电电混合燃料电池电动汽车能量管理策略
2013-08-15 03:36聂玺张辉
电气传动 2013年10期
聂玺 ,张辉
(1.西安理工大学电气工程系,陕西 西安 710048;2.西安交通大学电力设备电气绝缘国家重点实验室,陕西 西安 710049)
1 引言
作为近、中期的辅助性技术,替代能源汽车技术的节能减排效果有限[1]。燃料电池电动汽车(FCEV)是一种高效、清洁的车型,具有几乎无NOx、SOx和粉尘排放,CO和VOC的排放量也很低的特点[2],但FCEV依然存在一些问题。1)燃料电池电动汽车单以燃料电池作为动力源时,所有负荷都由它承担,电堆工况变化剧烈,性能衰退快[3]。2)燃料电池的能量不能反向流动,无法回收制动能量,需设置可以储存能量的环节。3)燃料电池在负载动态变化时电压变化大,使用时须在燃料电池与负载之间加入DC/DC变换器。因此,现多以燃料电池作为主动力源,增加蓄电池组或超级电容器作为辅助动力源。
本文以荣威E50为原型车,对汽车动力系统参数进行计算;采用功率跟随思想设计燃料电池电动汽车的能量管理策略,最后用Matlab建立仿真模型进行仿真验证。
2 动力系统参数计算
电电混合燃料电池电动汽车系统结构见图1。原型车为上海荣威公司生产的荣威E50纯电动汽车,整车具体参数为:空气阻力系数CD=0.3,迎风面积A=1.949 m2,轮胎滚动半径R=0.27 m,最高车速130 km/h,滚动阻力系数f=0.01,轴距2.305 m,车重1080 kg,最大爬坡度20%。

图1 电电混合燃料电池电动汽车系统结构图Fig.1 System configuration of electricityelectri city hybrid FCEV
首先,根据汽车理论,以最高车速vmax来确定电机的最大功率Pmax1:

式中:η为传动效率;f为滚动阻力系数;CD为空气阻力系数;A为迎风面积。
考虑到乘客和载重,整车质量取m=1300 kg,最高车速取vmax=130 km/h,传动效率η=0.9,将参数带入式(1)可得Pmax1≈24 kW。
其次,根据最大爬坡度αmax来确定电机的最大功率Pmax2:
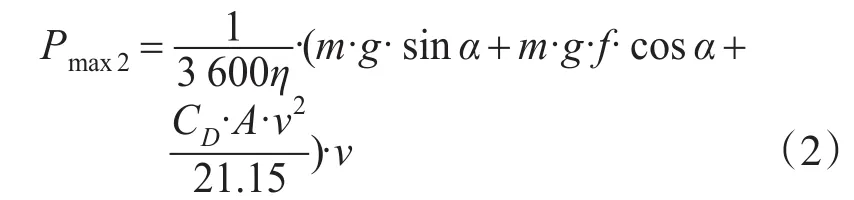
假定爬坡时车速为50 km/h,将参数带入式(2)可得Pmax2≈42 kW。
电机的最大功率必须满足P≥max{Pmax1,因此选取1台最大功率为42 kW,额定功率25 kW的电机作为燃料电池汽车电机。在城市循环工况下,燃料电池电动汽车的混合度为50%时,氢气消耗率最低[2],考虑到变换器的效率(ηDC-DC=0.95),燃料电池的最大输出功率选为22 kW,额定功率18 kW。
超级电容器组不仅要满足汽车启动、加速、爬坡时的功率需求,还需满足制动时吸收回馈能量的需求。即满足下式:

式中:v为汽车制动速度;C为超级电容器组额定容量;η为传动效率。
利用超级电容放电功率等于输出功率与内阻RES上消耗功率之和这一功率平衡关系,可由下式确定超级电容规模和数量:

式中:m为超级电容器组串联数目;n为超级电容器并联组数;P0为系统要求的输出功率;t为超级电容器组持续输出功率时间;ηC-CD为超级电容器组和DC/DC变换器的效率;RES为单体超级电容器的内阻;K1为超级电容器组均一系数;C为单体超级电容器的额定容量;UCN为单体超级电容器额定工作电压。
由式(3)和式(4)可确定仿真用超级电容器组由10000 F/2.7 V超级电容器10并50串构成。
3 混合动力系统能量管理策略设计
车辆正常行驶时,超级电容器的电荷状态(SOC)在最低设定值与最高设定值之间,燃料电池应在某一设定的范围内输出功率,超级电容器不工作;超级电容器的SOC低于最低设定值时,燃料电池输出功率不仅满足车辆驱动,还要为超级电容器充电,直到超级电容器SOC值达到最高设定值时,充电停止;车辆启动时,燃料电池预热,超级电容器提供启动所需的能量;车辆加速或爬坡时,燃料电池和超级电容器共同提供能量。车辆制动时,超级电容器吸收回馈能量[4-5]。
超级电容器组SOC最低设定值必须满足超级电容器剩余的能量能够提供汽车一次最大加速所需的能量,最高设定值必须满足能够完全吸收汽车最大速度制动所产生的能量[6]。
参考国际通用城市道路循环UDDS(urban dynamometerdriving schedule)工况的数据[7],在该工况下汽车最高车速为91 km/h,平均车速为31 km/h,启停和车速低于20 km/h的时间约占工况总时间的30%。

式(5)为汽车最大加速时电机功率公式,取汽车最大加速末速度vf=91 km/h,百米加速时间t=16 s,通过式(3)和式(5)确定超级电容器组SOC工作区间为0.4~0.8。
通过式(1)计算,车速为20 km/h时电机消耗功率为0.85 kW,超级电容可单独提供能量。因此设置在汽车时速低于20 km/h时由超级电容单独工作,避免燃料电池的频繁开关。
同样通过式(1)可算出最高车速下电机消耗的功率为10 kW,在燃料电池的额定功率范围内。因此,正常行驶时燃料电池提供能量,当加速或爬坡电机需求功率大于燃料电池额定功率时,再由超级电容器和燃料电池共同提供能量。
