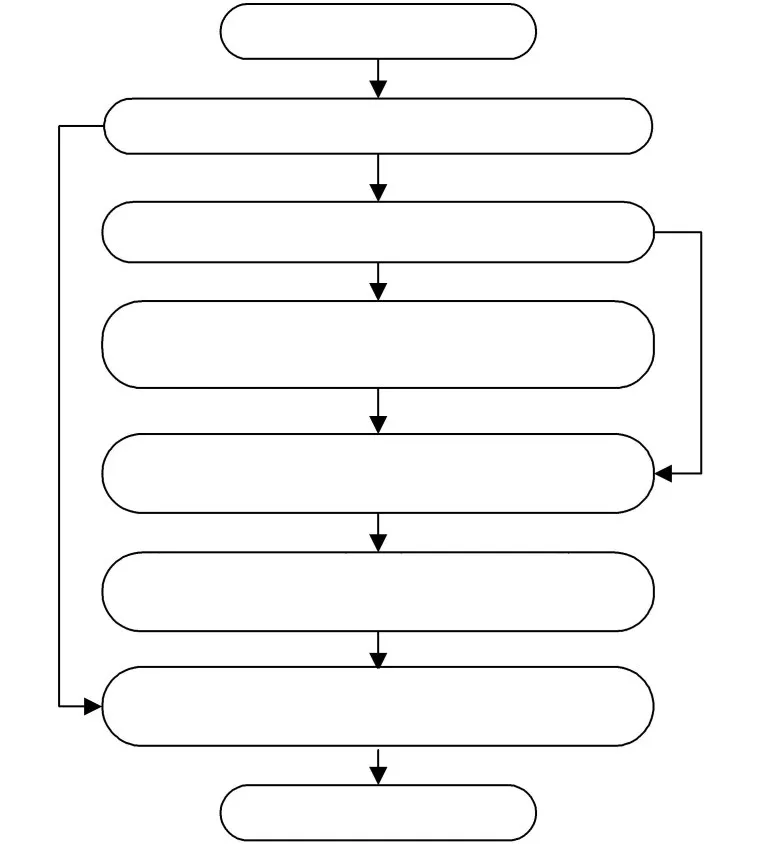
图2 基于MFFK特征的船舶目标检测算法
由于MFFK特征在灰度图像中提供了足够的信息来分辨内河船舶目标和自然背景,因此,只需要使用无需提供参数的OSTU(计算出一连通区域的阈值,然后对该区域二值化)图像分割方法,直接根据MFFK特征参数进行图像分割,其中灰度值为255附近的像素就表示了内河船舶目标。最后,把分割结果图像映射到原始图像中,即可获得最终的检测结果图像。对于检测结果图像中可能存在的极少的假船舶目标,可以利用内河船舶目标的先验知识,或船舶目标跟踪算法进行确认,并最终去除假目标。这样,就实现了从红外图像中进行内河船舶目标的检测。
2 Mean-Shift跟踪算法
Mean-Shift目标跟踪算法[8]主要利用目标的灰度和纹理特征的统计分布描述目标,并通过均值移位向量的梯度下降搜索达到目标跟踪。其跟踪过程首先是对目标模型的描述,以一定间隔的灰度值为单位,将取值为像素灰度值的特征空间分为多个特征值。那么在初始帧,包含目标的搜索窗口中,得出第u个特征值的概率。然后建立候选模型,运动目标在第二帧及以后的每帧中可能包含目标的区域称为候选区域,其中心坐标为y,也是核函数的中心坐标。该区域中的像素用x表示。对候选区域的描述称为目标候选模型,求出候选模型的特征值u=1,2,…,m的概率密度,计算出相似性函数。在当前帧中,以前一帧搜索窗口的位置作为当前帧搜索窗口的位置,设窗口中心为y0,在 y0邻域内寻找局部最优目标位置 y1(相似度最大)。
其中实现跟踪算法的步骤如下:
(2)确定候选内河船舶目标的新位置。
阈值 ε的选取应使得 ŷ1和 ŷ0的距离小于1个像素间距。如果ε取得更小,可以取得亚像素级的精确度。为了满足实时跟踪的要求,限制整个迭代过程执行的次数在2次以内,实际执行跟踪过程中平均的迭代次数一般为3次就可以满足停止条件。
实际执行算法时,只需迭代地计算步骤(2)中的权值wi;步骤(3)中新的目标位置和检验校核函数移动的步长。仅需在算法迭代结束后,才计算参考内河船舶目标和候选内河船舶目标之间的Bhattacharyya系数。
另外,在本文中,核函数选为Epanechnikov核函数,并选择如下式所示的Epanechnikov剖面函数时:


3 实验仿真结果
