
托盘自动供给装置的设计及研究
2013-08-16 07:25赵海宝秦宝荣韩立光王淑花
机械设计与制造工程 2013年2期
赵海宝,秦宝荣,韩立光,王淑花
(特种装备制造与先进加工技术教育部/浙江省重点实验室(浙江工业大学),浙江杭州 310014)
目前,国家规定的托盘是指由木、塑或钢等材料构成的单层或双层使用平托盘。目前,对于自动存放和供给托盘的装置,尤其是对特定尺寸的托盘进行存放和供给的装置研究较少,现有通用设备存在生产效率低、故障率较高等问题。
1 物料托盘介绍及供给要求
文中托盘指的是具有符合国家规定的外部尺寸,适用于搬运车、叉车和其他装卸设备的木托盘。托盘平面公称外廓尺寸为1 200mm×1 200mm,叉孔尺寸为300mm×80mm。
自动供给装置需要存放18个托盘,满足托盘批量上料的要求,从而减少工作量,提高工作效率。供给装置每隔36s自动送出一个托盘,由输送线送入码垛机等装卸装置。
2 系统方案设计
为了获得托盘进料效率高、整体结构尺寸小、各部件摩擦损耗小的自动供给装置,对几个方案进行了对比,得到的最佳方案[1]的整体结构模型如图1所示。
物料由叉车批量送入托盘自动供给系统,由伺服电机及减速器带动上下提升系统垂直运动,由气缸带动气缸杆水平运动,从而实现两个自由度上的运动,通过控制两个动力源的运动,实现将托盘提升,留下最下面一个托盘的动作功能,再由输送线将一个最下面的一个托盘送出本装置,实现逐次送出一个托盘的功能。
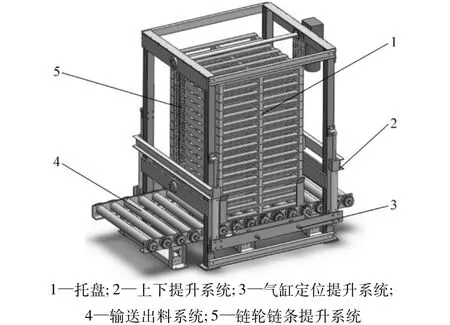
图1 初步模型的整体结构模型图
3 托盘自动供给装置的运动与受力分析
3.1 运动初始设置
托盘自动供给装置实现托盘逐个送出的动作功能,各个动作如图2所示。
为满足生产线总体结构方案和动作方案要求,使得托盘自动供给装置动作连贯,并且满足生产线总体方案要求,保证工程上有一定时间余量,实际一个托盘输出时间设计为30s,因此设定每30s完成一个托盘的输出。初始设置每个动作完成的时间为2s。
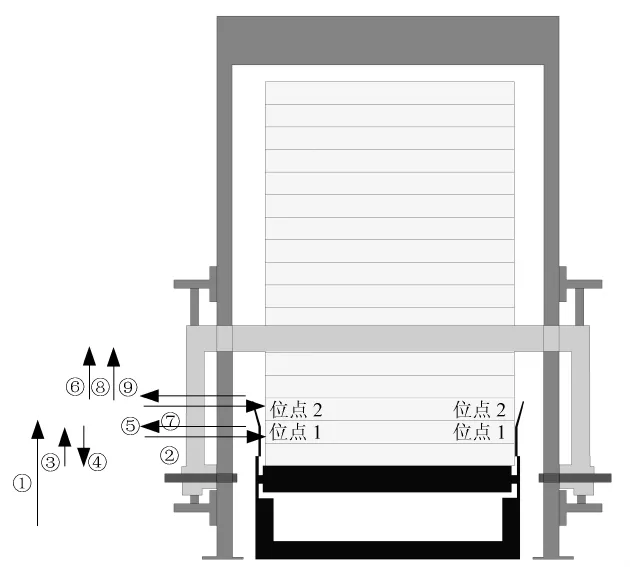
图2 单层砌块码垛运动过程简图