根据上述思想,设计超级电容器和燃料电池的控制规则,详见表1与表2。

表1 燃料电池工作状态判断Tab.1 State judgment of the fuelcell

表2 超级电容器工作状态判断Tab.2 State judgment of the supercapacitor
通过表1、表2可看出,超级电容器和燃料电池共有3种工作状态:超级电容器单独工作、燃料电池单独工作、超级电容器和燃料电池共同工作。当两者共同工作时,由于两变换器的输出阻抗存在差异,不能够平均分担负载电流,引起动力系统的输出功率达不到所设计的最大功率。可考虑加入均流控制,来解决功率分配不均的问题。
4 均流控制技术
常见的均流方法有下垂法、主从设置法、平均电流自动均流法、最大电流自动均流法等。其中主从设置法适用于采用电流型控制的并联开关电源系统中,且均流精度高[8];缺点是主从模块之间需要通讯联系,如果并联模块较多系统就很复杂。本文只有2个电源模块,可以使用该方法进行均流。
图2是主从设置法的原理图,在并联的模块中选取一个作为主模块(master),其它的模块作为从模块(slave)。主模块通过电压反馈来实现并联系统输出电压的调节,从模块根据主模块所输出的电流,使其输出电流跟踪主模块的输出电流。
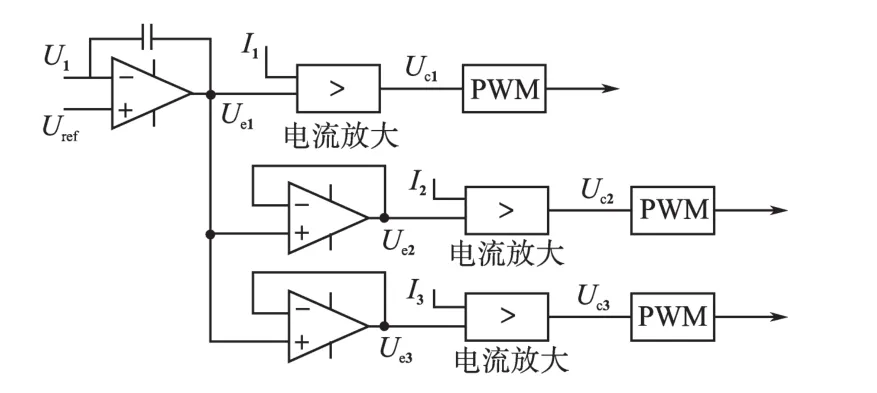
图2 主从设置法的原理图Fig.2 Principle diagram of master-slave
燃料电池后接变换器采用推挽正激变换器,结构如图3所示。
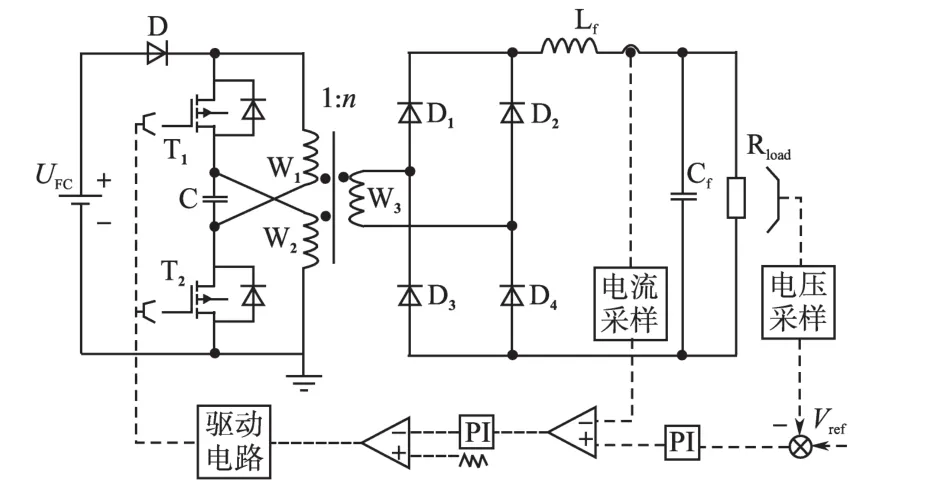
图3 推挽正激变换器Fig.3 Push-pull for word converter
电气参数:UFC=120~240 V,C=50 μF,Rload=8 Ω,Lf=1000 μF,Cf=1000 μF,n=3.3。
PI控制器参数:电流内环KP=1.1,KI=0.01;电压外环KP=0.8,KI=132。
超级电容后接变换器采用两象限电流变换器,结构如图4所示。

