基于摄像头检测的防盗拍系统开发和算法研究
2013-08-20 04:57张文豪吴怀宇
电子设计工程 2013年18期
张文豪 , 吴怀宇
(1.武汉科技大学 信息科学与工程学院,湖北 武汉 430081;2.西英格兰大学 工程设计和数学系,布里斯托尔BS16 1QY)
伴随着摄像机等数码录制产品的发展,全球电影产业遭受到了日益严重的侵权和大额的利润亏损[1]。不法分子非法携入摄像机进入电影院盗拍电影[2],成为了盗版光碟、网络盗版电子内容的根源。在信息全球化的当今社会,其恶劣影响不仅传播迅速,而且难以有效控制。于是,对电影院中非法摄像头的检测便成为了一种有效的、直接的、从本源上消除这一现象的手段。然而目前对于摄像头的检测手段比较匮乏且效果欠佳——人工检测不仅费时费力,对电影院的环境产生干扰,而且十分低效;金属探测器[3]、非线性节点探测器[4]等辅助设备覆盖面积小,且专一性不够,不能有效地区分摄像头和其它电子或金属设备,以至于产生很高的误报率;即使捕捉摄像头工作时产生的无线信号,该信号也易与其他个人电子设备混淆于同一频谱而难以区分。这些检测摄像头的方法泛而不精,过于依赖于环境信息,对各种干扰的鲁棒性不强,以至于效果十分不显著而未被广泛采用。
鉴于此,一些基于视觉的方法用于检测非法摄像头的产品在商业市场上开始出现。虽然它们种类繁多,功能却是大同小异:通过检测摄像头镜头上的反射高光来侦查和定位摄像头[5]。该类产品通过内置的可见光源高频率闪烁,照亮潜在的摄像头镜头,并检测其反射光线以确定摄像头的存在。这类产品应用视觉检测的手段,表现出了一定了有效性,然而也存在十分大的局限性。1)高照明度的光源频闪对周围的人员干扰性巨大,不具有理想的隐蔽性;2)设备的有效范围不广,大多都被局限在10米以内,且需要人为控制,引导光源方向;3)设备检测算法单一,对任何检测到的反射高光都产生报警,无法区别摄像头镜头和其他产生高光的反射面。
通过和一英国公司以及一加拿大公司的合作,本文中介绍的系统克服了以上检测方法的不足,以一种系统的、智能的方式对非法摄像头进行检测。首先,本系统采用的智能算法针对性强,使用范围广,对环境依赖性低,具有很强的鲁棒性和广泛的高效性。其系统设计在摄像头检测领域具有其创新性;其次,智能算法采用层级检测算法和模式识别[6]算法相结合,涉及基于视觉方法的高光检测和识别领域。再次,该系统和算法具有可移植性,不仅适用于电影院环境,也适用于剧院、会议室等需要进行资料保密的场所,其算法也能用于解决机器人导航中的单目视觉等各类问题。以下将对该系统的硬件架构和检测原理进行介绍,对实验数据集进行统计分析,对模拟实验进行阐述,对软件和算法设计进行描述,并对实验结果和系统性能进行统计和分析。
1 系统硬件描述和原理介绍
该防盗拍系统通过系统地结合硬件、软件模块,旨在对无控环境中的各类摄像头进行精准地捕捉。本系统的硬件部分沿用了合作公司的系统架构[7],但对一些硬件模块进行了改造,使得系统具有更高的可靠性;另一方面,本研究中重新研究提出的智能检测算法与硬件结构相匹配,大幅改善了整体系统性能。