具体动作:升降电机通过链轮链条带动上下机构升起,到达与第二个托盘平齐的位置,完成动作①;气缸伸出,将气缸杆伸入第二个托盘中间孔(位点1),完成动作②;升降电机再次提升上下机构,使得第二个托盘及上方托盘一同升起,脱离最底下的托盘,完成动作③;最底下托盘在输送线摩擦力的作用下被送出;升降电机降下上下机构,使得第二个托盘与输送线接触,完成动作④;气缸缩回,气缸杆与第二个托盘(位点1)分离,完成动作⑤;升降电机提升上下机构,使得气缸与第三个托盘(位点2)平齐,完成动作⑥;气缸伸出,气缸杆进入第三个托盘(位点3),完成动作⑦;升降电机提升上下机构,使得第三个及上方托盘与第二个托盘分离,完成动作⑧;第二个托盘在输送线摩擦力作用下被送出,完成第二个托盘的送出;气缸缩回,完成动作⑨;以此类推,逐个送出托盘。
3.2 运动仿真与受力分析
对托盘自动供给装置的主要关节添加旋转驱动和位移驱动[2],将仿真时间设置为30s,上下驱动函数位移曲线如图3,4所示,负载力曲线如图5所示。
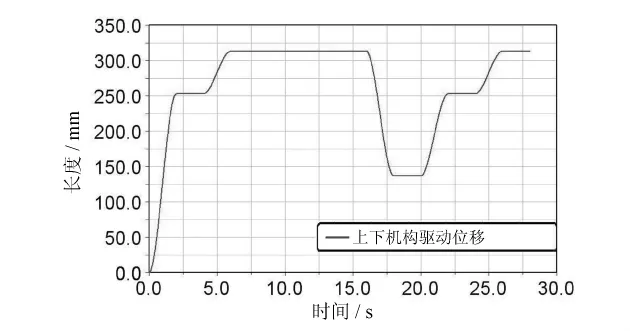
图3 上下机构升降驱动位移曲线图
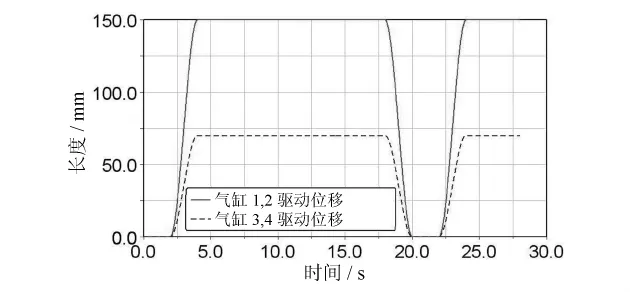
图4 气缸驱动位移曲线图
上下机构的位移最大值为320mm,两个方向的气缸驱动机构的位移最大值分别为150mm和60mm,各机构驱动时位移设置平稳,初步判断位移设置合理。
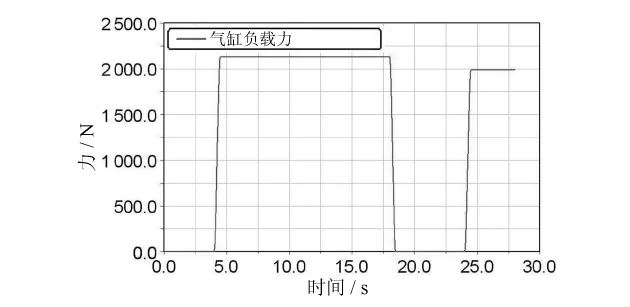
图5 4个气缸负载力函数曲线图
负载力为托盘重力产生,最大压力为2 200N。
3.3 各部件运动仿真结果
从图6中可以看出,最大速度为1 620mm/s,位移总体和谐,位移比较稳定。从图7中可以看出,最大速度为180mm/s,各部件的速度较小,没有突变速度和速度特别大的部件,时间分配比较合理[3]。
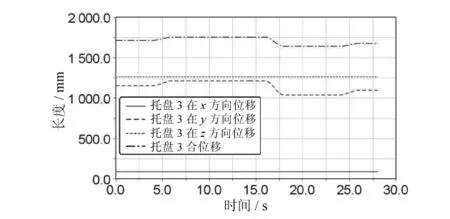
图6 托盘3位移曲线图
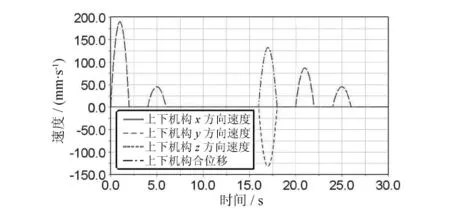
图7 上下构件在x,y,z方向上速度及合速度曲线图
从图8可以得出,驱动上下机构上下运动的驱动力最大需要15 281.2N,即上下机构上的驱动电机需要输出最大15 281.2N的驱动力,同时,链轮链条及链条连接件等传递构件也要满足此工况的条件。
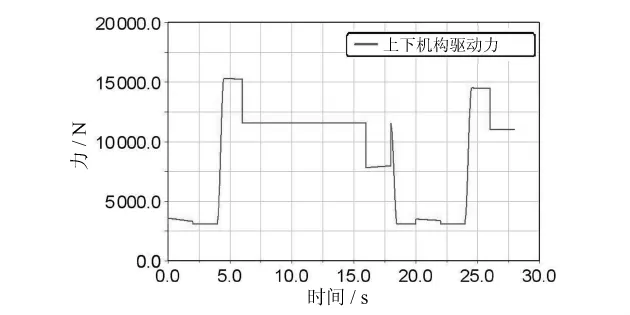
图8 上下机构驱动力曲线图
从图9可以得出,气缸1,2受到的最大反作用力为2 144.0N,最大扭矩为43 031.5 N·mm;气缸3,4受到的最大反作用力为2 140.0N,最大扭矩为71 139.7N·mm。
