浅析SHADOWS 合成孔径声纳的数据成像处理技术
2013-08-06 10:59:00谢敬谦赖新云
海洋技术学报 2013年2期
刘 昆 ,牟 健* ,谢敬谦 ,赖新云,郑 洁
(1.国家海洋局南海分局,广东 广州 510300;2.国家海洋局南海维权技术与应用重点实验室,广东 广州 510300)
海洋开发管理、水下物体探测、科研调查、军事活动都需要高效清晰的水下观测方法。在人们所熟知的各种辐射形式中,以声波在海水中的传播最佳。在浑浊和含盐的海水中,无论光波或电磁波的衰减都远较声波的衰减为大。水声成像技术是利用声波在水下传输特性来进行水中目标物体成像、探测、识别和定位的技术,在军事作战、海洋调查、水下勘探、海洋工程、鱼群探测、海洋权益维护等方面发挥着重要作用。
合成孔径声纳(Synthetic Aperture Sonar,SAS)技术是目前世界上最先进、应用最为广泛的水下探测成像技术。它以合成孔径理论为基础,借鉴合成孔径雷达的技术,以实现用小尺寸声纳基阵和低工作频率满足不同探测距离的高精度成像需求。因此,合成孔径声纳可以获得均匀恒定的高分辨率空间图像,能比一般的声纳图像高1~2个数量级[1]。
目前,合成孔径声纳是国内外海洋声学成像领域的研究热点。合成孔径声纳的研究始于20世纪60年代,美国Raython公司开始进行原理研究,并取得了相关专利。但由于声纳载体不规则运动及水下复杂的声学环境影响,制约了该技术的发展;20世纪80年代末,随着合成孔径成像雷达的研制成功和广泛应用,通过借鉴合成孔径雷达的技术成果,推动了合成孔径声纳技术的飞跃发展;到了20世纪90年代,合成孔径声纳的研究受到欧美发达国家的普遍重视,合成孔径声纳研究开始活跃起来。欧美在这方面处于领先地位,并于这个时期先后研制出了样机和成熟的产品投入市场。进入21世纪之后,欧美大国已经开始在军事领域和民用领域大范围的应用合成孔径声纳系统开展水下成像工作。我国在国家高技术研究发展计划(863计划)的支持下,从20世纪90年代末开始启动合成孔径声纳的研制工作。国内多家知名高校和研究所参与其中。经过10多年的不断探索和发展,我国在合成孔径声纳理论及关键技术方面取得了长足进展和较大突破,已经研制出了合成孔径声纳样机,并完成了一系列试验,但目前还尚未真正投入使用[2]。
高分辨率的成像处理技术是合成孔径声纳研究的难点和关键。本研究借鉴合成孔径雷达的成像处理技术和相关算法,通过对海上现场实测的合成孔径声纳原始数据进行解析和处理,实现了国内首次应用合成孔径声纳系统进行水下高分辨率成像。该成像处理技术可以为我国在合成孔径声纳的研制和应用方面提供实践参考。