1.1 硬件结构
该智能防盗拍系统的硬件部分主要包括3个部分:近红外光源模块、检测器模块、图像处理器模块。它们之间的相互关系如图1所示。
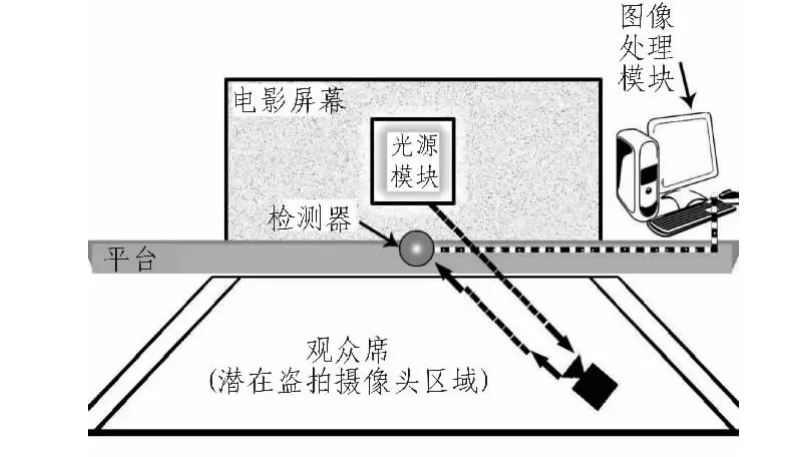
图1 硬件模块结构Fig.1 Hardware module structure
具体而言,近红外光源模块隐蔽地置于电影屏幕中央,透过屏幕将近红外光线向观众席方向投射;系统初始采用的光源模块为一个矩形的发光二极管阵列,产生波长为920纳米的不可见光线,对电影屏幕上的影像效果以及人眼的视觉均无影响,具有很强的隐蔽性;置于其下的检测器为一个PTZ(pan-tilt-zoom)云台摄像机,可以在水平和垂直的两个轴上平移。它被隐藏在平台后方,只有镜头与外部环境相通,实时对观众席区域的场景进行扫描。检测器镜头上装有滤波装置,滤去了系统近红外光源以外波长的光线。摄像头的每个位姿都被映射到了观众席中的一个区域,用于通过该映射关系确定盗拍摄像头的具体位置,并能同时针对距离目标区域的远近,通过光学变焦对该区域进行缩放,以保证所有采集的图像具有相似的比例;此外,图像处理模块和检测器耦合,对检测器进行控制,处理检测器捕捉的场景,并通过检测算法对该信息进行计算分析。在以下描述的检测原理中,这些硬件模块相互配合运作,分别提供数据和待检模式,采集数据,处理数据,最终通过一体化的系统以实现其功能。
1.2 检测原理
系统的检测原理利用了摄像机镜头的光学特性以及回射原理[8]。该检测原理和名为“猫眼”的道路反光安全装置类似,将入射光线沿原方向返射回去,从而产生高光。
本系统中,首先,光源模块将光线向观众席方向投射,当光线到达摄像头表面时,便在摄像头镜头上产生回射,回射光线集中而无明显散射,随后被光源模块下方的检测器接收,如图1中所示。如此,在检测器所采集的场景图像中,倘若有摄像头镜头存在,图像中则会有相应的高光部分。此后,在图像处理器的控制下,检测器逐行扫描整个观众席,并将记录的图像传入图像处理器进行分析。当图像处理器检测到图像中的高光[9],并进一步确认为摄像头镜头高光,便产生报警,并记录对应观众席的位置。光源模块在镜头上产生的高光模式成为了整个检测的初始依据,作为待测数据被检测器采集,被图像处理器辨识。光源模块的结构和性能直接影响该高光模式的大小、亮度、形状等特征;图像处理器的检测算法则决定了对该高光模式检测的准确度、区分度,从而影响报警的敏感性和正确率。
2 实验数据集统计分析
2.1 数据集的构成
