半潜式航行器安全控制策略研究*
2013-08-10 09:03易谷丰
舰船电子工程 2013年1期
易谷丰
(中国船舶重工集团公司第七一〇研究所 宜昌 443000)
1 引言
半潜式航行器是一种工作在近水面,有桅杆伸出水面,由柴油机提供动力的航行器,它具有操纵性和适航性好、搭载能力大、续航能力强等优点。但是在拥有诸多优点的同时,也决定了半潜式航行器的系统要比其他无人水中平台复杂得多,因此也就更容易出现安全问题。
半潜式航行器本身是十分复杂的系统,一旦在工作中出现故障,轻则影响任务完成,重则导致半潜式航行器沉没丢失,造成政治、技术及情报方面的重大影响与损失。因此必须加强半潜式航行器安全控制策略研究,及时发现安全问题,给出故障信息,并确定故障的部位、类型和严重程度,给出相应的控制和处理方案,削弱、补偿和消除故障,以保证设备的性能尽可能地接近原来正常工作时的性能,或以牺牲部分性能指标为代价来保证设备继续完成其规定的功能。对半潜式航行器进行安全控制策略研究,保证及时准确地发现并解决安全问题,对于提高其自身的安全,具有现实意义。
本文从航行控制系统设计的角度出发,在阐述典型半潜式航行器航行控制系统主体框架的基础上,初步研究了半潜式航行器控制系统的安全控制策略。本文所阐述的安全控制不仅是指硬件和软件的安全设计考虑,如硬件冗余和软件代码的安全设计等,而且将引起安全因素的具体原因、故障过程和故障特征融入到控制系统设计中,期望通过内置的控制策略尽量保证航行器的安全。
2 半潜式航行器控制系统安全设计概要
图1是典型半潜式航行器控制系统组成:
将系统的故障种类归纳为如下几类:
1)避碰,航行器作业范围很大,在运行区域,复杂的海底地形、起伏的珊瑚礁和沉船残骸等障碍物,将会严重影响到航行器的安全。一旦发生碰撞,必将会引起重大事故,因此航行安全威胁等级设定为极高。
2)无线数传信道中断、信号被干扰以及综合控制系统误操作引起的操纵链路故障,此类故障较常见,是航行事故的主要诱因之一,包括操纵手疲劳误操作、无线数传信道出错、异常指令等等。航行安全威胁等级设定为中高。
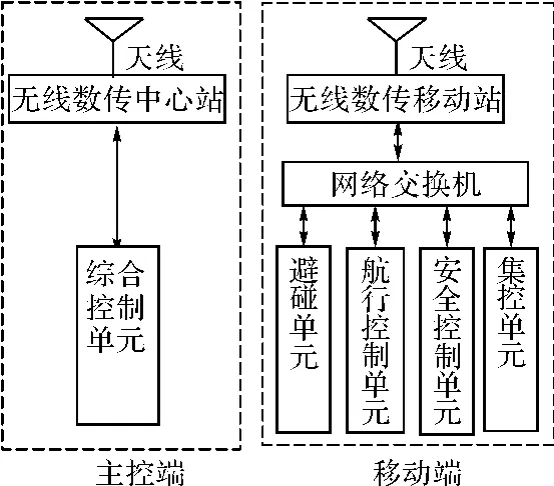
图1 典型半潜式航行器控制系统
3)系统硬件故障,包括舵机失效、传感器失灵、航行控制计算机死机、信号驱动线路中断,电源失常波动甚至失效等。该种故障虽然在成品后出现概率不高,但在研制期间是频繁出现的。这类故障一旦处理不当必将引起重大事故。故航行安全威胁等级设定为极高。
4)柴油机故障[1],或燃油耗尽,甚至是柴油机起火,将导致航行器失去动力,甚至出现极其重大的险情。此时若航行体其他系统可正常工作,则可以通过无线数传系统向综合控制系统传输自身的GPS信息,原地等待救援。设定此类故障的航行安全威胁等级为高。
3 避碰控制策略
航行体的避碰过程由搜集信息、确定最短避碰距离、判断、确定避碰方案、确定避碰时机、实施避碰方案并准备复航六个部分组成[2],各个部分之间关系如图2所示。
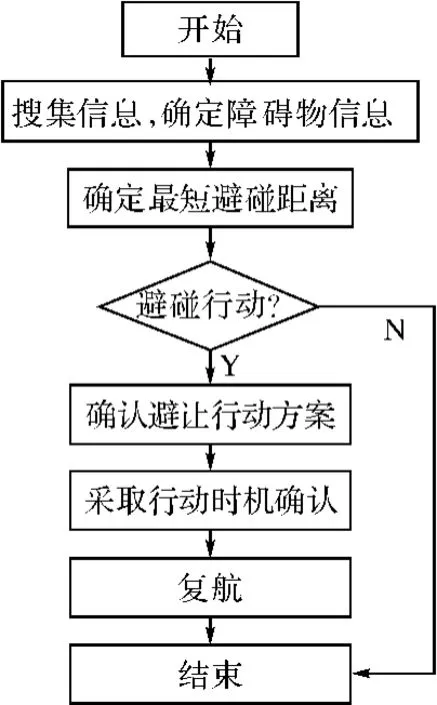
图2 避碰过程
1)搜集信息,确定是否有障碍物
搜集信息是一个避碰过程的开始,也是后续避碰决策的基础,避碰信息[3]包括环境信息、航行体信息和障碍物信息三部分。环境信息主要指航行水域、风、流、浪等方面的信息;航行体信息包括航行体姿态、航向、航速、当时负载情况下的操纵性能等信息;障碍物信息主要是其相对方位、距离。
2)确定安全通过距离[4]
在有障碍物的情况下,根据1)中提供的信息,确定安全通过距离。
3)判断是否要采取避让行动
这一步决定着此避碰过程是否需要继续,也是避碰过程能否成功的关键。它需要综合多种因素,确定碰撞危险度,判断碰撞态势,再根据避碰规则进行判断。
4)确定避碰行动的方案
