
数字传感器系统的研究与实现
2013-08-13 05:06张国军薛晨阳刘林仙葛晓洋
电视技术 2013年5期
张 慧,张国军,薛 南,薛晨阳,刘林仙,葛晓洋
(中北大学a.电子测试技术重点实验室;b.仪器科学与动态测试教育部重点实验室,山西 太原 030051)
在高度发展的现代工业中,为满足工业控制的需要,现代测试技术的发展趋于数字化、信息化方向。传感器的出现极大地促进了测试技术的发展,它作为测试系统的最前端,是整个测试系统的灵魂。数字传感器具有信号滤波功能,在传输过程中抗干扰能力强,具有较高的稳定性和测量精度,可实现远距离测量和监测功能[1]。因此,它适用于要求高稳定性、高精确度的检测系统。
1 总体设计说明
水声传感器通过振动输出模拟信号,经微处理器对该信号进行误差修正和滤波处理,使用CAN总线进行传输,完成采集信号的数据分析,将模拟加速度信号转换为数字信号,处理后的数据经过缓冲传输到中控机或其他CAN节点进行存储。为了验证传输数据的正确性,设计额外的CAN接收模块,通过传输前后数据对比以验证其正确性,其流程图如图1所示。
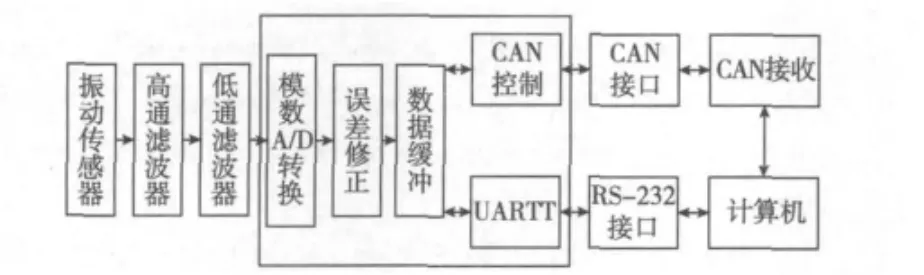
图1 系统工作流程图
2 滤波电路设计
信号从传感器输出后,信号调理电路对其进行适当的调理,即对信号进行放大、缓冲,定标模拟信号,将信号控制在A/D转换电压范围之内。信号必须在形式、幅度、信噪比、转换灵敏度和精度等方面达到中央处理器的要求[2],才能送入模数转换器,因此必须对信号进行滤波,滤掉信号中的杂波成分,这样才能提高传感器数字化后的精度[3]。
2.1 高通滤波
本设计选择OPA4340作为高通滤波的有源运放,其增益稳定、频率范围宽。调节该电路中反馈元件C、R,使f=f0时电压放大倍数数值增大,又不会产生自激振荡。具体电路如下图2所示。
根据要求设置各元器件的参数,使Aup≈1 A,fp=1 kHz。
模拟振动传感器的信号输入后,得到的幅频特性曲线如图3所示。由图3可以看到频率在0~1000 Hz内,基本保持0 dB。
2.2 低通滤波


