
无砟轨道路基静压式沉降监测系统及其标定
2013-08-04 06:34罗丽萍董勇峰朱洪涛胡志新
铁道标准设计 2013年5期
罗丽萍,董勇峰,朱洪涛,胡志新
(南昌大学机电工程学院,南昌 330031)
无砟轨道因其具有轨道几何变形小、轨道平顺性好、结构可靠性高、维修工作量少等特点,在高速铁路得到广泛应用[1-2]。路基作为轨道的基础,路基是铁路的重要组成部分[3]。客运专线无砟轨道对路基工程的工后沉降要求严格,虽然在初始设计中对土质路基进行了沉降变形计算,并采取了相应的设计措施[4-6],但是影响沉降计算的因素非常多,使得沉降计算的精度不足以控制无砟轨道的工后沉降,而路基的沉降影响铁路运行的安全性和平顺性。为保证客运专线无砟轨道的工程质量和列车安全、平稳、舒适的运行,监测和控制沿线方向构筑物的差异沉降是路基工程的一个关键环节[7-8]。路基工后沉降是高速铁路路基工程重点研究的内容之一,路基工程质量的成败也主要取决于对路基沉降及工后沉降的监测和控制。
目前典型的沉降监测系统主要有水管式沉降仪[9],水管式沉降仪是利用连通管原理来观测监测点的沉降。根据连通自由液体不同高程点存在液面差的原理来监测路基沉降的方法具有可联网、能连续自动化监测、精度较高的特点,但采用自由液体时依然存在受环境影响大、动态响应慢、现场施工困难、维护成本高、占用场地大等问题,不利于恶劣环境的应用和沉降突发状况的及时处置,同时也会对施工造成较大影响,后期维护工作量也会较大。
静压式沉降监测系统是一种用于监测被测对象沉降量的监测系统,可用于铁路路基等大型建筑物沉降的实时监测。静压式沉降监测系统中的压力在密闭液体中传播速度近似声速,路基沉降值可通过系统里的压力变化显示出来,其动态响应高;直接以沉降值输出为最终输出,不存在中间转换计算误差,很好地提高监测系统的精度;具有自动监测和超限报警,精度高,动态响应快,不影响现场施工等特点。
1 静压式沉降监测系统原理
1.1 静压式沉降监测系统的构成
无砟轨道路基沉降监测系统主要由2个工作测头、1个基准测头、液体加注口以及排气口等组成。系统构成如图1所示。设置液体加注口应当略高于排气口。基准测头通过连通管与工作测头联通,通过液体加注口给系统添加液体介质,系统内空气经由排气口排出,形成密闭液体。基准测头应设置在稳固、可靠、不易被破坏和便于测量的地方,并采取防冻、防沉降和抗移动处理,其基座设为0号,1号工作测头和2号工作测头分别埋设在路基、桥涵、隧道及过渡段等需要监测的位置,其基座设为1号基座和2号基座。
基准测头的功能是监测系统由于受到温度、气压变化或管路挤压等外界因素变化引起的压力变化值,工作测头是监测其对应基座沉降时和外界因素变化引起的压力变化值。基准测头和工作测头所测的信号经过信号线传至管理计算机,基准测头和工作测头的压力变化差值即是对应的路基因沉降引起的压力变化值,管理计算机经过数学处理将工作测头所测的沉降值显示及存储起来。系统能同时监测2个基座的实时沉降值,可以根据实际需要增加或减少工作测头的数目。
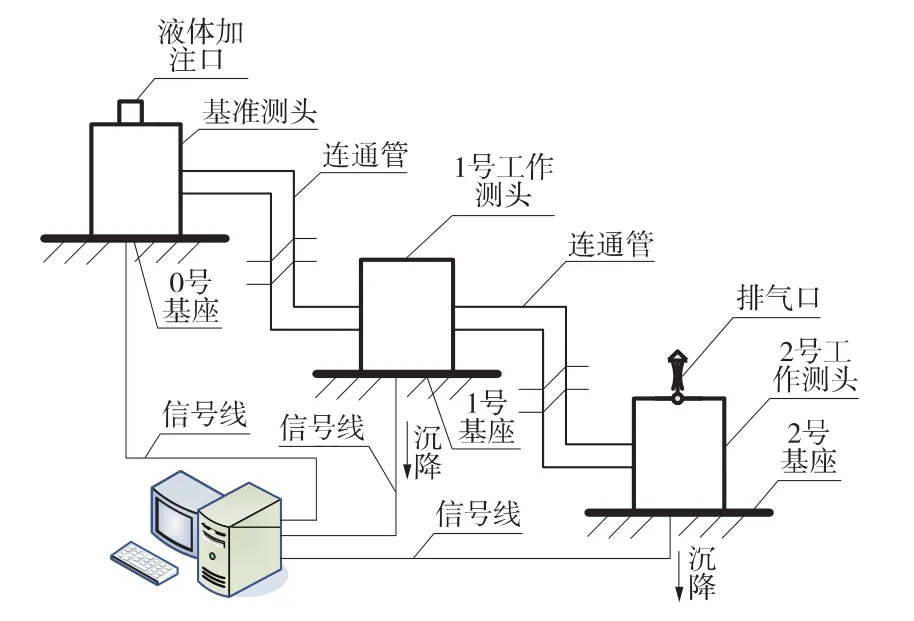
图1 无砟轨道路基沉降监测系统示意
1.2 静压式沉降监测系统原理
帕斯卡原理[10],盛放在密闭容器内的液体,其外加压力发生变化时,只要液体仍保持其原来的静止状态不变,液体中任一点的压力均将发生同样大小的变化。
根据帕斯卡原理,当密闭容器内的液体某一点受到由温度、气压变化或者管路受到挤压等外界因素引起的压力变化时,液体相对于容器并不产生相对运动,该点压强变化会等值地以近似声速传递到各点,迅速使密闭容器内各处的压强都发生同样大小的变化,但由于重力的原因,密闭容器内静止液体不同高程点仍然存在与高程差成正比的压力差Δp,即

