
机载光电吊舱自抗扰控制算法研究
2013-08-23 08:33胡东方商建东
制造业自动化 2013年17期
陈 璐,胡东方,商建东
CHEN Lu, HU Dong-fang, SHANG Jian-dong
(河南科技大学 机电工程学院,洛阳 471003)
0 引言
随着机载吊舱技术的不断发展,加装吊舱可以使飞机所具备的功能越来越多,如空中救灾指挥、数字化城市、国防侦察等。由于机载光电吊舱在空中执行任务时受风阻力、机械振动、负载扰动等多种因素影响[1],这些随机性因素及非线性因素导致机载吊舱的模型难以精确建立,因此采用传统的控制算法不易达到其控制性能指标。然而,作为宇航领域的一个关键技术,提高机载光电吊舱控制精度具有很大的军事和经济价值[2]。目前所设计的控制器多采用传统PID控制算法,控制器参数要实时调整,控制系统抗干扰能力一般,很难满足机载吊舱高空作业的性能要求。自抗扰控制器是在继承经典PID控制器不依赖于对象模型优点的基础上,通过改进经典PID控制器固有缺陷而形成的新型控制器。研究表明,自抗扰控制器对具有非线性、大惯性、不确定性、强干扰、大时滞和强耦合等特性的被控对象具有较好的控制品质[3]。
本文将自抗扰控制算法应用到机载光电吊舱系统中,将所有影响因素归结为一个总扰动进行在线观测和补偿,以期进一步提高伺服精度[4]。通过MATLAB/Simulink对系统在传统PID控制和自抗扰控制上的响应快慢以及抵抗扰动能力方面进行了仿真实验。结果表明,自抗扰控制器具有更好的控制效果,更适应于机载光电吊舱系统。
1 机载光电吊舱控制系统模型分析
本文所研究的吊舱控制系统选用直流伺服电机实现方位和俯仰运动,直流伺服电机与其他电机相比,具有调速范围宽、高精度、高效率、响应迅速等优点,其能将直流电能转换为机械能,从而完成各种运动[5]。等效电路如图1所示。
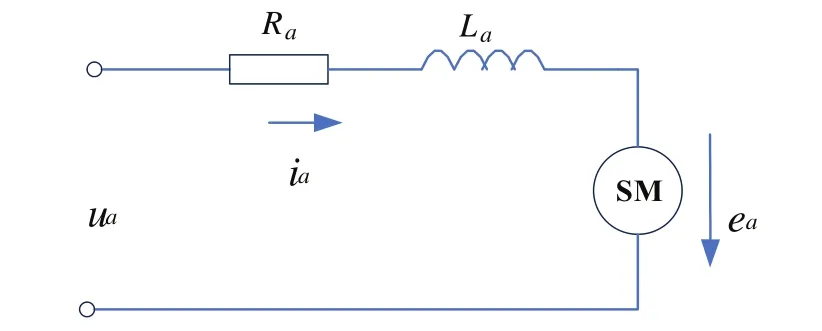
图1 直流伺服电机等效电路
图中,Ra、La、ea分别为电枢回路的电阻(Ω)、电感(H)和电机反电动势(V)。
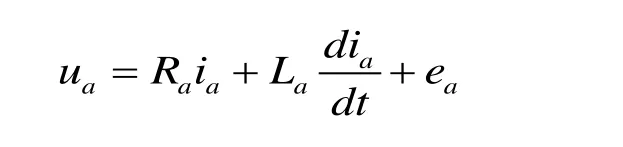
通过分析直流伺服电机的等效电路,电枢回路的电压平衡方程为:
当负载转矩为零,同时忽略电机的摩擦转矩和铁心损耗后,电动机的电磁转矩全部用来加速转子,则:

此时可以得到直流伺服电机的传递函数:

以上公式中,J为电动机轴上的总转动惯量(kg·m2),Tem为电动机电磁转矩(N·m),Kt为电机转矩系数(N·m/A ),Ke电机的电动势系数(V·s/rad);本文所选用电机参数如表1所示。