由上式知,截止频率由引脚CLK的外接电容的大小控制。根据上述原理,得到低通滤波电路图(如图4)及其仿真结果图(如图5)。其fosc=1 kHz。

图4 低通滤波电路
至此,按要求实现了加速度模拟电压输出的基本无放大滤波。

图5 低通滤波仿真电路的幅频特性(截图)
3 数据的转换传输
3.1 A/D转换
对模拟传感器的输出信号进行A/D转换是设计数字传感器的必要过程。在传感器数字化系统设计过程中,考虑系统紧凑性,选用微处理器集成的A/D转换器。
传感器信号经滤波等预处理后,以均匀间隔对模拟信号进行抽样并且在每个抽样运算后在足够的时间内保持样值恒定,以保证输出值可以被A/D转换器精确转换[4]。设置相应寄存器,对模拟信号进行转换。图6是A/D转换的程序流程图。
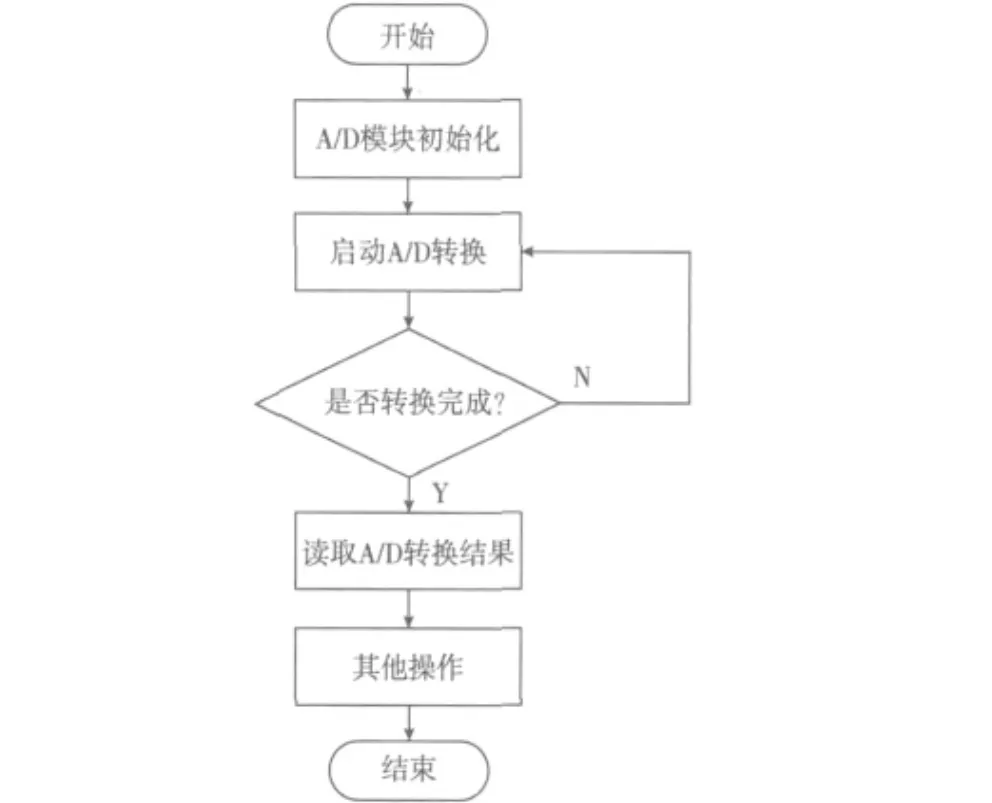
图6 A/D转换流程
将振动传感器的输出信号进行转换后,将所得到数据进行相应误差处理经串口传送至计算机,利用MATLAB对处理信号进行仿真,得到振动信号电压输出。
3.2 数据传输接口总体设计
考虑到应用方面,设计了CAN总线和RS-232串口通信两种方式。在传输过程中,为解决速度不匹配问题,还需要对数据进行缓冲[5]。
3.2.1 CAN总线设计
1)硬件设计
硬件选用MC9S12XS128单片机,内部集成了CAN控制器,它可以控制从总线上接收或发送报文。使用CAN总线驱动芯片TJA1050,它是CAN控制器和物理总线之间的接口,通过其引脚8可选择高速和待机模式,还可以为总线提供差动发送性能[6]。为避免过流冲击,将CANH和CANL引脚与CAN总线之间均连接一个5 Ω的电阻;为滤除总线上的高频干扰和降低电磁辐射,将CANH和CANL与地之间各自并联1个30 pF的电容。其电路如图7所示。
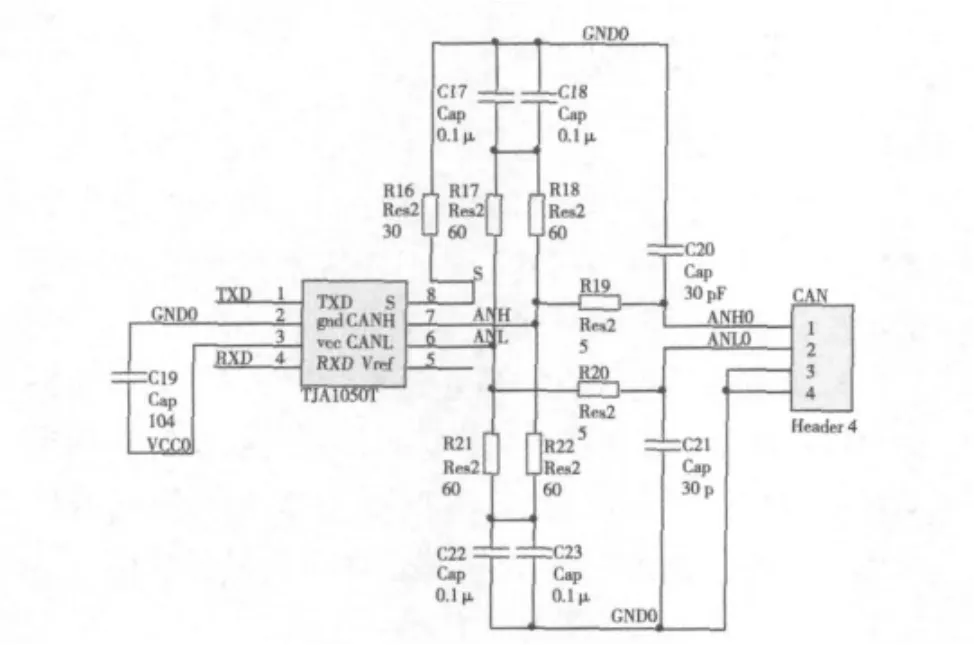
图7 CAN总线驱动器
如图8将发送引脚TX0和接收引脚RX0通过高速光耦TLP113后与收发器TJA1050相连以增加总线的抗干扰能力[7]。