系统产生报警的同时也会将相应的场景信息记录下来,这样非法摄像头以及其上的高光模式便被以图像的方式保存了下来。本研究将系统在采用旧算法进行测试或实际应用中采集的318张图像组成了一个数据集,作为实验用数据和系统性能评价的参考。若用一个318行1列的元胞数组D318×1来表示该资料集,则 D318×1(n)(n=1,2,……,318)表示其中的一张图像。由于系统采用近红外光源模块,检测器采集的图片也屏蔽了其他波段的光照,所以所有的数据均为红外图像,只有一个通道保存各像素的强度值信息,若用矩阵I480×640的形式表示 D318×1(n)中所有像素的强度值,则 D318×1={X1,X2,X3,……,X318}T。当光源模块在非法摄像头上产生了反射高光,高光形成特定的模式,具有其独特的特征(例如:高光的数量、大小、形状、强度值等)。对于此高光模式的检测和识别便可作为判定摄像头存在与否的依据。
对于数据集中的部分图像,塑料水瓶等物体上的高光模式在系统采用旧算法分析处理后被误认为是镜头高光,从而产生了假报警。在本文以后的内容中,把报警图像中含有非法摄像头的情况称为真阳性,而把导致误报的图像记录和结果数据称为假阳性。为了寻求提高真阳性率,降低假阳性率的方法,数据集中的318张图像被分为A、B两类:集合A中只含有真阳性数据,并人工标记Xn以相应的标签Yn=1;集合B中只含有假阳性数据,并人工标记Xn以相应的标签Yn=0。于是数据集便被转化为了318行2列的元胞数组 D318×2={X1,X2,X3,……,X318;Y1,Y2,Y3,……,Y318}T;分类后,集合A中共有77幅图像,集合B中共有241幅图像,亦即 A77×2∈D318×2,B241×2∈D318×2。 有了此数据集,监督式学习等模式识别及分类方法便有了数据基础,也为算法性能的测试提供了依据。
2.2 数据集分析和人工特征选取
对数据集进行分析主要有以下几个目的:1)对图像的噪声等级进行分析,必要时进行降噪处理,以免大量异常值影响算法性能;2)对摄像头镜头高光的模式进行描述,以便人工提取有效特征,作为分类的依据;3)对高光背景信息进行分析,尽可能多的捕获可用特征信息;4)对假阳性图像进行分析,找出产生假报警的原因,以便降低假报警率。
经过分析,对结果归纳如下:1)图像噪声等级较高,需要对图像进行降噪等预处理;2)摄像头镜头反射高光大小不一,排列方向各异,形状也由于边缘亮度值衰减而导致不规律,无法采用回归算法进行形状拟合;同一镜头上由于摄像头多组镜面的互反射导致镜头上出现一个(当多个高光点重合时)或多个高光点;多个高光点两两间距和单一高光点的大小被约束在一定范围内,该统计如图2中曲线图所示;3)镜头上除高光点外的背景像素较暗,对其亮度值统计信息如图2中柱状图所示;4)假报警主要由于塑料瓶、首饰、座椅扶手、衣着装饰、眼镜、皮包等反射物件触发。
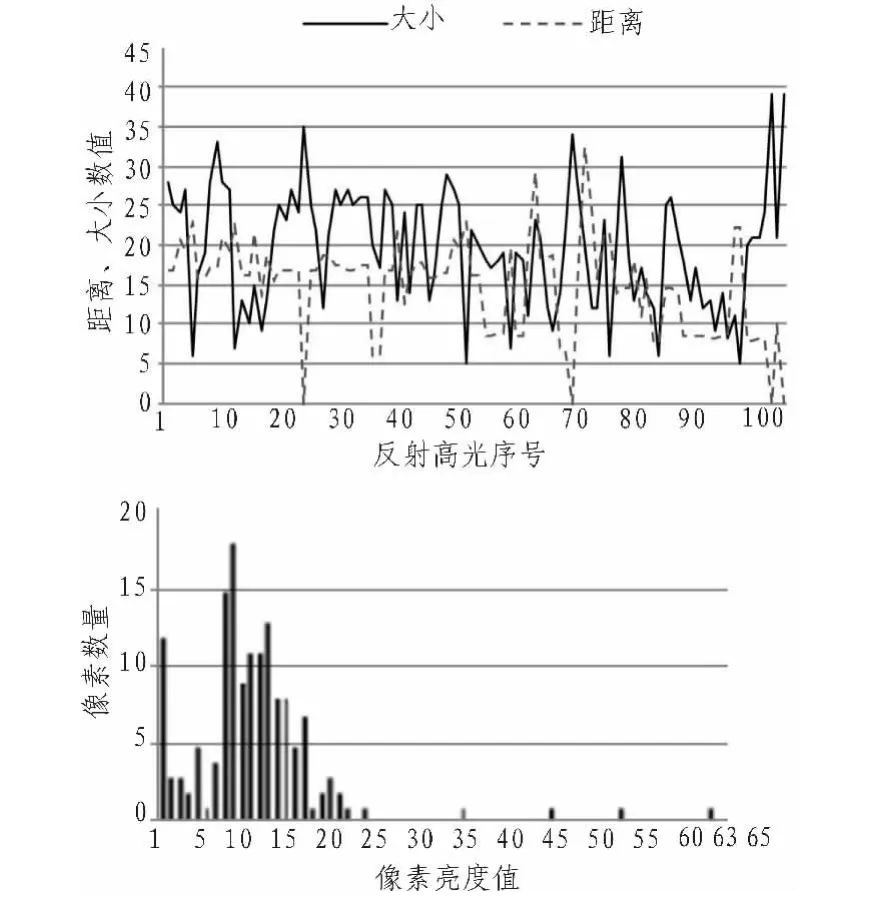
图2 高光点特征统计Fig.2 Specularity feature statistics
由此分析可知,镜头高光大小在5至40像素之间,高光点间距在33像素以内,高光点背景像素多分布在0至25像素之间。于是人工选取镜头高光特征为:高光点大小、高光点两两间距、高光点背景统计直方图。
