
一种MCP光子计数位置灵敏探测器图像采集系统*
2013-08-15 02:00:16何玲平岳巾英
光学仪器 2013年5期
何玲平,岳巾英,陈 波
(1.中国科学院 长春光学精密机械与物理研究所,吉林 长春 130033;2.长春工程学院 理学院,吉林,长春 130021)
引 言
工作于计数模式的位置灵敏探测器在微光成像及粒子探测领域起着重要作用,已经在空间探测、物理学、生化学等领域广泛应用[1-2]。由于工作于计数模式,该类探测器具有超低噪声的优点,具有比一般像增强器更高的灵敏度和更大的动态范围,能够通过长时间的曝光获取足够的能量,重建极其微弱辐射目标的图像。
位置灵敏探测器首先通过微通道板(microchannel plates,MCP)对光粒子信号响应并放大,经过位置灵敏阳极收集MCP输出信号,由后续前端电子系统放大后,再由信号采集系统采集此信号,最后经图像生成程序计算光子位置并大量统计光子位置生成图像。由信号采集硬件平台及之后的图像生成软件组成的图像采集系统是整个光子计数成像探测器中的重要组成部分。美国NI公司将数据采集系统的硬件与数据处理软件结合起来,方便灵活,不仅降低了传统仪器的成本,而且提高了用户的工作效率[3-4]。本文正是使用NI的硬件和软件完成了光子计数位置灵敏探测器的图像采集系统的研制。
1 光子计数位置灵敏探测器成像原理
光子计数位置灵敏探测器常采用MAMA阳极、Resistive阳极、楔条形阳极以及延迟线阳极等位置灵敏阳极对光子进行位置解码[5-7],与其他阳极相比,楔条形阳极具有结构简单、位置分辨率高、计数率高等优点,且其后续电路较简单,广泛使用于空间成像、实验室粒子成像等领域。因此,本文设计光子计数位置灵敏探测器使用楔条形位置灵敏阳极[8]。
图1是基于楔条形阳极的光子计数位置灵敏探测器结构示意图,整个系统由真空室部分、前端电子系统、图像采集系统三部分组成。其中图像采集系统包括信号采集硬件平台及图像生成软件。微通道板将入射光子转化为电子并加速激发大量的电子,形成一定大小的电子云由楔条形阳极收集。阳极收集电子后会输出三路电极信号,这三路信号通过楔条形阳极的位置解码算法公式能够求解出光子入射位置[9]。位置解码算法公式如下:

前端电路系统将信号放大、整形并进行峰值保持,便于信号采集平台采集。信号采集硬件需要对三路电极信号进行同步采集,并尽可能采集所有到达的信号。图像生成软件实时读取采集系统存储在内存中的数据,根据楔条形阳极的位置解码算法编写程序,计算光子位置,并在该位置计数,通过大量光子计数获得一幅完整图像。