1 SHADOWS合成孔径声纳数据格式
1.1 SHADOWS性能简介
SHADOWS是法国IXSEA公司采用军事声纳的前沿水声学成像技术,最新开发研制的世界上第一套商用合成孔径声纳成像系统。该系统的原理是利用小尺寸声纳基阵匀速直线运动来虚拟大孔径声纳基阵,以实现在大量程下的恒定高分辨率成像。该系统性能技术指标为:前置声纳频率300 kHz;侧扫声纳频率100 kHz;覆盖宽度1 000 m;分辨率:实时恒定15 cm,后处理后理论上可达5 cm;发射通道每侧3个;接收通道每侧24个;水下定位精度为斜距的0.2%;覆盖角200°。该系统的结构示意图如图1所示[3]。2010年国家海洋局引进了国内第一套SHADOWS合成孔径声纳系统,并对该系统进行了多次海试及成像处理技术的研究。
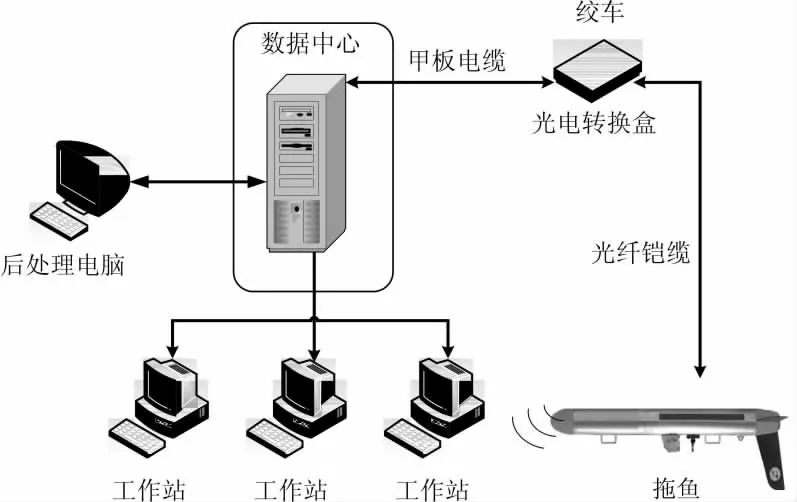
图1 SHADOWS 合成孔径声纳结构示意图
1.2 XTF格式
在介绍算法之前,首先介绍一下数据格式。SHADOWS合成孔径声纳的原始数据采用XTF文件格式。XTF格式(eXtended Triton Format)由Triton公司创建,用于在一个文件内存储多种不同的数据源信息。因此,可以用来存储多种类型的设备数据,包括导航数据、声纳数据、测深数据及遥测数据。这种数据格式保留了原有设备的数据格式,更方便将来数据的扩展和处理。
XTF文件由许多数据包组成,每个数据包前面都有关于数据类型和大小的说明。所有XTF文件都是由文件头开始。文件头由一个头部说明和CHANINFO结构组成,整个形成一个XTF文件头的结构。目前常用的XTF数据文件有测深数据、声纳影像数据、姿态数据和位置数据[4]。XTF文件整体结构如图2所示。
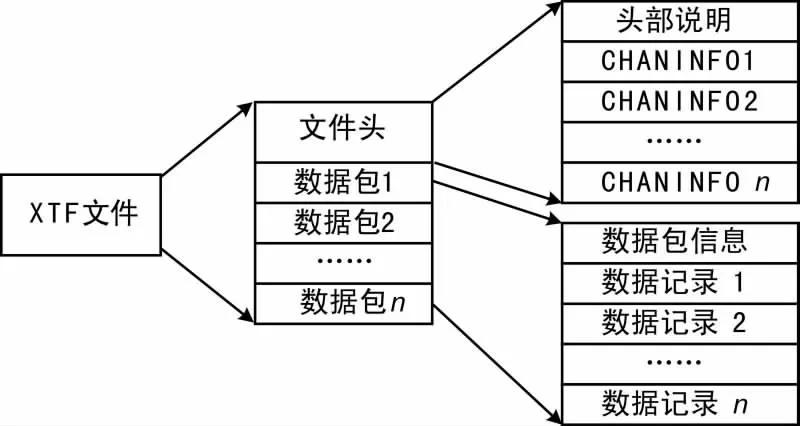
图2 XTF 格式文件结构
1.3 SHADOWS文件格式
SHADOWS合成孔径声纳的XTF格式文件包含的信息量很大。它由文件头和数据包组成,最小的组成单元是记录,每个记录的长度均为8 192字节。每个文件都包括不同的数据包,根据文件头的标识信息来识别数据包的类型。SHADOWS合成孔径声纳的XTF格式文件主要包括文件头、位置数据包、姿态数据包与声纳数据包等。其中声纳数据包又包含系统参数数据、波束数量数据、波束相位数据与波束质量数据等。经ISDA软件解析后,其原始数据如图3所示。