与分形维数F D、D维面积K、分形模型拟合误差F M F E、与F D相关的多尺度分析参数M F F D,进行船舶目标检测性能仿真实验比较。重叠区域ROO(Region Of Overlap)ROO的数值表示了自动分割结果图像和理想的分割结果图像之间的吻合程度,当ROO的值越大,表明两个分割结果图像越接近,相应检测算法的检测精度越高。
实验表明:在参与比较5个分形参数中,在内河复杂背景红外图像中,MFFK具有最好的船舶检测精度,该参数提供了最优的内河船舶目标和内河自然背景分辨能力。
原始的Mean-Shift方法与本文提出的新的Mean-Shift方法的船舶目标跟踪实验仿真结果对比如图4。
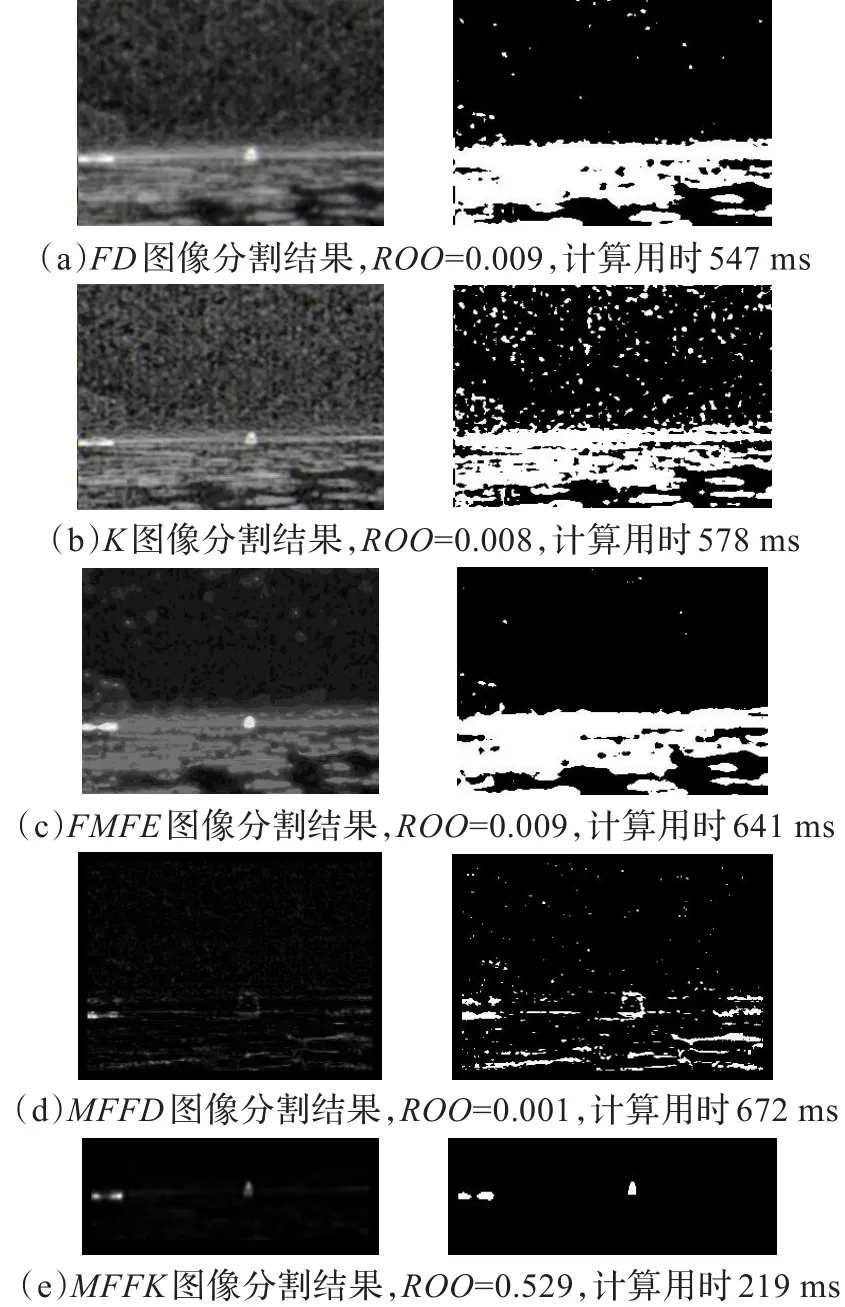
图3 5种分形特征的实验对比图
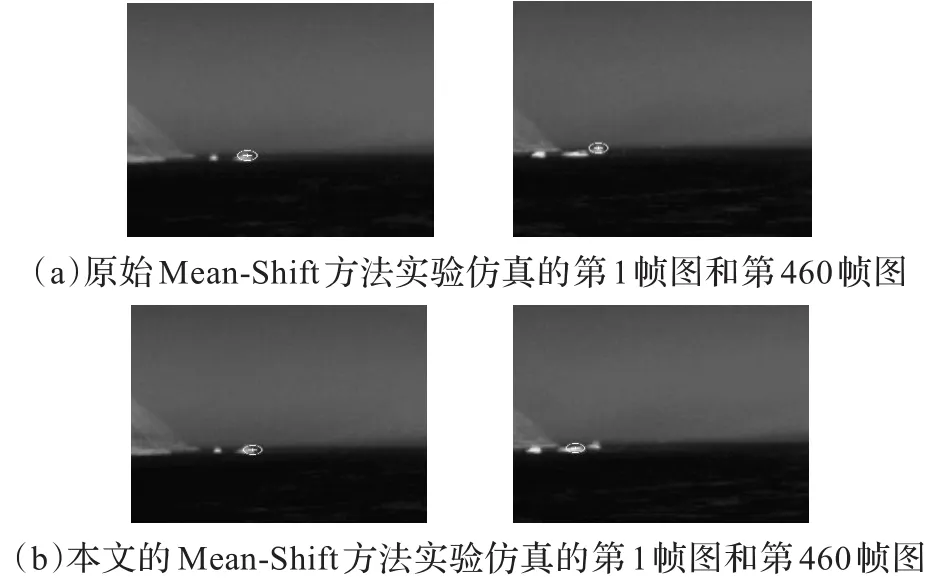
图4 两种Mean Shift的实验对比图
原始算法处理速度为13 f/s,间隔5帧进行跟踪的实验结果,图4(a)显示第1帧的跟踪结果正确,第460帧的跟踪结果出现偏差,跟踪定位失败;当使用新的算法时,处理速度为7 f/s,同样间隔5帧进行跟踪,图4(d)中显示第1、460帧及其所有中间帧均实现了正确的跟踪。
结果表明:该方法明显优于传统的Mean Shift算法;在相对简单的内河背景中,该算法能够应付场景的各种变化,同时能有效地避免相似内河船舶目标靠近正在跟踪的目标或者和正在跟踪的目标交错引起的情况。
4 结论
本文采用基于MFFK分形特征与Mean-Shift方法相结合的红外船舶目标检测跟踪算法,该算法适用于内河背景,因算法简洁、实时性好、能够处理目标变形、部分遮挡等困难情形,具有极大的实用价值,是视觉目标跟踪领域的研究热点之一。目前大量的研究集中于进一步改善算法对目标变形、旋转等方面的处理性能,及使用更精细的模型以便跟踪更多的运动状态[10]。
[1]裴继红,谢维信,刘上乾.舰船红外成像目标实时识别跟踪算法研究[J].光电工程,1995,22(5):21-31.
[2]刘松涛.舰船红外成像目标智能跟踪算法研究与实现[J].激光与红外,2005,35(3):193-195.
[3]刘松涛.舰船红外成像目标实时识别与跟踪系统研究[J].系统工程与电子技术,2005,27(8):1405-1408.