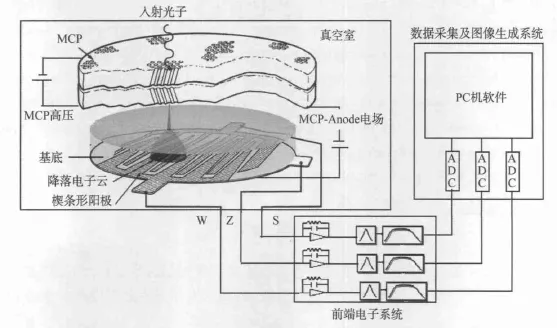
图1 楔条形位置灵敏探测器设计图Fig.1 Design diagram of wedge-strip anode position-sensitive detector
2 信号采集硬件
对于位置灵敏探测器来说,MCP-阳极接收光子并产生电荷信号,是采集信号的来源,前端电路系统作为信号调理系统使得信号易于采集,而图像采集系统最终实现信号的采集并按照成像算法对数据进行处理生成图像。本文将在分析位置灵敏探测器输出信号特点的基础上,搭建一套基于美国NI公司硬件的信号采集系统。
根据信号特点,一般采集系统有单差分测量和单端测量两种测量方式[8]:差分测量系统在两个通道上分别测量信号正负两极之间的电位差,具有抑制动态共模电压的优点;单端测量系统中每个通道只有一个单端输入,所有通道共用一个系统地,有利于节省硬件资源[10]。光子计数探测器三路电极信号都是一端接公共地的电压信号,且经前端电路放大整形后对动态共模噪声不敏感,因此,采用单端作为本系统的测量方式。
本文采用NI的数据采集卡对信号进行采集,根据被测信号特点需要确定采集卡的性能要求。首先是对采样速率的要求,根据奈奎斯特采样定理,采集卡的采样速率最少应该是被采信号的最高频率的两倍以上,而实际上为了准确采样,采样率应该不低于被采信号最高频率的10倍。光子计数探测器的最高计数率要求为54kHz。因此,所需的采集卡的采样率应该高于540kHz/s。其次需要考虑的是采集卡的电压范围。一般采集卡由于供电方式不同,所能采集的电压范围也不同。探测器信号由前端电路放大整形后幅值一般为0~5V,故采集卡电压范围至少要能涵盖这个信号范围。分辨率是采集卡的另外一个重要性能,它与采集电压范围共同决定采集卡的测量灵敏度及采样精度,即ΔV=Vmax/2N。探测器分辨率要求为200μm,MCP口径为40mm,因此分辨单元为200,它和测量灵敏度存在以下关系:ΔV<1/200,即ΔV<0.005。要在0~5V范围内达到这个精度,采集卡的分辨率至少应该达到10bit。最后,光子位置解码要求同时采集阳极的三路信号,因此要求采集卡还具备多通道同步采集功能。