表1 直流伺服电机参数
机载光电吊舱控制系统的关键组成部分主要有位置调节器、脉宽调制变换器、光电编码器和直流伺服电机[6]。机载光电吊舱控制系统要求具备较高的跟踪能力和抗干扰能力,当受到飞行姿势改变和风阻力变化等干扰时,此系统要具备一定的鲁棒性。现以方位轴为例,构建机载光电吊舱控制系统模型[7],如图2所示。
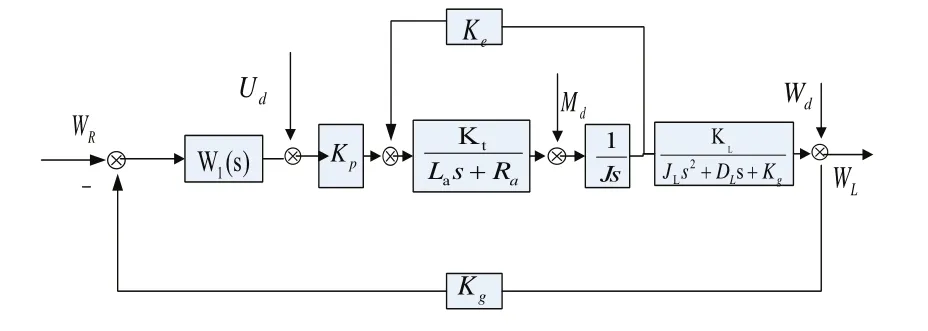
图2 机载吊舱控制系统数学模型

根据以上参数计算和分析,可得机载光电吊舱控制系统的传递函数如下:

2 自抗扰控制技术的分析及应用
2.1 自抗扰控制器的结构分析
自抗扰控制器主要由过渡过程的安排、扩张状态观测器、状态误差的反馈形式、扰动估计的补偿四个部分构成,能够实现对外部扰动的实时性估计和补偿,具有很强的鲁棒性[8]。
自抗扰控制器应用最多的是在一阶、二阶控制系统,同时也适用于高阶控制系统。本文针对机载光电吊舱系统所适用的二阶自抗扰控制器进行了分析与设计[9]。 二阶自抗扰控制器结构如图3所示。
二阶自抗扰控制器是由如下组成:
1)微分跟踪器(TD):安排过渡过程,由定值v安排过渡过程v1并提取其微分信号v2:

图3 二阶自抗扰控制结构原理图

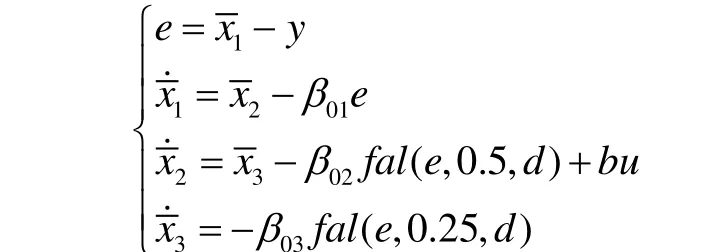
2)扩张状态观测器(ESO):根据被控对象的输出y和输入的控制信号u估计出对象的状态x1、x2和作用于对象的总扰动x3:
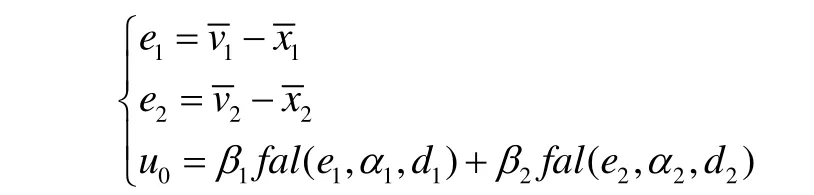
3)动态误差的非线性反馈律(NLSEF):系统的状态误差是指e1=v1-,e2=v2-,积分器串联型对象的控制规律u0:

2.2 离散自抗扰控制算法及Simulink实现
工程控制一般需要用数字控制器实现,故先将系统控制对象模型离散化,再通过MATLAB下的S-函数编程来建立自抗扰控制器,分别建立跟踪微分器TD的S-函数hanTD、扩张状态观测器ESO的S-函数hanESO、非线性状态误差反馈律NLSEF的S-函数hanNLSEF[10],由以上模块就可以在Simulink里搭建好控制系统仿真模型并进行仿真。机载光电吊舱自抗扰控制仿真方案原理如图4所示。
3 仿真结果分析
为了对比本文所设计的自抗扰控制器和传统PID控制器的控制效果,我们在MATLAB/Simulink环境下对机载光电吊舱的进行了相关仿真试验,同时不断调整并给出了控制参数,通过对试验结果分析比较两种控制算法的优缺点。
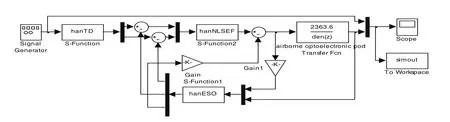
图4 机载光电吊舱自抗扰控制仿真原理图
3.1 阶跃信号响应结果分析
经典PID控制器、自抗扰控制器仿真结果如图5所示,自抗扰控制器比PID控制器响应更快,调节时间由38ms减小到22ms,能更快达到稳态值。
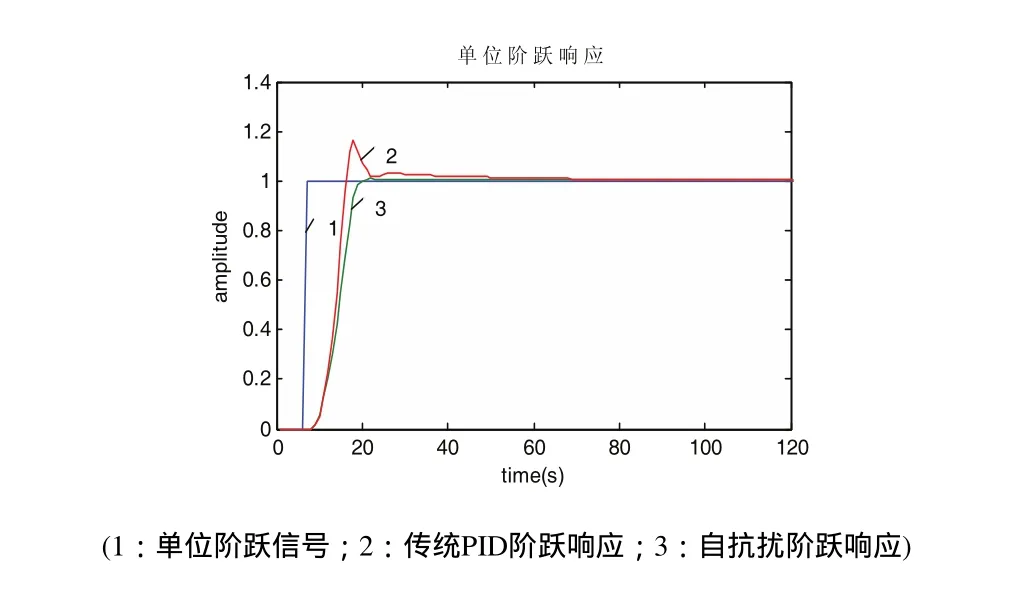
图5 单位阶跃响应对比曲线
3.2 正弦信号跟踪结果分析
由于机载光电吊舱要求准确的追踪并锁定目标,因此对其跟踪能力有较高的要求,利用正弦信号作为输入信号,进行仿真分析,结果如图7所示,经典PID控制器波形跟踪能力相比自抗扰较弱,跟踪误差最大幅值达到0.05s,自抗扰控制器跟踪误差最大幅值达到0.023s,可见自抗扰控制器波形跟踪能力较强。