3 算法设计及结果分析
3.1 静态模式层级检测算法
通过将人工选取的特征进行整合,以特征的约束条件以及特征之间的关联为基础,本文针对每个单幅图像(图像中的镜头高光模式为静态模式)设计层级检测算法如图3所示。
首先,算法读入图像处理器中接收的图像,在预处理阶段进行降噪处理,通过中值滤波、低通滤波、图像平均的结合降低图像噪声水平,大量消除异常值的负面影响;基于对数据集的分析,选取合适的阈值,对“过大”、“过小”高光点进行定义,在亮度值方面,统计背景像素异常值数目,对“过亮”背景区域进行定义,针对成对高光点,对“过远”间距进行定义;对图像分别转化成二值图、灰度图储存备用。之后,算法在二值图中对高光点进行检测,移除“过大”高光点,移除处于图像边缘的高光点。对于剩下的高光点,算法通过两次设定不同阈值,将同一原始图像转化成两幅二值图,并对齐进行比较,以移除物体边缘上的高光区域。然后,算法利用高光点背景像素信息,移除处于“过亮”背景上存在的高光点区域;算法计算高光点两两间距,并对非成对出现的高光点进行更严格的背景复检,最终综合各监测情况给出是否产生报警的判定。最终统计结果显示,在真阳性集合A77×2中,所有的77幅图像都被成功地检测出含有非法摄像头,准确率100%;在假阳性集合B241×2中,241幅图像中的215幅图像被成功的判定为假阳性,有效性89.21%。
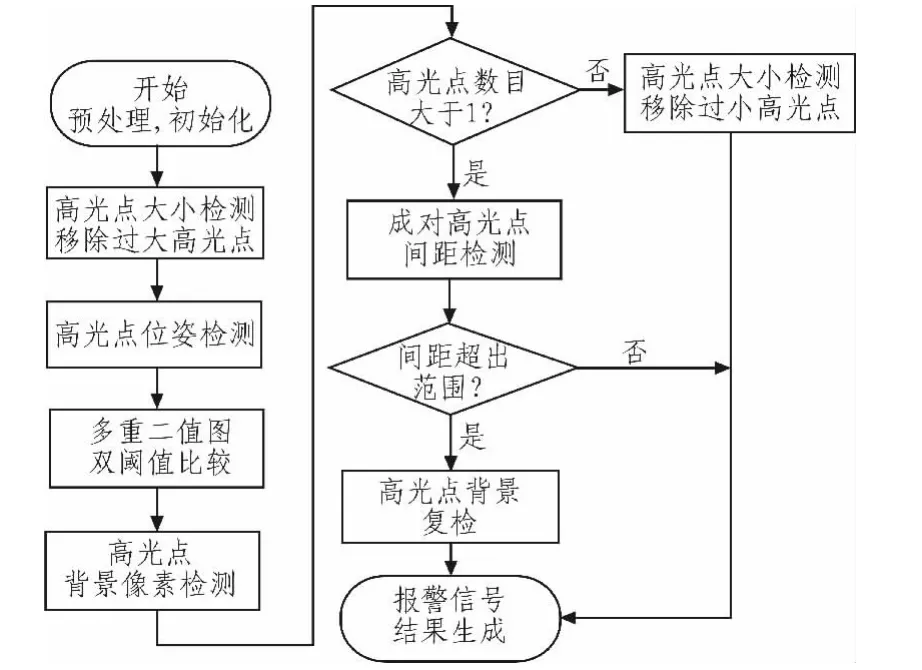
图3 层级检测算法流程图Fig.3 Flowchart for the cascade detection algorithm
此流程中的背景信息被单独提取,用于图像直方图比较,以提供另一个判定是否报警的依据。在这个过程中,每张待检图像中的背景信息都与数据集中所有的图像背景信息的直方图进行比较,计算之间的欧几里得距离,之后统计所有欧氏距离的结果,计算结果中异常值所占比例,从而输出该背景为摄像头高光背景的概率,以表征摄像头镜头高光存在的百分比。测试中,一个随机真阳性值所生成的判定结果如图4所示。
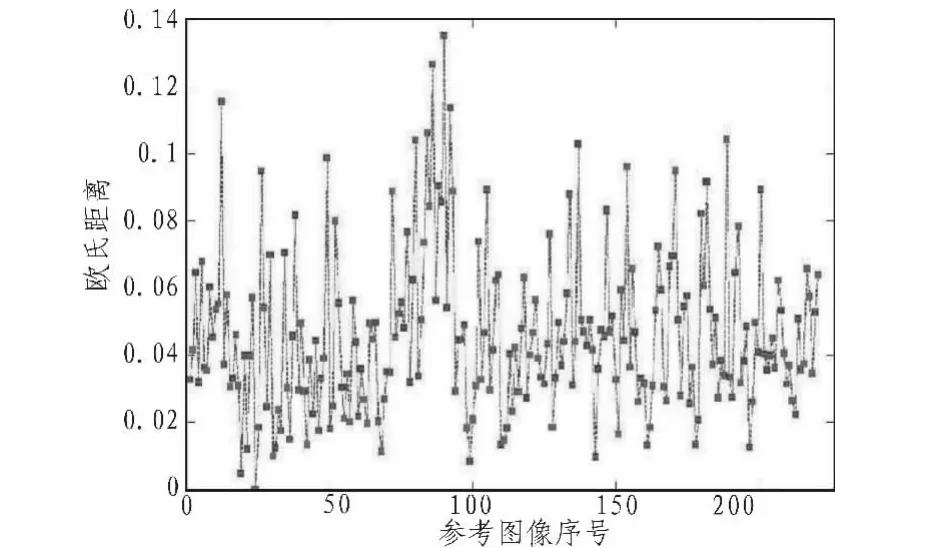
图4 待测图与参考图欧氏距离计算Fig.4 Euclideandistancebetweenaqueryimageandthereferenceimages
欧氏距离计算在0.1以上的值被定位异常值,输出概率按照probability=100-α×outlier_percent计算。其中系数α根据此数据集的大小,在本测试中选取为5。于是该待检图像背景信息为真阳性的概率通过计算为81.9005%,表示此背景图像处于摄像头镜头内部的可能性极大。此方法对于总体的报警决策有着辅助作用,在层级检测算法外添加了概率性判断,使得结果更加客观和具体。
3.2 主成分分析和K最近邻法分析