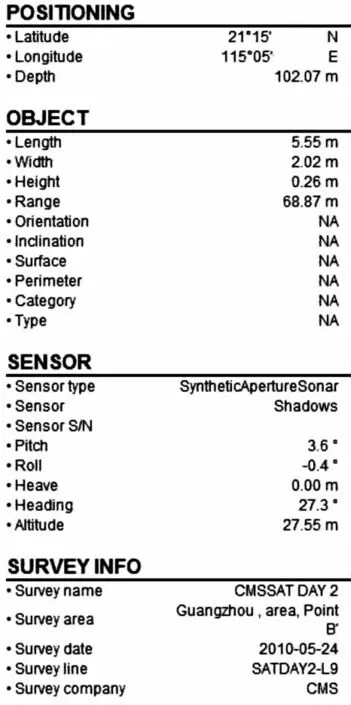
图3 原始数据解析截图(部分)
2 SHADOWS合成孔径声纳成像算法
2.1 合成孔径声纳算法
合成孔径声纳的成像算法研究是合成孔径声纳研究的重点,也是当今声纳成像算法研究的难点。合成孔径声纳利用对目标物体多次发射声波并叠加回波的特殊聚焦算法,来取代传统声纳的单次发射声波并接收回波信号的聚焦方法,从而形成等效的大孔径,实现在大量程下的高分辨率成像。它所要解决的问题是:如何把从空间不同顺序位置采集到的原始回波数据,精确、高效、清晰的形成虚拟大孔径基阵的高分辨声纳图像。声纳图像是三维空间物体形状在二维图像空间的投影。因此,合成孔径声纳成像算法是二维的:一维是空间采样信号;一维是时间采样信号。图像成像过程是声纳根据回波信号解算出声纳图像的过程,相应的计算方法称之为成像算法。合成孔径声纳成像算法可以用空间波束形成及叠加的概念来描述[5],其原理如图4所示。其公式可表述为:

式中:r0是目标到基阵平台匀速直线运动轨迹的距离;y0是目标在基阵平台运动方向的位置;(r0,y0)是目标在像平面上的坐标;sj(t,yj)是基阵在位置yj处收到的目标回波信号;τj是目标的时间延迟;Wj是加权系数。
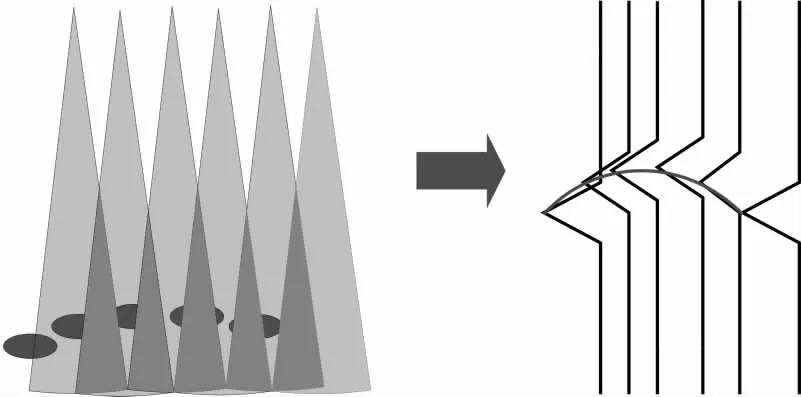
图4 成像原理示意图
合成孔径声纳数据成像算法可分为时域成像算法和频域成像算法两类。主要包括Range Doppler(RD)算法、Chirp Scaling(CS)算法和∞—k 算法等。以波束形成为基础的逐线时域成像算法,是适合多波束形成的成像算法。它具有数学模型简单、物理意义清晰、对视斜视兼容性好等特点,是理论上“最精确”的算法[6]。同时在算法实现方面,它还具有坐标系选取灵活、并行实时处理、任务分配方便、运动姿态补偿直接简便等优点。因此目前多波束合成孔径声纳成像算法大多采用逐线时域成像算法。这方面研究现在已经取得了一定进展,其中一种算法是借鉴医学CT成像中的后向投影算法(back projection,BP)而建立的快速分块反向传播投影(fast factorized back propjection FFBP)算法。该算法现已经成功应用在合成孔径雷达的成像处理。
2.2 FFBP算法