[4]许开宇.基于红外图像的运动船舶检测及跟踪技术的研究[D].上海:上海海事大学,2006.
[5]魏颖.一种基于多尺度分形新特征的目标检测方法[J].东北大学学报:自然科学版,2005,26(11):1062-1066.
[6]Peli T.Multiscale fractal theory and object characterization[J].J Opt Soc Am A,1990,7(6):1101-1112.
[7]刘俊.基于红外图像的内河运动船舶目标检测和跟踪技术研究[D].重庆:重庆大学,2008.
[8]朱胜利.快速运动目标的Mean Shift跟踪算法[J].光电工程,2006,33(5).
[9]Comanicin D,Ramesh V,Meer P.Real-time tracking of nonrigid objects using mean shift[C]//Proc of the IEEE Conference on Computer Vision and Pattern Recognition.Hilton Head Island,USA:[s.n.],2000,2:142-149.
[10]齐飞,罗予频,胡东成.基于均值漂移的视觉目标跟踪方法综述[J].计算机工程,2007,33(21):24-27.
猜你喜欢
动漫星空(兴趣百科)(2020年11期)2020-11-09 05:42:58
内蒙古民族大学学报(社会科学版)(2020年2期)2020-11-06 09:08:52
水上消防(2019年3期)2019-08-20 05:46:06
趣味(数学)(2019年12期)2019-04-13 00:29:04
Acta Mathematica Scientia(English Series)(2018年6期)2018-03-01 03:13:36
太空探索(2016年5期)2016-07-12 15:17:55
船海工程(2015年4期)2016-01-05 15:53:28
时代英语·高三(2014年5期)2014-08-26 17:01:17
中国航海(2014年1期)2014-05-09 07:54:27
中国航海(2014年1期)2014-05-09 07:54:23