图4 两象限电流变换器Fig.4 Two-quadrant current converter
图4中,Ubus为燃料电池和超级电容并联母线电压。
电气参数:Usc=135 V,L1=60 μH,C1=1000 μF,Rep=10 kΩ,Res=0.01 Ω,Csc=2000 F。
超级电容充电和放电模式都采用电压电流双闭环控制,PI控制器参数如下:Boost模式,电流内环KP=0.1,KI=70;电压外环KP=0.5,KI=20。Buck模式,电流内环KP=0.05,KI=20;电压外环KP=0.05,KI=20。
将燃料电池作为主模块,超级电容器作为从模块设计均流控制器。设置负载功率为20 kW,先将2个电源模块直接并联供电,0.3 s时加入主从设置均流算法,仿真结果见图5。

图5 均流控制输出电流波形Fig.5 Current wave forms of power-following
可以看出直接并联时,燃料电池的稳态输出电流是35.2 A,超级电容器的稳态输出电流是14.8 A,均流误差为81.6%;加入均流算法后,燃料电池的稳态输出电流是25.3 A,超级电容器的稳态输出电流是24.6 A,均流误差为2.8%,满足均流误差小于5%的标准。
5 仿真结果及结论
在Matlab环境下搭建仿真模块,对设计的能量管理策略进行验证。
为模拟汽车工况的变化,在Matlab中进行以下设置:将超级电容器SOC初始值设为0.6,负载功率为0.8 kW;0.2 s时,将超级电容SOC值降至0.3,负载功率增至8 kW;0.4 s时,将超级电容器SOC值恢复到初始值,负载功率不变;0.6 s,将负载功率增至20 kW,超级电容器SOC值不变,仿真结果见图6~图8。
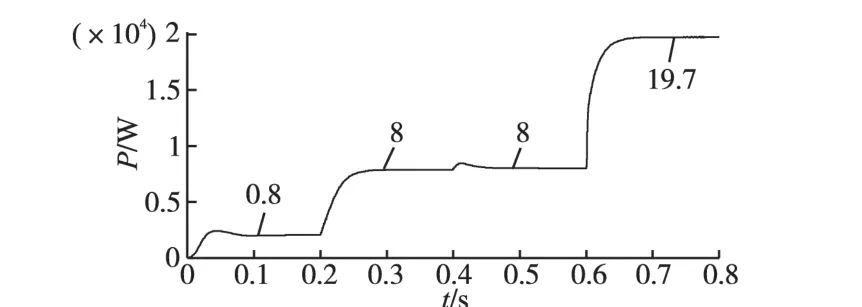
图6 负载功率波形Fig.6 Power wave form ofload
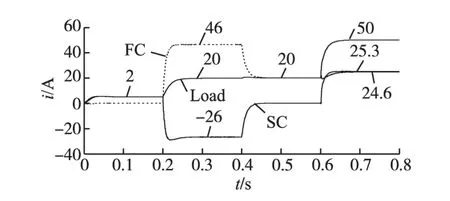
图7 FC和SC输出电流波形Fig.7 Out put current wave form of FC&SC
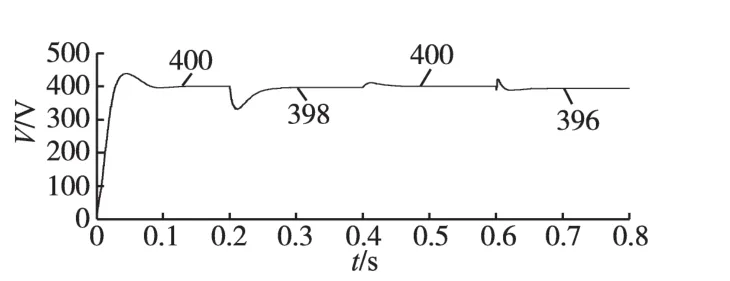
图8 负载电压波形Fig.8 Voltage waveform ofload
从图6和图7可看出,在0~0.2 s时,负载功率由超级电容器提供,燃料电池不工作。在0.2~0.4 s时,燃料电池不仅提供负载所需功率,还对超级电容器进行充电。在0.4~0.6 s时,负载功率由燃料电池提供,超级电容器不工作。在0.6~0.8 s时,燃料电池和超级电容器共同为负载提供能量。当负载功率和SOC发生变化时,燃料电池和超级电容器能按照设计的控制策略工作。
从图8可看出,在负载不断增加和燃料电池与超级电容器的工作状态不断切换的情况下,负载电压都能够保持稳定。
根据燃料电池电压输出特性偏软、动态响应差和超级电容器可快速充放电、功率密度大但能量密度较小等特点,参考国际通用城市道路循环UDDS工况的数据,设计了一种能量管理策略。仿真结果表明,在该控制策略下变换器能够根据负载功率和超级电容SOC的变化正确分配功率。
[1]Zhang Yi,Li Jinhui.New Development of Fuel Cell Vehicle[C]//ICEICE 2011.IEEE,2011(1):5970-5973.
[2]贾迎春.燃料电池混合动力电动车仿真分析与控制策略研究[D].吉林:吉林大学,2005.
[3]Yang Xiqian,Hou Ming,Sun Liyan.The Study on Transient Characteristics of Proton Exchange Membrane Fuel Cell Stack During Dynamic Loading[J].Journal of Power Sources,2007,163(2):966-970.
[4]Jiang Zhi-ling,Chen Wei-rong.Energy Management for a Fuel Cell Hybrid Vehicle[C]//APPEEC 2010.IEEE,2010:6612-6617.
[5]Phatiphat Thounthong,Panarit Sethakul.Control of Fuel Cell/Battery/Supercapacitor Hybrid Source for Vehicle Applications[C]//Industrial Technology 2009.IEEE,2009:1-6.
[6]张飞飞.混合动力车用复合电源优化控制算法研究[D].吉林:吉林大学,2012.
[7]张京明,王守军.PHEV再生制动试验台建模与仿真[J].机械设计与制造,2010(4):58-60.
[8]张军明,谢小高.DC/DC模块有源均流技术研究[J].中国电机工程学报,2005,19(25):31-36.
猜你喜欢
湖北农机化(2021年7期)2021-12-07
物理之友(2020年12期)2020-07-16
电子制作(2019年22期)2020-01-14
山东冶金(2019年5期)2019-11-16
装备制造技术(2018年8期)2018-10-17
汽车维护与修理(2018年1期)2018-04-04
作文周刊·小学一年级版(2017年27期)2017-08-10
通信电源技术(2016年6期)2016-04-20
自动化仪表(2015年5期)2015-06-15
汽车维修与保养(2015年6期)2015-04-17