主成分分析[10]作为一种对数据集进行分析和简化的方法,通过正交变换,将数据映射到新坐标系中,同时保留了数据集的主要特征,而去除对方差影响不大的部分,从而降低数据的维数,简化后续运算的复杂性。K最近邻法分析[11-12]是一个机器学习分类方法。该算法寻找待检样本在参考样本集中的最相似的K个样本,倘若K个样本中的大多数样本属于某一类别,则判定该待检样本也属于同一类别。通过该方法进行分类,即可将待测的静态高光模式在真阳性、假阳性两类中进行判定,从而又作为一种增加报警输出准确性的依据。
由于这两种方法应用广泛,在各个领域都有成熟的应用,本文在此对两种方法的概念不再赘述,但对选择并结合这两种方法的原因做出如下解释:首先,K最近邻算法简单明了,易于应用,适合嵌入本文中的静态模式层级检测算法中;其次,K最近邻算法需要的数据集已被整理并赋予标签,在第二章中做出了介绍;第三,层级算法已经对高光点的中心、面积、背景等参数和特征进行了计算,易于提取出来作为K最近邻算法的训练样本。最后,K最近邻法需要计算待测样本与每个参考样本的欧氏距离,当数据维数高,数据集较大时,便需要大量的计算时间,不具有良好的实时性。这是限制该算法实用性的最大局限所在。而主成分分析方法降低数据的维数而对数据本身特征影响不大,将数据进行极大的压缩,减少了大量的计算时间,使得K最近邻算法可以在实时系统中进行应用。
提取的训练集样本以高光点群集的中心图像的中心,根据高光点的大小决定图像半径。提取出的训练集被分为真阳性、假阳性两类,各85个样本。用全部170个样本作为训练样本首先应用主成分分析方法进行数据降维,然后再用K最近法进行分类运算,最终将待检样本归为真阳性或假阳性,从而影响报警决策信号。为了使得结果客观而保证训练集的稠度,算法中采用交叉验证,从训练集中依次选取一个样本作为待检数据,其他作为训练数据,通过生成的结果和数据标签的对比判断结果的正误。为了使算法生成的结果准确度最高,同时保证效率最高,于是对主成分维数N以及邻近样本数量K需要进行合理的选择。本文对在不同的N值以及不同K值的情况下对算法性能进行了统计测试,计算K近邻算法在数据保留N个主元的情况下的准确性,生成的结果如图5所示。
测试结果表示,在主元数目固定时,最近邻数目为3使得算法有最高准确度;另一方面,最近邻数目固定时,主元数目为40时,继续增加主元数目对算法准确度无明显影响。所以应用算法将选取N=40,K=3以保证系统的快速性和准确性,该算法对假阳性的误判进一步成功降低了73.94%。
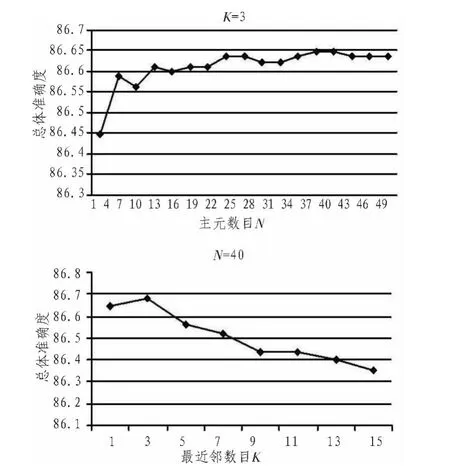
图5 算法准确度与选取参数关系Fig.5 Algorithm accuracy dependent on selected parameters
4 小规模模拟实验