基于上述分析,在考虑成本与性能的平衡上,选择了NI的PCI-6110作为系统的采集卡。PCI-6110数据采集卡为每个通道都配备一个ADC,在同一个时钟信号驱动下能够多通道同步且每通道采样频率高达1.25MHz/s。分辨率为14bit,0~5V的测量范围下,测量精度为0.000 3V。该采集卡各项性能指标都能满足对信号采集的要求。
3 图像生成程序设计
图像采集系统的图像生成程序要求具有以下功能:采集卡参数设置及启动、采集数据存储读取、质心位置计算、光子计数、图像显示等功能。编程工具采用了美国NI公司的图形化编程语言LabVIEW[11-12]。
整个程序的难点在于光子信号数据量比较大且每个光子都要进行较复杂质心解码计算,数据处理时可能出现不能及时读取存储区数据的情况,导致存储区数据溢出,部分光子无法计数。为了解决这个问题,程序对数据流采用生产者-消费者状态机模式进行处理:生产者循环持续读取硬件所采集的数据,消费者循环通过数据队列读取数据并进行质心解码、数据保存及图像显示等工作;生产者循环与消费者循环各自独立运行。生产者-消费者设计模式能够加强不同运行速率的循环之间的数据共享效率,解决了数据采集与处理速率不匹配时程序出现的数据溢出或者程序效率低下等问题。生产者-消费者模式基本原理如图2所示,通过调用LabVIEW内建的队列操作函数,在两个循环间建立一个数据缓冲区,用于生产者循环与消费者循环之间的数据传递,将数据产生与处理过程剥离分开,降低两者之间的耦合度,从而实现对数据及时的读取与处理。
图3是程序功能实现框图。采集卡首先设置各项参数包括电压范围、采样速率、采样模式、时序及触发模式等。启动采集后,生产者循环按照设定时间周期去内存中读取数据,并存入通过数据共享队列;只要队列中存有数据就能激活消费者循环,读取数据并进行处理。消费者循环实现的功能包括两个:光子位置解码及图像灰度值计数。位置灵敏探测器计数一个光子时,触发采集卡同时采集三路电极信号,需对这三个信号进行位置解码,计算该光子在MCP上位置。建立一个图像存储空间,代表探测器接受表面MCP,每个存储单元对应进行MCP的一个分划位置。由解码的光子位置对图像存储空间进行寻址,将该位置的灰度值加1,图4是位置解码及寻址计数成像示意图。光子质心位置解码计算需要进行两个除法运算和若干乘加运算,其中除法运算比较费时。当每秒都有数万个光子位置需要计算时,生产者循环需要快速读出数据,为避免队列缓冲区过大,消费者循环计算速度要尽量快。