
基于d SP ACE和AVL的纯电动汽车电驱动系统效率测试
2013-08-22 07:33:18王军
客车技术与研究 2013年5期
王 军
(安徽安凯汽车股份有限公司,合肥 230051)
目前,在测试纯电动汽车电驱动系统效率时,通过将AVL(AVL List GmbH)测功机与电机通过弹性连轴器连接,AVL测功机运行在转速模式下,电机运行在转矩模式下,这样电机就能运行在特定的转速下受到不同的转矩,就能测试出电驱动系统在特定转速点与特定扭矩点的效率[1-4]。然而,这些特定的转速点与转矩点的效率并不能代表实时路况下的效率。如果电机能按照特定的工况运行,那就能测试出电机在该工况下运行的各点的效率,这是实时路况下电机的效率,是电机设计很重要的数据。因此,提供一种实时路谱下的纯电动汽车电驱动系统效率的测试方法,是该领域技术人员应着手解决的问题。dSPACE是由德国dSPACE公司开发的一套基于Matlab/Simulink控制系统的研发和测试设备,其采用开放的HILS系统与AVL平台构成闭环系统,模拟各种运行情况来测试纯电动汽车电驱动系统效率[5-6]。
1 测试平台软硬件
如图1所示,试验均在AVL试验台架所搭建的系统上进行,采用安凯自主整车控制单元。在Simulink中建立工况模型,用dSPACE建立工况的仿真模型,结合AVL测功机监控系统,来进行纯电动汽车电驱动系统效率的测试。
dSPACE系统实物照片如图2所示。其中主要包括整车控制单元、dSPACE硬件、上位机、纯电动车用仪表。AVL测试平台实物照片如图3所示,其中包含AVL测功机、待测电机控制器、待测电机、高压控制单元。
AVL测试平台与dSPACE的连接如图4所示。dSPACE系统、整车控制单元、AVL测试平台、待测电机控制器之间的连接都是通过CAN线连接的[7]。
2 测试实例及结果分析
测试样品有关参数分别见表1和表2。

表1 电机样品有关参数
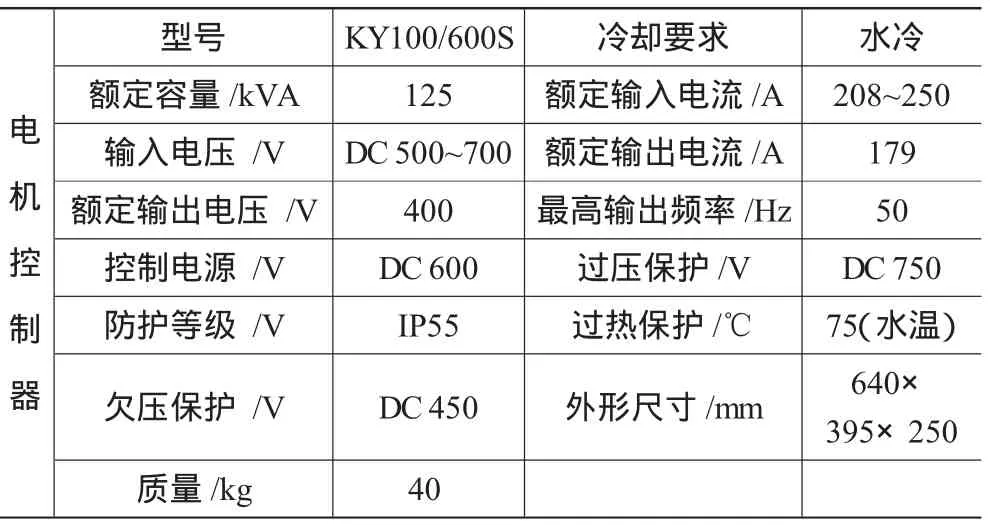
表2 控制器样品有关参数
根据纯电动汽车电驱动系统测试标准,最终采用了完整的路谱循环测试方案,道路试验循环路谱见图5。具体操作方法如下:首先通过dSPACE给整车控制单元上电,通过整车控制单元来进行整车模型的高压上电,在dSPACE上位机界面载入路谱信息,进行整车性能仿真实时路谱测试实验[8-11]。dSPACE的软件驾驶员模型根据路谱信息得到需求的车速,再计算实时需求的电子油门与刹车踏板位置信息,通过模拟信号接入整车控制单元,整车控制单元进行处理,转化为转矩信息,通过CAN网络发送给AVL测试平台,来达到控制待测电机控制器与待测电机按照特定的路谱来运行,同时AVL测试平台监控运行过程中的转速、转矩、功率等信息。
按照上述实验流程,首先验证整车的上电逻辑,符合要求,上电完成后,实施路谱自动循环实验,如图6所示,曲线1为路谱给定车速,曲线2为运行仿真车速。从图6中可以看出,车速跟随较好,满足实验要求。
图7、图8和图9为dSPACE根据路谱信息计算出来的电子油门踏板开度、电子刹车踏板开度和VCU通过CAN发送的实时转矩。从这3幅图中可以看出,与给定车速变化对应油门、刹车踏板位置变化和VCU采集到踏板位置处理后发送的实时转矩的变化。当有制动时,即出现负转矩。通过AVL测试平台监测运行过程中电机的转速、转矩、输出功率、输入功率等信息,来计算得到各个点的效率,最终得到图10所示的电驱动系统万有特性曲线图。从图10中可以看出,该电驱动系统的高效区域分布,同时经过计算,该电驱动系统效率大于80%的区域面积占整个区域面积的55%,大于50%,满足设计要求。