FFBP成像算法本质上是一种计算量和计算精度折衷的算法,在降低计算量的同时引入声学误差。FFBP算法是在极坐标系下进行计算的,通过因式分解,将全孔径分解到极短的孔径长度,采用极线图像来近似区域图像,通过孔径合并和图像分裂,迭代的步骤来完成合成孔径成像。因此,一个完整的FFBP算法由孔径合并和图像分裂两个部分组成,而且算法是迭代实施的[7],如图5所示。FFBP合成孔径声纳成像算法可以在保证成像质量的前提下大大降低成像的计算量。由于其具有时域成像算法灵活性高的优点,因而非常适合用于实时合成孔径声纳的信号处理,可以通过普通的服务器实现运算,大大降低信号处理系统的成本和难度,提高了设备的通用性。同时,FFBP成像算法采用的孔径合并是迭代进行的,这种迭代计算的中间结果也可用来计算声纳基阵的运动轨迹和姿态误差;这样就使得采用FFBP算法在迭代中进行运动姿态补偿变得更简单,成像质量也会更高;在能够获得基阵平台实时运动参数的情况下,该算法能更适应低信噪比环境和剧烈运动干扰的运动姿态补偿。
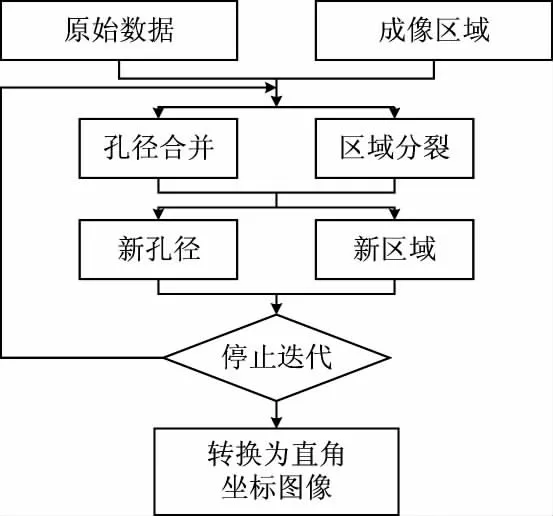
图5 FFBP 算法结构示意图
孔径合并可以描述为:在极坐标系中,假设极线与坐标轴Y 的夹角为θ,合并后孔径中心(yc,0),n 个孔径合并的过程可以描述为式(2):


同时,为保持恒定的分辨率,伴随着孔径的不断合并,极线所能近似的图像区域会越来越小,这个过程即图像分裂,分裂后图像区域的大小可根据式(3)计算得到。

式中:Dm为图像区域的大小;DL为孔径长度;Rmin为最小距离;E 为误差系数;λ 为波长。
SHADOWS合成孔径声纳采用船尾拖曳航行的方式进行工作,拖鱼离海底的高度一般控制在30 m左右。由于拖鱼在水中航行时受到水流和拖曳船只的影响,会产生较大的噪音和运动姿态误差,从而造成图像散焦,因此必须进行实时的信号处理和运动姿态补偿,而FFBP算法正好能满足这方面的技术要求。
3 SHADOWS合成孔径声纳成像应用实例
3.1 海上实测
本次测试的海域水深100 m左右,根据以往的调查项目资料,该区域海底存在一条管线。测试当天,海况2级,风力3级,浪高1 m,海况对采集到较好的数据质量有利;且该海域水深较大,采集到的数据适宜进行成像处理。作业船只为中国海监1 500 t级执法调查船。
在已知管线垂直方向布设5条测线,每条测线长1 500 m,间距300 m;平行已知管线方向布设1条测线,测线距离管线150 m,如图6所示;以5 kn速度匀速跑完测线,记录数据。采集数据的同时,实时显示声纳图像;待数据采集完成后,再应用FFBP成像算法对采集到的XTF格式原始数据进行后处理并成像;然后对比两种处理方法测量到的管线图像,分析其精度、分辨率和处理时间等差异。