因此消费者循环中的质心解码算法模块的程序运行效率对整个程序的运行效率影响至关重要。LabVIEW是图像化的高级编程语言,在大批量复杂运算方面效率并不高,而C语言在大量复杂运算方面具有优势。LabVIEW通过动态链接等方式能够与C语言无缝连接。因此,本程序使用C语言实现位置解码算法,有Visual C++6.0将其编译成动态链接库,在LabVIEW中通过调用库函数节点(CLF)调用解码算法的C语言实现。
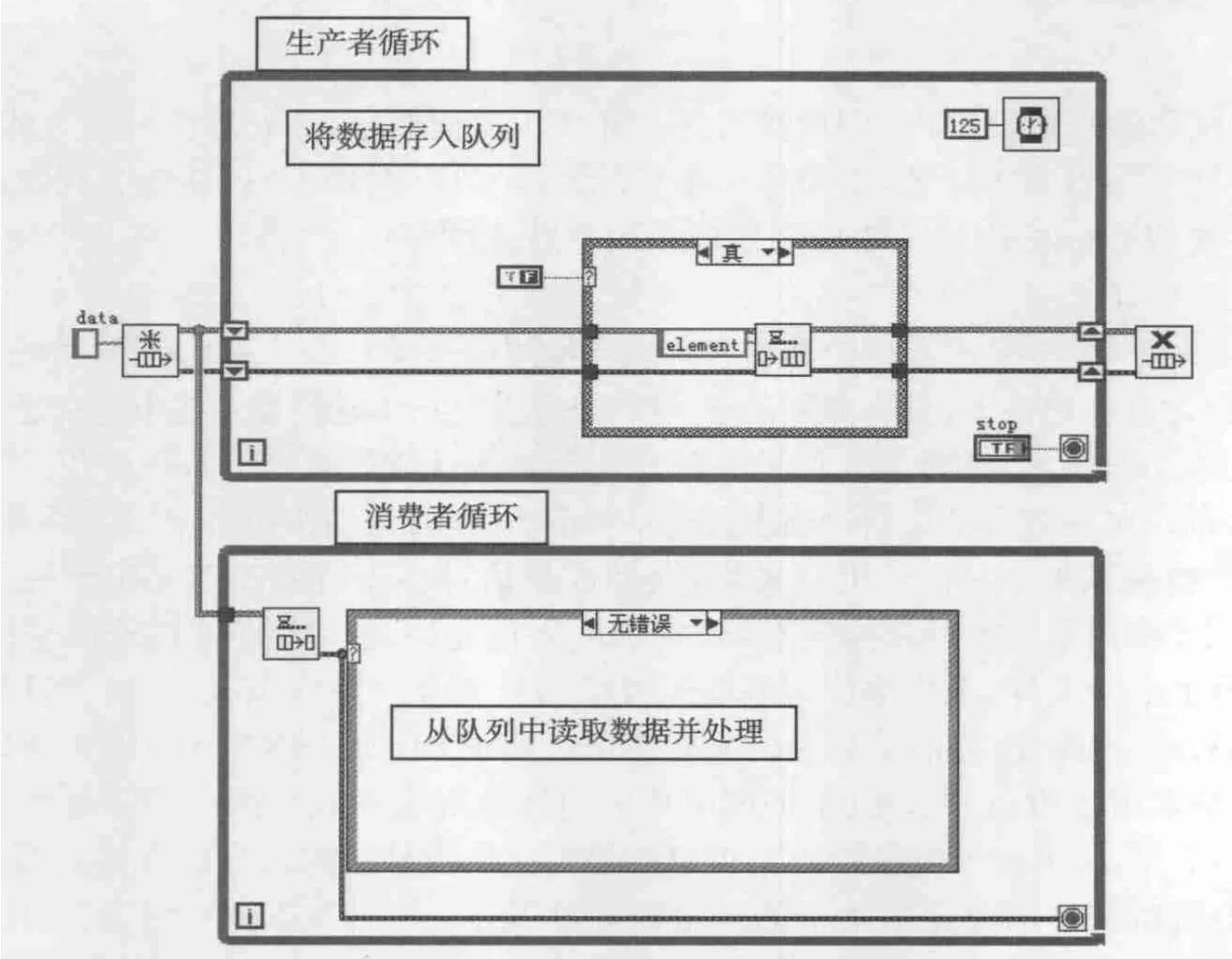
图2 生产者-消费者循环Fig.2 Producer-consumer cycle
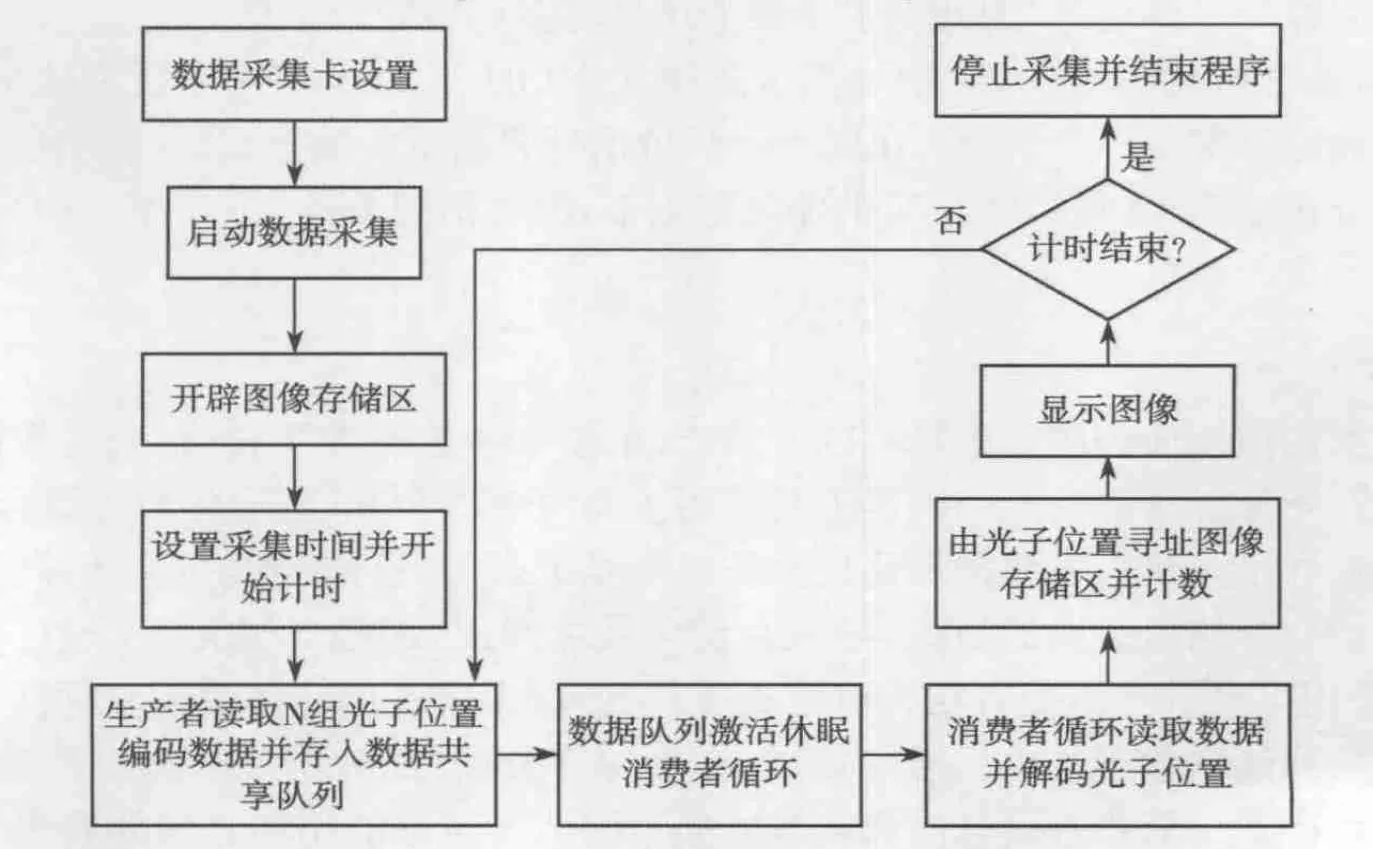
图3 程序功能实现框图Fig.3 Block diagram of the implementation of software function
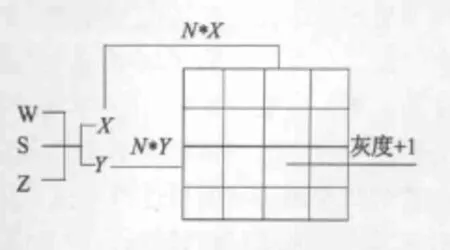
图4 计数成像示意图Fig.4 Schematic diagram of counting imaging
4 图像采集界面及实验结果
图5是编写的图像采集软件界面。整个界面分为三个部分:指令按钮区、参数设置区和图像显示区。指令按钮区主要包括一些程序的常用操作指令,其中“光子采集”按钮启动光子数据的采集,并同步将数据保存在电脑的制定位置;“读取光子数据”按钮用于读取保持于电脑上的光子产生的三路电极信号的原始数据,并同步进行位置解码计数,同时显示图像;“图像生成”按钮命令系统直接处理三路电极信号生成图像。除了这几个主要命令外,还包括“图像保存”、“图像读取”等指令按钮。参数设置区主要输入一些重要的图像生成参数,包括采集光子数量、图像虚拟像元数、图像放大系数、电极信号串扰修正系数、放大器零输入偏置设置、图像中心化偏移以及图像旋转角度等。图像显示区用于显示生成的图像,通过调整灰度值的上限,可以对图像进行亮度和对比度调整。
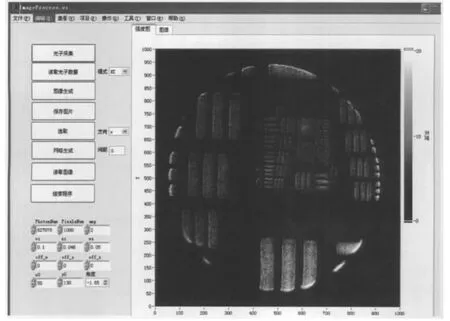
图5 图像采集软件界面Fig.5 Diagram of the image acquisition software interface