以上针对单一图像中静态模式的检测和分析算法有着理想的效果,然而仍有部分假阳性结果因为极其类似真阳性高光模式,也因为静态模式检测的局限性,不能被区分出来,从而产生假报警;同时,正方形光源模块产生的镜头高光因其强度值从中心向四周放射性衰减,进而高光区域由正方形退化成不规则矩形或圆形,和其他反射高光不易区分。本章中介绍的小规模模拟实验便旨在改善和解决这两个问题,使得硬件结构能够配合软件算法,同时改善系统的整体性能。
实验中采用的装置主要由8个高亮LED构成,每4个LED被等间距地固定在一个条形金属上,两个条形金属可以组合成不同的形状(一字型、十字形等),模拟出不同形状的光源。实验中,此装置由电压源供电,朝向一摄像头(模拟非法摄像头),摄像头上的高光模式被记录下来,用于比较分析和计算。当两个条形光源排成一字型轮流照明时,非法摄像头上的高光模式在不同时刻的同一位置被记录下来,经过差值运算,其结果如图6所示。
为了便于观察,图6对原结果进行了反相处理。两幅不同时刻记录的图像对应左右条形光源的照明,它们的差值被映射到了灰度颜色表,颜色越暗代表差值越大。图像中间部分为非法摄像头,其上最暗的部分即为一字型光源产生的动态高光模式,该差值最大值为246(差值范围为0-255);其左右两侧及下侧分别为塑料瓶、塑料袋,其上最暗的部分的差值最大值为185;其余白色或灰度较低的部分则代表更小的差值。
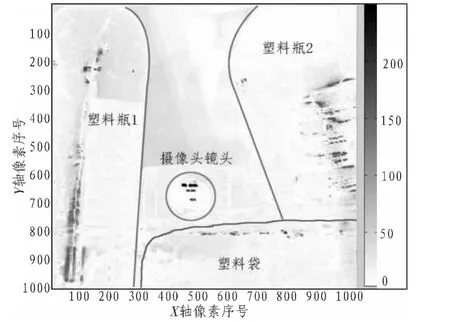
图6 模拟实验左右轮换照明下的高光模式差值Fig.6 Subtraction of specularities in alternating illumination in the simulation experiment
据实验结果反映,摄像头镜头在动态光源照射下产生的高光模式差异较大,其他反射物体对动态光源敏感度较低。如此,通过检测不同等级的差值,即可将动态模式进行区分,假阳性值便能被进一步地排除。
5 结束语
本文介绍了一种新型的、智能的、有效的摄像头检测系统。该系统利用计算机视觉技术,对暗环境中的隐匿摄像头进行检测,并产生报警。通过全面的、系统的介绍,本文内容涵盖了系统基于回射的检测原理,针对该原理设计的硬件部分和算法设计的介绍,数据集的建立和使用,实验的结果和系统性能分析等多个方面,更对结果进行了统计,并基于此对系统的潜力进行了展望。该改善的系统与原系统相比保留了100%的敏感性,准确性在层级检测算法应用下提高了89.21%,在机器学习算法下提高了73.94%。同时,这一系统提出了通过定向人工光照弥补暗环境光照不足的一种方法,并对反射高光这一图像处理中的重点、难点进行分析,制造并利用反射高光特征,进行物体检测和分类。系统采用的算法模块化,可融合性强,和系统硬件相互配合达到了高效、智能检测的目的。
[1]BAI J,WALDFOGEL,J.Movie piracy and sales displacement in two samples of Chinese consumers[J].Information Economics and Policy,2012,24(3-4):187-196.