图6 正弦跟踪对比曲线
3.3 抗干扰性能分析
机载光电吊舱控制系统在空中执行任务会受多种因素扰动,因此对PID和自抗扰进行抗扰性能仿真试验。当系统进入稳定状态后,在t=100ms处加入3N·m的阶跃干扰信号,运行系统仿真模型,观察两种控制器在加入扰动情况下的输出响应。PID控制和自抗扰的响应曲线如图7所示。
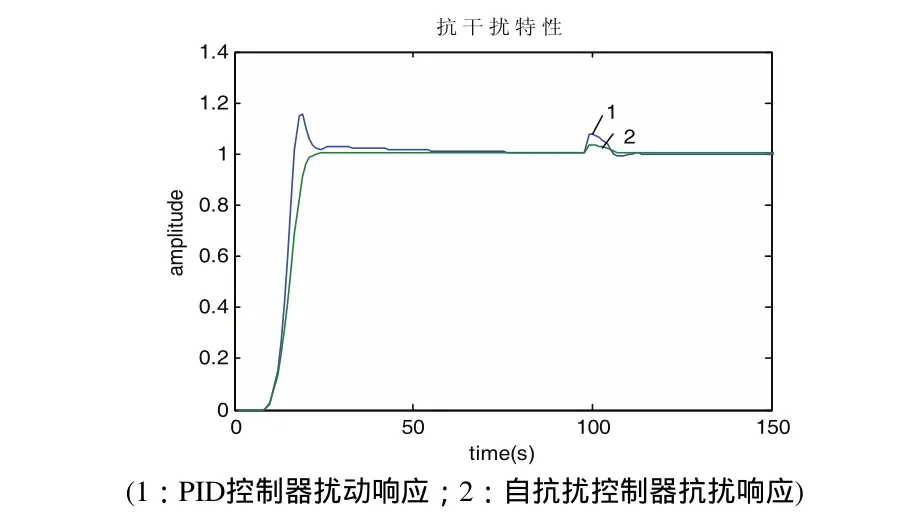
图7 抗干扰特性曲线
从图7可知,自抗扰控制系统在受到干扰时具有较快的自我恢复能力,并且有效抑制干扰信号,系统超调量较小,更适合机载光电吊舱系统。
4 结论
针对机载光电吊舱控制系统,选用直流伺服电机驱动两轴的运动,实现机载吊舱水平和俯仰两方向的跟踪。在直流伺服电机的建模基础上,对整个吊舱控制系统进行建模和分析,根据自抗扰控制原理,设计了二阶离散自抗扰控制器,同时利用MATLAB/ Simulink软件对系统进行理论性能分析和实验验证,表明自抗扰控制器能使系统具有良好的跟踪精度和快速的响应速度,具有一定的应用效果。
[1]王丽博,商建东.卡尔曼滤波在机载监视系统中的应用研究[J].机械设计与制造,2011(9):58-60.
[2]侯卫国.光电吊舱控制系统设计及实现[D].上海:复旦大学,2006.
[3]夏长亮,李正军,杨荣,祁温雅,修杰.基于自抗扰控制器的无刷直流电机控制系统[J].中国电机工程学报,2005,25(2):82-86.
[4]龙满林,付永领,李光华,陈双桥.自抗扰算法在直流力矩电机伺服系统中的应用[J].中国机械工程,2012,23(9):1047-1050.
[5]祁文军.基于MATLAB仿真的直流伺服电动机动态特性分析[J].现代制造工程,2005(10):90-92.
[6]王丽博.机载光电吊舱控制系统的研究及应用[D].河南科技大学,2011.
[7]郭飞.光电吊舱陀螺稳像系统的计算机控制研究[D].哈尔滨工程大学,2008.
[8]马永光,郝娜,王晓丽.自抗扰控制在火电厂球磨机系统中的应用[J].华北电力大学学报,2006,33(5):48-51.
[9]刘星桥,唐琳,周丽.二阶自抗扰控制器在三电机同步系统中的应用[J].电工技术学报,2012(2):179-184.
[10]邰治新.基于自抗扰控制器的无刷直流电机调速系统的建模与仿真[D].大连:大连交通大学,2005.
猜你喜欢
科学大观园(2022年14期)2022-07-17
中等数学(2021年9期)2021-11-22
微特电机(2020年11期)2020-12-30
中央民族大学学报(自然科学版)(2018年3期)2018-11-09
电子制作(2018年17期)2018-09-28
通信电源技术(2018年3期)2018-06-26
航空模型(2016年10期)2017-05-09
电子制作(2016年1期)2016-11-07
湖南师范大学学报·自然科学版(2014年3期)2014-10-24