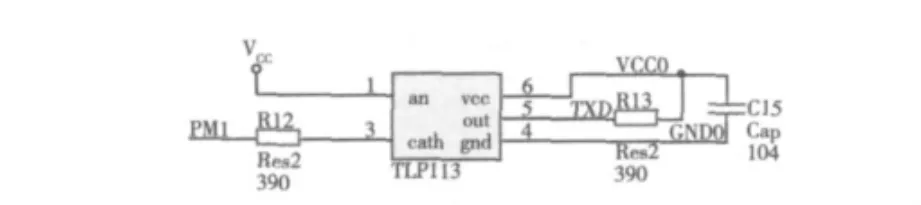
图8 高速光耦电路
2)软件设计
CAN总线控制器在每次上电或软件复位后,必须通过初始化设置其通信工作参数,这是关系到能否成功建立通信的关键问题。初始化程序主要完成对相关参数清零,对一些定时器、计数器等进行设置,然后清除复位标志,就可以实现CAN节点与总线之间的通信[8]。
CPU与物理总线之间的数据传输是受CAN控制器中断协调的。当接收缓存器满时,CAN控制器发出中断请求,通知CPU将数据取走;当发送缓冲器数据发送完,亦出中断请求,就可以继续写入新的数据[9]。流程图如图9所示。
3.2.2 RS-232串行通信口设计
由于MC9S12XS128单片机内部集成了异步串行通信接口模块SCI,同时有完整的串口接口电路。因此,本设计主要完成串口通信的程序设计即可,即设计SCI串口通信程序,主要是掌握8个寄存器,设置好初始化。
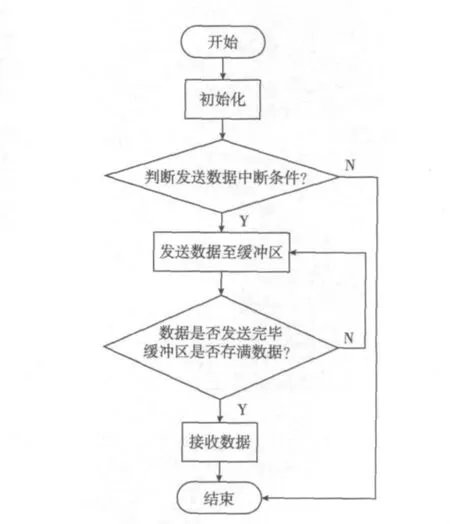
图9 程序的流程图
4 测试实物及结果
本实验验证了数据化传感器系统的正确性与可靠性。将接收模块收到的信号进行进一步处理,然后与理论数据结果比较,来验证振动加速度大小与模拟输出电压的测量关系和相应的理论关系的相符性。其实物如图10所示。
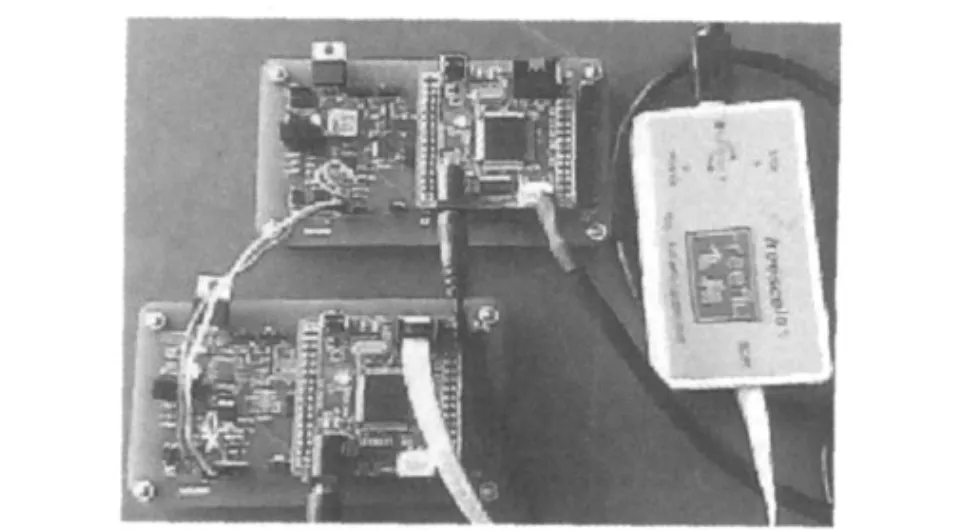
图10 实验实物图
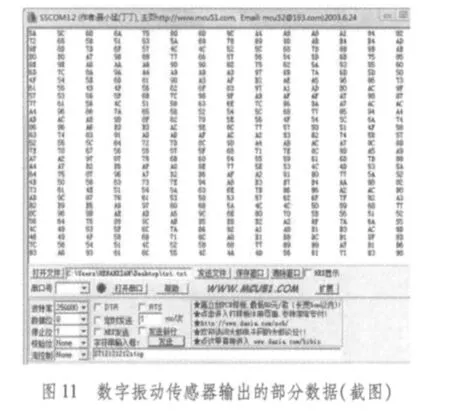
图11为计算机接收到的加速度传感器输出部分数据,由图11知采用处理器芯片波特率为256000 Baud,每毫秒发送一个数据,采用8位精度,通过AN00通道进行模数转换,接收到得加速度信号以16进制的方式显示在串口调试软件上。
利用采集数据得到加速度大小,与输出电压大小做对比,得出测量关系如图12所示。
通过图12结果可知,经过模数转换后得到的结果和实际振动信号是相符的,并且根据结果拟出的振动加速度大小和模拟电压输出的关系理论关系基本一致。

5 结论