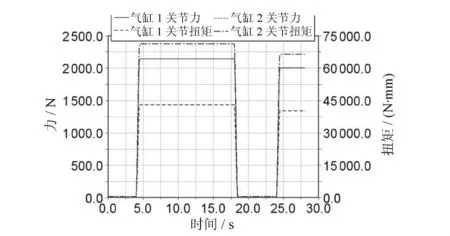
图9 气缸关节力和扭矩曲线图
几个驱动机构的驱动力曲线图及关节力和扭矩曲线图为选择电机、选择气缸、计算电机轴、选择链轮链条和同步带等驱动机构和力传递机构提供了依据,节约了计算成本,缩短了设计周期[4]。仿真的结果证明,托盘自动供给装置各执行机构的运动范围能满足工作的需求。对各机构的位移、速度、角速度、角加速度的分析表明,本装置的总体速度合理,加速度稳定,总体的运动性能良好,整体变化量均在许可范围内,证明了此装置设计的可行性。
4 托盘自动供给装置的静动态特性分析
4.1 静态特性分析
选用Workbench中Static Structure(ANSYS)模块进一步建立有限元模型。首先定义材料属性,各个轴和气缸的材料为45钢,其他零件的材料都是Q235-B;然后在控制各部分网格尺寸的基础上,用Hex-Dominant网格划分方法划分网格[5],码垛机网格化后的模型如图10所示。

图10 码垛机有限元模型
上下机构与导块为摩擦接触,计算方法采用拉格朗日法,设定为非对称行为,摩擦系数为0.2。
总平均应力云图和总变形云图如图11,12所示,分析可知:(1)该托盘库在静力作用下变形较小,气缸伸出杆的变形最大,最大值为1.540 4mm,可以作为选择气缸的依据。(2)该托盘库的最大应力出现在气缸与上下机构的连接处,最大值为63.274MPa,远远低于材料的极限应力,结果符合要求。
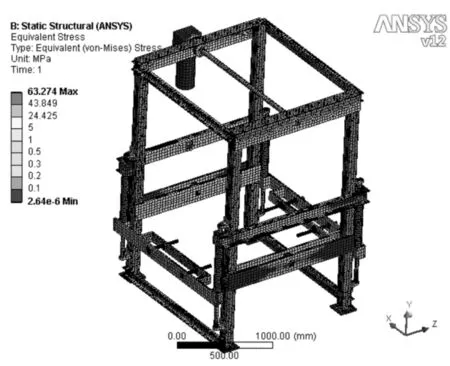
图11 平均应力云图
4.2 动态特性分析
在ANSYS12.0 Workbench平台中,利用Modal(ANSYS)模块求解得到该装置的接触条件为各部件之间固定接触[6],约束条件为支架下底面位移固定约束,模态的分析阶数为6阶。有限元模态分析计算结果见表1。
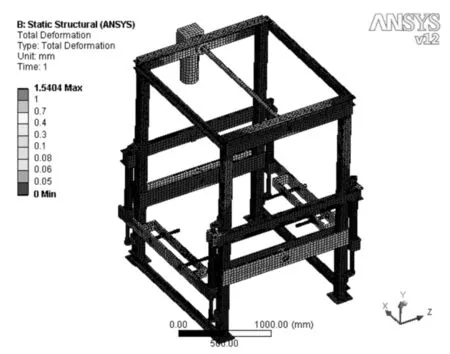
图12 总变形云图
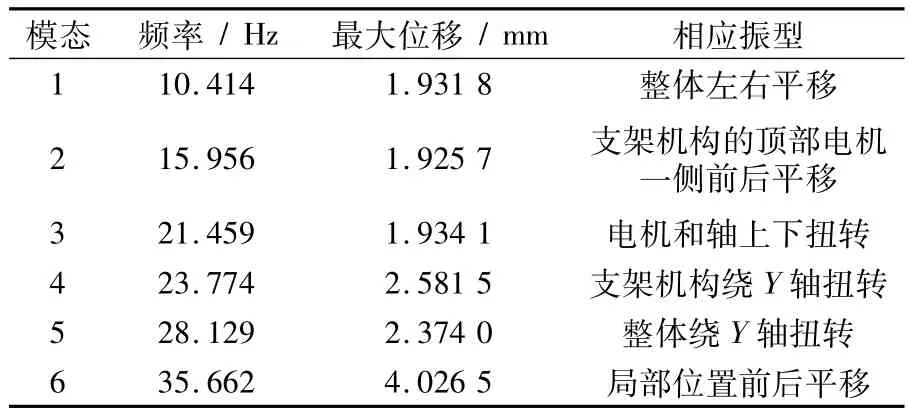
表1 固有频率及相应振型
第一阶模态振型如图13所示。
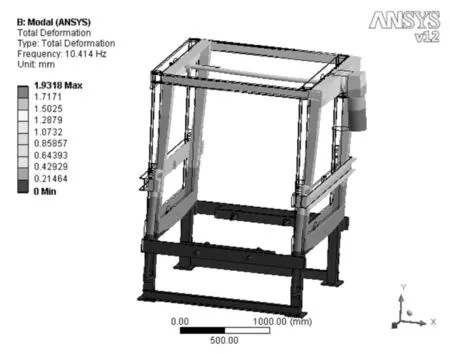
图13 一阶振型
