
一种基于严密平差的大尺寸移站测量算法
2013-08-20 12:35:54张鹏郭巍白昀
山西建筑 2013年29期
张鹏 郭巍 白昀
(1.上海金艺检测技术有限公司,上海 201900; 2.同济大学测绘与地理信息学院,上海 200092)
0 引言
随着船舶建造业的发展,精度控制成为影响造船质量的关键因素。特别是在大尺寸构件的生产装配中,高精度的控制方法已成为造船人员不断研究改进的重点。对于船舶等大尺寸构件,由于其体积大,通常无法在一个测站完成全部测量工作,移站测量法是近年应用广泛的一种直接统一多站坐标的方法[1],该方法精度高,可直接将不同测站所测坐标归算至选定坐标系下,避免了建立控制网和大量的后处理工作,还可根据采集数据及时判定点位偏差,进行现场校核,较好的解决了大尺寸测量问题[2]。但由于每次移站都会有移站误差,多次移站后的测站累计误差将不可忽略,本文在研究移站测量的基础上,提出一种通过测站回归闭合的方法,对全部测站数据进行整体平差,以降低转站误差,提高测点精度。
1 移站测量
工程工业测量的过程中,通常一个测站很难观测到整个被测物体的表面,并且由于受场地限制、不通视或后视距离太短的影响,常无法建立控制网。这时移动测量仪器,在不同测站上进行观测,各测站观测的坐标就表示在不同的坐标系内,若在不同站上观测了一组公共点,就可以将这些测站下全部测点的坐标归算至同一个坐标系[3],以方便进行整体精度控制、评估、三维建模和装配模拟。
1.1 移站测量观测误差模型
不同测站进行坐标测量时,测量仪器均是通过测站坐标以及对目标点的基本观测量(斜距、水平角、天顶距)来计算目标点的坐标值。本文现推导以全站仪观测量斜距、水平角、天顶距获取测站点坐标的三维平差方法。
如图1所示,设A,B两点为已知点,三维坐标分别为(XA,YA,ZA),(XB,YB,ZB),P为测站点,由P点位置对A,B两点进行观测,获取的观测值分别为斜距S1,S2,天顶距 β1,β2和水平方位角γ1,γ2,因此,可列各观测值的误差方程。
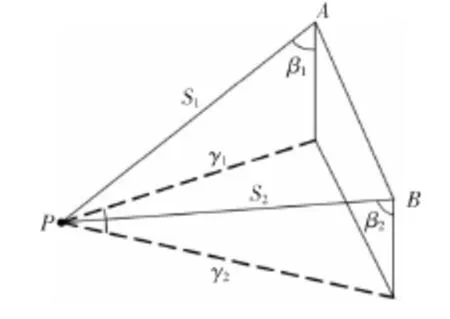
图1 移站测量计算原理图
1)斜距误差方程。
斜距观测值Si可根据测站坐标(XP,YP,ZP)以及目标点坐标(Xi,Yi,Zi)计算,并考虑测距误差,则有:

求得,斜距近似值为:

2)水平方位角误差方程。
水平方向观测值γi可由测站坐标及目标点坐标计算,并考虑测角误差,则有水平角误差方程:

3)天顶距误差方程。
天顶距观测值可由测站坐标及目标点坐标计算,考虑观测误差,则有天顶距误差方程:
1.2 移站测量数学模型
1.2.1 平差方程
根据1.1各观测值误差方程,利用间接平差,则有:

设角度观测中误差为m0,距离观测中误差为ms。

其中,a为测距固定误差;b为测距比例误差。
设角度权为单位权,距离权Ps为:

利用最小二乘平差得:

则可求得P点前一坐标系中的坐标(XP,YP,ZP)。
1.2.2 精度评定
设经N次移站后,选择A,B任意两点作为公共点,考虑A,B两点点位误差,对N+1站的站点Q坐标可列误差方程:


因观测值S,β,γ 与 λ 不相关,可知Q(L,λ)=0。
得Q点坐标改正协因数阵为:

其中,P为观测值的权,定权可参照式(7)。
2 移站测量的严密平差模型
由上述移站测量算法可知,经多次移站后,测站误差将逐站累积,从而降低该测站测点的测量精度。因此,本文提出一种多测站移站回归闭合的方法,对所有测站观测值及测站坐标进行整体严密平差,以降低移站误差积累,实现高精度整体测量。
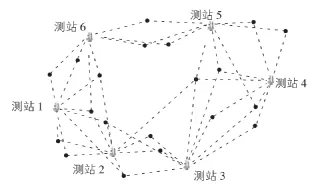
图2 移站闭合测量原理图
2.1 移站闭合原理
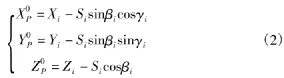
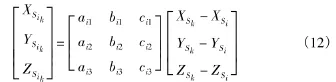
现规定全站仪第一测站坐标系为测量坐标系,其余测站均为测站坐标系,经过全站仪测量后,测站点(即测站坐标系原点)和空间点同时存在于测量坐标系和各测站坐标系中,所有测站点和空间点构成一个空间三维网(见图2)。各测站坐标系相对于测量坐标系的旋转和平移变换[5],其中,旋转参数为(,,),平移参数(即全站仪的空间位置参数)为(,),其中,i=1,2,…,n,测站点与空间点在i个测站坐标系中的坐标为(,,),其中,i=1,2,…,n,k=1,2,…,m+n,且k≠i。空间点在测量坐标系中的坐标为(,,),其中,k=1,2,…,m,则测站点或空间点在测量坐标系下的坐标与在第i个测站坐标系下的坐标关系可表示为:
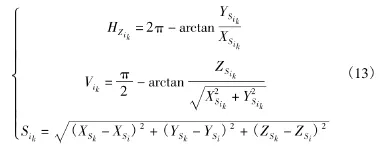
2.2 测站点和空间点坐标与其在测站坐标系下观测值的关系
测站点及空间点(统称点)在第i个测站坐标系中的坐标为(,,),第i个测站对点的观测值分别为,,,点坐标和观测值的关系可用以下函数式表示:
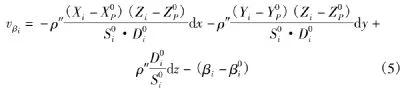
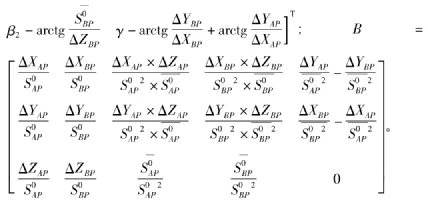
2.3 误差方程与求解
根据间接平差,设观测值的权为P,定权方法参照式(7),则权矩阵为:

可得:

经多次迭代后,可求得定向参数,从而完成平差。
3 实验与分析
为验证方法的正确性,笔者利用全站仪进行了6站数据的采集,如图1所示,相邻测站均有不少于三个的公共点。架立测站后,观测本测站全部测点的水平角、竖直角以及斜距,并根据测站坐标计算该测站坐标系下的全部测点坐标,各测站下采集的点及坐标值以P2,P3为例,见表1。

表1 各测站原始观测数据 mm
根据移站测量原理,将全部测站坐标值转至第一测站坐标系下,并选取第一测站P2,P3两点为坐标参考值,分别比较其余各测站两点坐标值,得出如表2所示结果。
根据移站闭合原理,将全部测站数据进行整体闭合平差处理,仍以第一测站P2,P3两点坐标值为参考,分别比较其余各测站两点坐标值,得出如表3所示结果。

表2 移站测量计算数据 mm

表3 移站闭合计算数据 mm

图3 P2 点各测站点位偏差
根据表2和表3的数据,分别比较P2,P3两点坐标值在不同的处理方法下,各测站点位总误差偏差,可以得到如图3,图4所示的结果。
通过分析可知:
1)利用移站测量进行移站时,随测站数的增加,测点的点位误差将会积累;
2)移站闭合算法能够降低由移站测量带来的误差累计,提高点位精度;
3)移站闭合算法可进行整体误差分配,不会造成误差的单点积累。
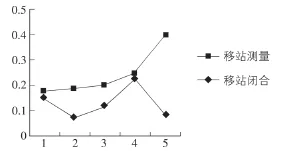
图4 P3 点各测站点位偏差
4 结语
本文提出的移站测量闭合算法,通过全部测站数据的闭合回归进行整体平差,可有效避免由多次移站而造成的误差积累,能够合理分配移站过程中各站误差,提高整体测量精度。该方法在船舶建造及相应大尺寸工业测量领域的应用,将会解决大尺寸构件数据采集时,因频繁移站导致的构件尺寸精度差的问题,提高构件测量精度,对后期船舶建造质量提供保障。方法简便,易于编程实现,计算速度较快,具有较高的实用价值,在船舶建造领域具有一定的应用和推广价值。
[1]苏志部.大尺寸测量的点云自动拼合技术研究[D].武汉:华中科技大学,2009.
[2]贾小丽.大型结构件检测的关键技术与实验研究[D].天津:天津大学,2008.
[3]潘国荣,张 鹏,孔 宁.造船精度控制系统中移站测量的一种实现方法[J].大地测量与地球动力学,2010,5(30):121-124.
[4]朱振宇,江国焰,王永明.工业测量系统自由坐标系建立方法研究[J].矿山测量,2009(5):63-69.
[5]刘红英,王淑清,李晓萍.自由设站的应用体会[J].山西建筑,2008,34(5):360-361.
[6]郭宗河.边角后方交会若干问题的探讨[J].测绘工程,2000,9(2):68-69.
[7]W.T.Estler,K.L.Edmundson,G.N.Peggs,et al.Large-Scale Metrology-An Update,CIRP Annals[J].Manufacturing Technology,2002,51(2):587-609.
[8]李 丽,法维刚.全站仪使用中边角后交的几种计算方法[J].辽宁科技学院学报,2009,11(2):38-39.
猜你喜欢
北京汽车(2023年1期)2023-03-03 00:50:38
地理空间信息(2022年11期)2022-11-26 05:47:02
电子制作(2019年14期)2019-08-20 05:43:42
国际呼吸杂志(2019年1期)2019-01-28 09:37:02
测绘学报(2018年10期)2018-10-26 06:12:16
机械研究与应用(2018年3期)2018-07-11 00:25:38
城市勘测(2018年1期)2018-03-15 03:37:02
中国自行车(2017年1期)2017-04-16 02:53:52
故事会(2016年21期)2016-11-10 21:15:15
地理空间信息(2013年4期)2013-09-28 07:42:12