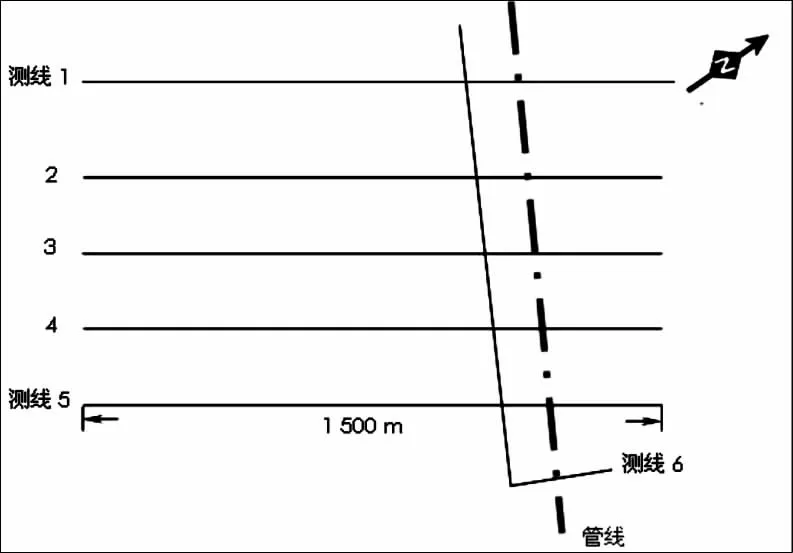
图6 管线测试航迹示意图
3.2 实测结果分析
对经过FFBP算法处理后的信号(上)和实时采集到的信号(下)进行分析对比,从图7可以明显的看出,经过FFBP算法处理后的信号,要比实时采集到的信号曲线更平滑,“毛刺”更少,主瓣更高,旁瓣更低,信噪比更好。
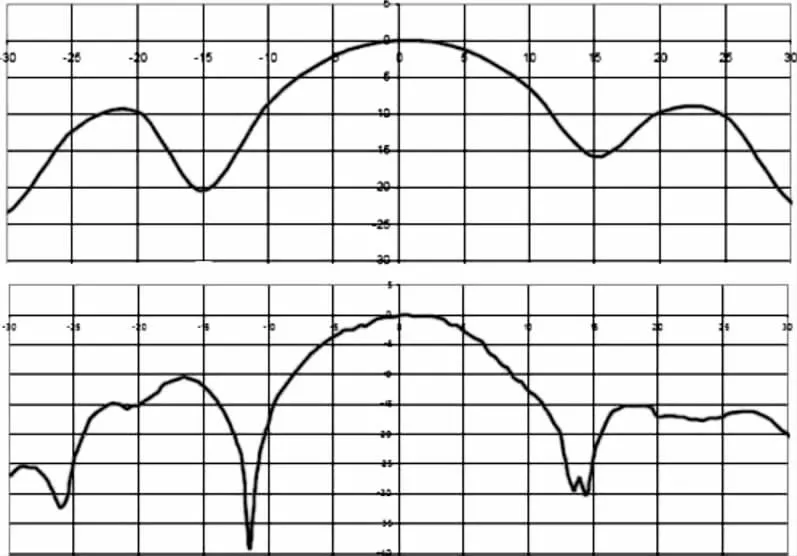
图7 处理后的信号和实时信号对比截图
对经过FFBP算法处理后的图像(左)和采集时实时显示的图像(右)进行分析对比,从图8可以明显的看出,FFBP算法的图像结果与实时显示的图像基本相同,FFBP算法图像结果中没有遗漏任何地形地貌细节。但经过FFBP算法处理后的图像,要比采集时实时显示的图像分辨率要高,更清晰;不过,FFBP算法处理的数据量也更大,所需时间更长,大约是实时显示图像所需时间的3倍左右。

图8 处理后的图像和实时图像对比截图
4 总结与建议
4.1 总结
相对于传统的实验室理论仿真实验,本次海上实测,首次实现了国内场实时采集合成孔径声纳的原始数据,并对原始数据的格式进行了研究和解析;此外,还采用快速分块反向传播投影(fast factorized back propjection FFBP)算法进行成像后处理,对合成孔径声纳的整个成像过程,通过理论结合实践的方式,验证了该成像处理技术的可行性和适用性。由于在成像处理技术方面的优越性,SHADOWS合成孔径声纳系统图像不存在失真现象,成像分辨率较高,通过后处理分辨率能达到10 cm以内;对目标物定位精度能达到±1 m以内;在镶嵌图方面,由于FFBP算法可以通过水下定位系统的数据进行实时运动姿态补偿,故镶嵌图像上的成像连续性较好,没有因明显跳线而产生错位的现象。
4.2 建议
由于这是我国引进的第一套SHADOWS合成孔径声纳系统,所以实际工作中该系统的操作经验非常重要。经过多次的海上测试,发现该套系统采集到的原始数据质量受拖鱼在水中航行姿态影响较为明显,建议应用流体力学理论专门研究拖鱼姿态与海况、航速及流速之间的关系;另外,该系统目前只能二维平面成像,如果加装多波束测深探头,可以实现干涉合成孔径声纳三维立体成像,从而能够探测到悬浮在水中的物体,提高该套系统的探测能力,但相应的三维立体成像处理技术会更复杂,建议以后进行专门的三维立体成像处理技术研究;最后,该套系统的XTF格式数据文件经过后处理,其数据可以转换生成地理信息系统(GIS)的GeoTIFF格式图像文件,这为使用地理信息系统开发合成孔径声纳的图像数据库打下基础,建议今后在这方面进行深入的研究,以达到快速识别图像的目的。