本文针对实验室研制的一套光子计数位置灵敏探测器的特点,实现了本套图像采集系统,将两者连接,进行了成像性能检测。通过检测实验,完成了图像采集系统功能的测试。检测结果表明该图像采集系统完全实现了预期功能,能够完成电极信号采集、位置解码、灰度值计数及图像显示等功能。图6是使用该图像采集系统采集的一幅USAF1951分辨率板图像,根据所能分辨的最小线对所对应的组号和单元号,可以按下式计算其对应空间频率:

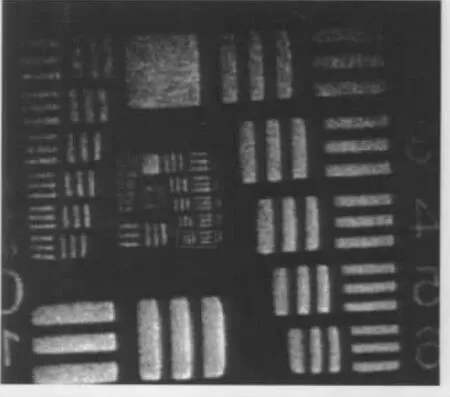
图6 采集USAF 1951图像Fig.6 Acquired image of USAF 1951
式中:g为组号;c为单元号。
从图6中可以看出这套位置灵敏探测器能够将2组6单元的线对,因此,该图像采集系统能够将空间频率为7.14lp/mm的目标分辨出来。
5 结 论
本文在介绍位置灵敏探测器成像原理基础上,分析了对图像采集系统需求,构建了一套图像采集系统的软硬件平台并通过成像检测实验验证了其功能及其完备性。实验结果表明,该套图像采集系统能够完全实现位置灵敏探测器成像对其的需求,由其采集的图像能够将空间频率为7.14lp/mm的目标分开。
[1]SANDLE B R,BROADFOOT A L,CURTIS C C.The extreme ultraviolet imager investigation for the IMAGE mission[J].Space Science Reviews,2000,91:197-242.
[2]MASATO N,TATSUNDO Y,KOICHIRO T,et al.Interplanetary HeII extreme-ultraviolet observation on PLANET-B[J].Society of Photo-Optical Instrumentation Engineers,1993,32:3033-3037.
[3]王 浩,余有龙,王雪微.光纤可调F-P滤波器频率响应特性的实验研究[J].光学仪器,2012,34(6):67-70.
[4]李奕鑫,黄家政,罗烽庆,等.光学仪器共享与远程控制系统的开发[J].光学仪器,2010,32(1):75-81.
[5]KASLE D B,MORGAN J S.High resolution decoding of multi-anode microchannel array detector[J].SPIE,1991,1549:52-58.