在需要避让的情况下,根据当时航行体的态势,根据避碰规则及经验确定合理的避碰方案。
5)确定采取避碰行动的时机
在确定合理的避碰方案后,还需要确定最佳的行动时机。
6)复航
实施合理、有效的避碰方案以后,危险解除了,航行体可以继续正常航行。对于自动避碰系统来说,又回到了第一步。
4 操纵链路故障情况下的控制策略
操纵链路出现故障情况,包括综合控制系统的安全控制、无线数传信道的安全控制两个方面:
4.1 综合控制系统控制台的安全控制策略
半潜式航行器在研制过程中,摇杆操纵台是必要操纵设备。但该设备对航行安全带来了一些不良的影响,诸如杆量大小不易控制、操纵手容易误操作、无安全机构和既定状态保持措施,操纵手在执行操作过程中压力大、易疲劳。采用座舱方式能提供良好的操纵环境和直观的座舱显示,操纵手通过坐姿杆式中位操纵器和自动航行操纵面板操纵航行器,并附加容错设计和人机工程学设计[5]。
若不具备研制上述设备的条件,则建议研制辅助的自动航行操纵面板,将摇杆式操纵器增加若干切换开关,通过软件设计使摇杆的全量操纵方式变成增量操纵方式,以实现自动航行模态的切换,并减缓过大的航行状态迁移和实现操纵手自主操纵,也可从工作方式上避免操纵手的误操作引发的航行事故。技术要点包括:
1)在长时间稳定航行或自主航行模式下,摇杆或坐姿中位操纵台设计有自主操纵模式。接通此模式后,航行器将维持接通前的航行状态并保持航行,摇杆设备操纵信号自动切断。再次的触发该开关将进入带限幅器的增量操纵方式。坐姿式中位操纵器则可采用有人座舱操纵机构实现安全操纵。
2)自动航行操纵面板有一套严谨的航行模态切换逻辑[6],该切换逻辑进行了兼容性测试,并带有自我保护功能。
3)操纵系统信号在发送前或接收后,通过加入合理的滤波和柔化环节[7]实现实时的坏点消除和操纵软化两个功能。其中实时坏点消除能尽量避免恶劣电磁环境下的不良信号干扰或软件系统的错误,操纵软化则能缓和操纵输入信号,甚至可滤除那些引起PIO不良频段操纵信号,并消除意外的或过大的、过快的操纵对航行体隐性的损伤。由于操纵信号的改良,执行机构信号舒缓柔和,而内回路的反馈特性也将得到改善。这也是提高舵机寿命、减缓机件疲劳的一个重要技术手段。
4.2 无线数传信道工作失常的安全控制策略
不管采用何种通讯方式,错帧、漏帧甚至是无线信号完全中断是不可避免的。当无线数传通信彻底失败时,航行器的自动返航将是重要的自救手段。
在安装了GPS系统的前提下,安全控制计算机可根据导航数据,通过航行控制计算机控制航行器自动返航,具体流程是:
1)安全控制计算机的航迹记录功能记录从出发点到事故点的航迹、航姿和航速。
2)无线数传移动站自动检测到故障,并发送设备故障状态到安全控制计算机。
3)因来时航线是唯一可信航线,根据安全控制计算机记录的GPS信息,启动自动航线规划功能,由安全控制计算机发送航行指令,航行器将沿来时航线返航。
4)在返航过程中,无线数传系统不断地发送查询指令,如果恢复通信,则由综合控制系统接管控制,安排下一步工作计划。如果无线数传系统一直无法正常工作,则在航行器靠近母船时,执行回收作业,然后检测无线数传系统的故障。
5 硬件系统故障下的安全控制策略
由于半潜式航行器是无人的航行器,一旦硬件系统出现故障,包括传感器失灵、系统死机或信号异常,都可能导致严重的航行事故。出于成本和有效荷载的考虑,半潜式航行器大多没有冗余设计[8]。一旦系统硬件失灵,包括航姿、航速和航向反馈失灵,安全控制计算机将无所适从,此时建议的安全控制策略是:
1)安装复合式多冗余度传感器系统;若无备份传感器系统,则
2)安全控制计算机立即切断相关传感器通道,并及时实现软件的故障隔离,防止污染计算机软件系统。
3)若姿态传感器失效,则安全控制计算机自动获取故障前时刻传感器状态中的相关参数作为系统目标参数。