[1]牟健,贺惠忠,姜峰.SHADOWS合成孔径声纳系统及性能测试[J].中国海洋大学学报,2011,Z2:159-163.
[2]钱刚.合成孔径声纳技术研究[D].西安:西北工业大学硕士学位论文,2003.
[3]Bucknam JN.SHADOWS Synthetic Aperture Sonar System Operator manual[M].FRANCE:IXSEA,2010:1-10.
[4]武法东,付宗堂,王小牛,等.地理信息系统基本原理[M].北京:电子工业出版社,2001.
[5]PINTOMA.High resolution sea floor imaging with synthetic aperturesonar[J].IEEEOceanic Engineering Society Newsletter,2002,3:15-20.
[6]张春华,刘纪元.(第二讲)合成孔径声纳成像及其研究进展[J].物理,声纳技术及其应用专题,2006,35(5):408-413.
[7]Lars M H Ulander,Hans Hellsten,G Stenstrom.Synthetic-aperture radar processing using fast factorized back-projection[J].IEEE Transaction on Aerospace and Electronic Systems,2003,39(3):760-776.
猜你喜欢
潍坊学院学报(2021年2期)2021-07-22 07:59:24
考试与评价·八年级版(2020年5期)2020-10-29 05:42:35
装备制造技术(2020年12期)2020-05-22 09:24:54
电脑知识与技术(2019年13期)2019-07-08 02:23:41
水下无人系统学报(2018年5期)2018-11-09 07:40:54
电子测试(2018年14期)2018-09-26 06:04:12
声学与电子工程(2017年1期)2017-06-22 11:30:07
火控雷达技术(2016年2期)2016-02-06 02:29:03
西北工业大学学报(2015年3期)2015-12-14 13:08:44
声学技术(2015年1期)2015-09-07 06:44:52