[2]MALIN, J,FOWERS, B J.Adolescent self-control and music and movie piracy[J].Computers in Human Behavior, 2009,25:718-722.
[3]YAMAZAKI S,NAKANE H,TANAKA A.Basic analysis of a metal detector[J].IEEE Transactions on Instrumentation and Measurement,2002,51(4):810-814.
[4]TKACH V N,SHCHERBAKOV G N.Use of non-linear junction detectors to ensure the safety of IED search[M]//SCHUBERT H,KUZNETSOV A.Detection and Disposal of Improvised Explosives, Netherlands:Springer,2006:237-239.
[5]TRUONG K N,PATEL S N,SUMMET J W,et al.Preventing camera recording by designing a capture-resistant environment:Proceedings of the 7th international conference on Ubiquitous Computing, Tokyo, 2005[C].Berlin-Heidelberg:Springer,2005.
[6]季盛强,纪海英,辛晓虎,等.几种特征选择方法在局部放电模式识别中的应用[J].陕西电力,2011(11):1-4,9.
JI Sheng-qiang,JI Hai-ying,XIN Xiao-hu,et al.Application of Several Feature Selection Methods in Partial Discharge Pattern Recognition[J].Shaanxi Electric Power,2011(11):1-4,9.
[7]MAHDAVI M,MAHDAVI H,FARSI F.System and method for video recording device detection:US,20120128330[EB/OL].(2012-05-24)[2012-11-15].http://www.faqs.org/patents/app/20120128330
[8]GROSGES T.Retro-reflection of glass beads for traffic road stripe paints[J].Optical Materials,2008,30(10):1549-1554.
[9]ZISSERMAN A,GIBLIN P,BLAKE A.The information available to a moving observer from specularities[J].Image and Vision Computing,2002,7(1):38-42.
[10]ABDI H,WILLIAMS L J.Principal component analysis[J].Wiley Interdisciplinary Reviews:Computational Statistics,2010,2(4):433-459.
[11]MAGNUSSEN S,TOMPPO E,MCROBERTS R E.A modelassisted k-nearest neighbour approach to remove extrapolation bias[J].Scandinavian Journal of Forest Research,2010,25(2):174-184.
[12]韩学军,邓艳秋,张全厚,等.基于改进小生境粒子群优化算法的电力系统无功优化研究[J].陕西电力,2012(12):36-38,46.
HAN Xue-jun,DENG Yan-qiu,ZHANG Quan-hou,etal.Research on improved niche particle swarm algorithm for reactive power optimization[J].Shaanxi Electric Power,2012(12):36-38,46.
猜你喜欢
中国交通信息化(2022年9期)2022-10-28
汽车工程师(2021年12期)2022-01-18
玩具世界(2021年5期)2021-03-08
NBA特刊(2018年10期)2018-06-02
家庭影院技术(2017年12期)2017-02-06
汽车维修与保养(2015年8期)2015-04-17
中国塑料(2014年2期)2014-10-17
网络与信息(2009年8期)2009-05-10
中国校外教育(上旬)(2009年1期)2009-02-07
中学生博览(2009年8期)2009-01-14