
解析铁水包跟踪系统的实现方式
2013-08-14 11:21:52李铁亮
河南科技 2013年3期
李铁亮
(唐山首信自动化信息技术有限公司,河北 唐山 063200)
1 概述
铁包跟踪管理系统,采用微波射频识别技术,系统通过采集铁包在途位置信息,实时反映铁包运输过程的路径,在途时间和位置,实时反映铁包进入炼钢厂区后,铁包在铁水预处理工序的处理状态,铁包在脱磷炉兑铁以及铁包从脱磷炉出来到脱碳转炉的生产实绩。此外还有铁包的维修记录,如修包检修记录、铁包包龄等信息。
2 系统组成及功能
2.1 铁包跟踪系统的硬件构成及网络结构
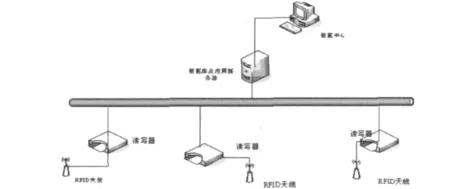
图1 硬件网络构成示意图
2.2 系统设备组成
系统由三套相对独立的部分构成
现场数据采集部分包括:主机(SRR-915C)、射频天线(RFID)、电子标签、磁钢。
传输部分包括:光端机、光纤、485总线
上位机处理部分为:数据采集软件
2.3 铁水包跟踪系统设备安装位置
铁路车号自动识别主机 安装位置:铁路车号自动识别主机主要采集铁路电子标签信息,同时生成合乎需求的报文格式向上位机传送。
天线RFID 天线采用地面天线,安装在两轨中央的两枕木之间,长边平行枕木。
磁钢 即车轮传感器,具有高抗干扰性能,主要用于检测车轮通过信息,用安全卡具卡在钢轨内侧。每套车号自动识别系统配装了4个车轮传感器。远端的两个磁钢作为启动主机工作的触发信号,中间的两个磁钢为判别列车方向使用。
射频电缆 射频电缆主要用于连接天线及主机。在安装时,要求尽量平滑顺直,弯曲弧度尽可能大于120°
车辆电子标签 车辆电子标签存储有车辆唯一的20位身份信息,车辆电子标签安装在车辆底部的中梁上。
光端机 光端机的安装位置分别安装在轨道旁,采集器比较集中的地方。铁路车号自动识别主机的通信接口通过485总线接入光端机。
上位软件主机 接受车号识别系统上传的标签信息,连接远程数据服务器,整合铁包的速度、方向、时间、位置等信息实时上传,已达到对连接数据服务器的终端画面显示的更新。
2.4 系统软件结构
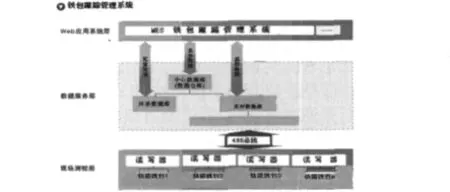
图2 铁水包跟踪系统的数据库结构
3 系统功能及其工作原理
3.1 系统功能
·对铁包车的在途状态进行实时跟踪,实现铁包车车号信息自动采集。
·实现全部信息的实时查询及输出
3.2 系统工作原理
RFID的工作原理,阅读器将要发送的信息,经编码后加载在某一频率的载波信号上经天线向外发送,进入阅读器工作区域的电子标签接收此脉冲信号,卡内芯片中的有关电路对此信号进行调制、解码和解密,然后对命令请求、密码和权限等进行判断。若为读命令,控制逻辑电路则从存储器中读取有关信息,经加密、编码、调制后通过卡内天线再发送给阅读器,阅读器对接收到的信号进行解调、解码、解密后送至中央信息系统进行有关数据处理。
4 系统设备的关键技术指标速度、方向的识别
在工程安装中,用于速度和方向判别的两个磁钢间距0.3m。即为中间的两个磁钢。假定车辆在0.3m中是匀速运动,两个磁钢分别记录同一车轮通过两个磁钢的时间t(S)和t'(S),计算出△t=t'-t,车速 V=0.3m ÷ △t(m/s)
车号识别系统主机磁钢板GPI0和GPI1自东向西分别接1号和2号磁钢,同一转向架两个车轮通过1、2号两个磁钢产生四个时刻信息,t1、t1'和 t2、t2',△t1=t1'-t1;△t2=t2'-t2,△t1、△t2均为正值,就为A方向,△t1、△t2值均为负则为B方向。
总结:信息化、智能化管理正是现代企业管理的发展主流,也是企业可持续发展的内动力。铁包跟踪管理系统的实现将有效提高现有铁水运输设备利用效率,减少资源浪费,为科学高效的管理提供依据,并将减少人员工作量,降低运输成本。
[1]作者:韩兵《现场总线系统监控与组态软件》化学工业出版社.2008.6
[2]作者:黄军,刘燕《Delphi串口通讯编程》人民邮电出版社.2001.8
[3]作者:郎为民《射频识别RFID技术原理与应用》机械工业出版社.2006.8
猜你喜欢
江苏海洋大学学报(自然科学版)(2022年1期)2022-06-01 08:02:54
科学技术创新(2021年13期)2021-05-16 10:33:28
防爆电机(2020年4期)2020-12-14 03:11:08
哈尔滨铁道科技(2020年1期)2020-07-27 01:45:52
机电工程技术(2020年4期)2020-05-30 01:01:56
微特电机(2019年1期)2019-02-25 02:09:44
新生代(2018年20期)2018-11-13 21:01:21
铁道通信信号(2018年4期)2018-06-06 03:31:33
中国新技术新产品(2015年17期)2015-12-23 06:53:06
上海电机学院学报(2015年4期)2015-02-28 14:30:01