[6]LAMPTON M,CARLSON C W.Low-distortion resistive anodes for two-dimensional position-sensitive MCP systems[J].Rev Sci Instrum,1979,50:1093-1097.
[7]SIEGLNUND O H W,STOEK J M,MARSH D R,et al.Delay line detectors for the UVCS and SMMER instruments on the SOHO satellite[J].SPIE,1994,2280:89-100.
[8]MARTIN C,JELINSKY P.Wedge-and-strip anode for centroid-finding position-sensitive photon and particle detectors[J].Rev Sci Instrum,1981,52(7):1067-1074.
[9]何玲平,尼启良,李 敏,等.楔条形阳极光子计数探测器成像性能的检测[J].光学 精密工程,2009,17(11):2699-2704.
[10]樊尚春,乔少杰.检测技术与系统[M].北京:航空工业出版社,2005.
[11]李霖峰,董 磊,张 雷,等.基于LabVIEW 的光谱自动测试系统[J].光学仪器,2006,28(2):66-70.
[12]吴强华,王铁岭,董 涛.基于LabVIEW 的任意波形发生器设计[J].光学仪器,2007,29(2):68-72.
猜你喜欢
中国石油石化(2022年12期)2022-07-16 08:28:28
中国测试(2022年2期)2022-03-19 09:57:30
中国外汇(2019年19期)2019-11-26 00:57:32
家庭影院技术(2018年11期)2019-01-21 02:20:50
家庭影院技术(2018年11期)2019-01-21 02:20:48
电子测试(2018年18期)2018-11-14 02:30:26
红领巾·探索(2018年6期)2018-09-22 05:52:28
海峡姐妹(2018年4期)2018-05-19 02:12:43
制造技术与机床(2017年8期)2017-11-27 02:10:05
网络安全与数据管理(2016年4期)2017-01-10 03:44:42