利用微处理器对振动信号进行了数字缓冲处理和误差修正;增加滤波电路,减小噪声对信号的影响,提高了传感器精度;实现了传感器数字信号的实时传输与监控。
[1]刘俊,柳春图,张常年,等.数字传感器及其应用[J].测控技术,2000,19(5):29-31.
[2]刘文怡,韩志军.基于IEEEl451标准接口的智能传感器硬件设计[J].电子设计工程,2009,17(3):106-110.
[3]姚丹.一种LVDT精密测长仪的仿真研究[D].大连:大连理工大学,2009.
[5]ISO 11898,Road vehicles-Interchange of digital information-Controller area network(CAN)for high-speed communication.International Standard Organization[S].1993.
[6]TJA1050 CAN high-speed transceiver[EB/OL].[2012-05-05].http://wenku.baidu.com/view/21d1731959eef8c75fbfb3bd.html.
[7]吴强,吴坚.基于CAN总线的温度测量节点设计[J].山西电子技术,2011(3):36-37.
[8]蔡华锋,廖冬初,潘健,等.C8051F040中CAN控制器的应用[J].单片机及嵌入式系统应用,2005(1):55-58.
[9]邬宽明.CAN总线原理和应用系统设计[M].北京:北京航空航天大学出版社,1996.
猜你喜欢
声学与电子工程(2021年2期)2021-07-26
装备制造技术(2020年11期)2021-01-26
测控技术(2018年6期)2018-11-25
测控技术(2018年8期)2018-11-25
电子制作(2018年11期)2018-08-04
电子制作(2017年1期)2017-05-17
电测与仪表(2016年15期)2016-04-12
通信电源技术(2016年4期)2016-04-04
通信电源技术(2016年5期)2016-03-22
职业技术(2015年8期)2016-01-05