3 结论
本文详细论述了基于dSPACE和AVL的纯电动汽车电驱动系统效率测试,从理论上阐述了测试系统的可行性和必要性。dSPACE根据路谱信息计算出来的电子油门踏板开度与电子刹车踏板开度,整车控制单元根据计算得到对应的转矩信息,再通过CAN发送给AVL测试平台。通过AVL测试平台监测运行过程中电机的转速、转矩、输出功率、输入功率等信息,来计算得到各个点的效率,从而达到实时路谱下的纯电动汽车电驱动系统效率的测试,与传统的只能测试特定转速点与特定扭矩点的电驱动系统效率的实验方法相比,更贴近实际应用。该方法对纯电动汽车电驱动系统效率研究具有重要意义。
[1]宋强,王志福,张承宁.电动汽车电机驱动系统效率测试方法研究[J].微特电机,2006,34(6):4-6.
[2]GB/T 18488.2-2006,电动汽车用电机及其控制器(第2部分:试验方法)[S].北京:中国标准出版社,2007.
[3]张彩萍,张承宁,宋强.电动汽车电机驱动系统驱动工作区效率测试研究[J].微电机,2007,40(1):84-86.
[4]诸自强.现代电动车、电机驱动及电力电子技术[M].北京:机械工业出版社,2005.
[5]陈建松,陈南,殷国栋,等.基于dSPACE的4WS车辆硬件在环控制仿真研究[J].系统仿真学报,2010,(7):1622-1626.
[6]陈顺东,李韧.基于dSPACE的纯电动客车VCU硬件在环仿真测试[J].客车技术与研究,2012,34(5):16-18.
[7]饶运涛,邹继军,王进宏,等.现场总线CAN原理与应用技术(第2版)[M].北京:北京航空航天大学出版社,2007.
[8]卢子广,柴建云,王祥珩,等.电力驱动系统实时控制虚拟实验平台[J].中国电机工程学报,2003,(4)
[9]胡建军,国琛,秦大同,等.驱动工况下最佳效率的电力驱动系统控制分析[J].重庆大学学报,2008,(4):365-370.
[10]李斌花.纯电动汽车电机驱动系统控制策略研究[D].长沙:湖南大学机械与汽车工程学院,2005.
[11]宋强.电动车辆动力驱动系统测试平台设计开发及试验研究[D].北京:北京理工大学,2004.
猜你喜欢
汽车实用技术(2022年15期)2022-08-19 02:48:08
汽车维修与保养(2021年8期)2021-02-16 00:28:32
动漫星空(兴趣百科)(2019年3期)2019-03-07 07:47:46
四川冶金(2018年1期)2018-09-25 02:39:26
海外星云(2016年17期)2016-12-01 04:18:42
通信电源技术(2016年1期)2016-04-16 04:57:26
电机与控制应用(2015年3期)2015-03-01 03:49:59
噪声与振动控制(2015年4期)2015-01-01 07:08:09
客车技术与研究(2014年1期)2014-03-20 14:34:48
自动化博览(2014年10期)2014-02-28 22:33:55