4)若航行速度信号失灵,则采用加速度和姿态信息获得近似的航行速度变化量,实施非精确的减速。视距范围内可由操纵手目视接管等措施。
5)一旦所有传感器失效,或安全控制计算机故障隔离措施不当而导致软件系统遭受污染,安全控制计算机此时进入高度紧急状态,自我保护程序启动后努力使航行器接近稳定状态航行,并减速至悬停[9]状态,发送GPS信息至母船,原地等待救援。
传感器失效是一种常见的、对航行安全有重大影响的系统硬件故障,但仍有挽救的可能性。相比之下,航行控制计算机死机、内部信号线松脱、执行机构卡死和电源失效对航行安全的影响更严重。
6 柴油机故障安全控制策略
柴油机是半潜式航行器动力装置中最重要的机械设备[11]。由于柴油机结构复杂,工作条件恶劣,发生故障的可能性极大,一旦发生故障,将会影响整个航行器的动力装置工作,危及航行器的安全。此时建议的安全控制策略是:
1)首先将水平舵打至最大上攻角,维持原航行姿态和航向基本不变,此时航行器基本失去动力,航速会慢慢降低。
2)启动浮力调节系统,利用水箱调节航行器的重力,使航行器在完全失去动力时,能处于悬浮状态。
3)当航行器处于悬停状态时,由GPS获取自身的位置信息,并通过无线通信系统传送给母船,原地等待救援。
7 结语
本文将影响半潜式航行器安全航行的主要因素作了归纳,总结了四种主要的故障类型,并根据半潜式航行器航行的特点,提出了一系列的安全自救措施,以及在航行控制系统中实现的策略。
进一步的工作主要是将上述思路在产品上开展工程实现的工作,逐步实现内置的自救控制模块。
[1]曹龙汉,曹长修,孙颖楷,等.柴油机故障技术的现状及展望[J].重庆大学学报(自然科学版),2001,24(6):134138.
[2]元建胜.海上避碰专家系统的设计[D].哈尔滨:哈尔滨工程大学,2002:2025.
[3]吴兆麟.海上避碰与交通安全研究[M].大连:大连海事大学出版社,2001:138149.
[4]苏开文.船舶避碰专家系统的研究[D].大连:大连海事大学,2007:1525.
[5]丁玉兰.人机工程学[M].上海:上海交通大学出版社,2004:1524.
[6]LonChen Hung,HungYuan Chung.Decoupled slidingmode with fuzzyneural network controller for nonlinear systems[J].International Journal of Approximate Reasoning2007,46:7497.
[7]李欣源.柔性双轮自平衡机器人的建模与控制研究[D].北京:北京工业大学,2010:8599.
[8]张均东,任光,孙培廷.舰船监控网络中的冗余设计和实现[J].中国造船.2002,43(3):99104.
[9]施生达.潜艇操纵性[M].北京:国防工业出版社,1995:1049.
[10]单承刚.基于S3C2410的超声波避障系统设计[J].计算机与数字工程,2009(2).
[11]郭江华,侯馨光,陈国钧,等.船舶柴油机故障诊断技术研究[J].中国航海,2005,65(4):7578.
猜你喜欢
房地产导刊(2022年5期)2022-06-01
商品与质量(2021年43期)2022-01-18
海洋通报(2021年5期)2021-12-21
海洋石油(2021年3期)2021-11-05
计算机测量与控制(2021年8期)2021-08-23
建材发展导向(2021年7期)2021-07-16
全球定位系统(2020年3期)2020-07-15
建材发展导向(2019年5期)2019-09-09
载人航天(2019年1期)2019-03-07
航空模型(2016年5期)2016-07-25