分析可知,托盘自动供给装置的不同模态的振型各不相同,整体不仅存在左右、前后平移,还存在扭转移动,这些振动会削弱机构的强度和刚度,影响托盘出料位置精度。由于两个伺服电机的输出转速为18r/min(0.3Hz)和12r/min(0.2Hz),托盘自动供给装置的工作频率为28s/次(0.467Hz),工作频率远远低于共振频率,从而证明前面设计的运动方案不会在装置工作时引起共振,动态特性良好。
5 结束语
本文设计了一种托盘自动供给装置,同时通过建立三维结构模型解决了传统方案设计中的模糊性,提出了运动部件动作时间分配及改进的方法,以及静动态特性的验证方法。本文研究内容涉及结构设计的整个过程,包括整体方案设计,运动方案设计与优化,静动态特性分析,为今后工程项目的整套结构设计提供了更加快捷的方法。分析结果为整机设计过程中需要的各个参数提供了参考数据,从而能够缩短设计周期。为进一步减小设计误差,建议通过对分析数据和样机的实际工作参数进行对比,寻找误差来源,提出相应的缩小误差的方法。
[1] 濮良贵,纪名刚.机械设计[M].北京:高等教育出版社,2001.
[2] Mills J K.Dynamic modeling of a flexible-link planar parallel platform using a sub-structuring approach[J].Mechanism and Machine Theory,2006,41(6):671-687.
[3] 闫华,汪木兰,冯永伟,等.基于ADAMS的垂直弹跳机器人动力学仿真[J].中国制造业信息化,2011,40(11):33-36.
[4] 孙桓,陈作模,葛文杰.机械原理[M].北京:高等教育出版社,2010.
[5] 浦广益.ANSYS Workbench 12基础教程与实例详解[M].北京:中国水利水电出版社,2010.
[6] 徐凯,尹志宏,高军,等.机床床身性能分析及方案优选[J].中国制造业信息化,2012,41(9):30-33.
猜你喜欢
矿山安全信息(2021年21期)2021-07-04
装备制造技术(2021年1期)2021-05-21
矿山安全信息(2020年37期)2020-12-26
矿山安全信息(2020年2期)2020-03-05
矿山安全信息(2020年3期)2020-03-04
模具制造(2019年4期)2019-06-24
四川党的建设(2016年6期)2016-12-28
群众(2016年10期)2016-10-14
军营文化天地(2016年10期)2016-06-15
当代经济(2016年26期)2016-06-15