式中,Δh为高程差,m;ρ液为液体的密度,kg/m3;g为重力加速度。
现实环境存在各类噪声,如气温、气压变化等,皆能以共模形式影响着系统输出。为此,监测系统采用差动驱动提高共模抑制比,即利用密闭液体中压力差来监测不同沉降点高程差变化。当设基准测头沉降为零,工作测头随其对应的路基发生沉降时,其基准测头和工作测头之间高程差变化就是工作测头监测沉降点的沉降值,通过基准测头和工作测头里的压力变化差值表现出来,即

式中,Δh基为基准测头的高程差,m;Δp基为基准测头的压力差,N/m2;Δh-Δh基为工作测头所监测的沉降值,m。
其基准测头的高程沉降是由于现实环境中的各种噪声引起的压力变化所换算出来的,并不是基准测头所发生的沉降。
由液体静力学可知,密闭液体中压力的传递速度接近于液体中的声速,远大于机械摆或液体摆等受重力的影响而产生的机械运动的速度[11-12],故其频响明显高于各类基于液面差的水管式沉降监测,明显提高了系统的动态响应。
2 静压式沉降监测系统的标定原理
2.1 静压式沉降监测系统的标定原理
在明确输入-输出变换对应的前提下,利用某种标准量或标准器对传感器的量值进行标度称之为标定[13]。为确定沉降监测系统的输入-输出关系,消除系统误差并提高测量的精度,需要对监测系统进行标定。
由图1可知,沉降监测系统包含2个工作测头,每个工作测头能够监测1个点的沉降。为了最大消除工作测头之间由温度、气压变化等偶然因素引起的误差,采用对沉降监测系统的每个工作测头同时标定方法,即在标定读数过程中,同时读取每个工作测头的数值。
基准测头与工作测头采用差动连接的方法能够消除由于湿度、温度等外界因素引起沉降监测系统内压力的波动。虽然系统内的每个测头会因某些外界因素改变其输出值,但是,同样的压力改变值会传递到每个测头,通过工作测头与基准测头的压力变化差值来计算每个工作测头所测到的实际沉降值,消除了由外界因素引起的误差。
2.2 静压式沉降监测系统的标定方法
每个测头中的压力传感器虽然在出厂时就标定好了,但是每个测头在生产、装配等过程中存在误差。由式(2)可知,无砟轨道路基沉降监测系统的输入-输出是线性的。为了使拟合直线在全量程范围内拟合精度高,尽量减少使用时的测量误差,采用一元线性回归法来拟合输入-输出的关系,使整个标定过程中误差的平方和Q最小。
设定沉降监测系统中测头的一元线性回归的回归方程为

式中,k、z是回归方程的回归系数;x为测头压力变化的差值为压力的回归值,Pa。
设在全量程内取N个标定点,用矩阵表示,令

式中各矩阵元素
υ1,υ2,…,υN为 N 个直接测量结果的残余误差;
y1,y2,…,yN为 N个直接测量结果;
k,z为2个待求的被测量的估计值;1,x1,…,xN为N个误差方程的N×2个系数。则式(3)的矩阵形式为

根据最小二乘法原理,回归系数的矩阵解为

将 Y、X、b、V 代入式(5),解得 z,k,即
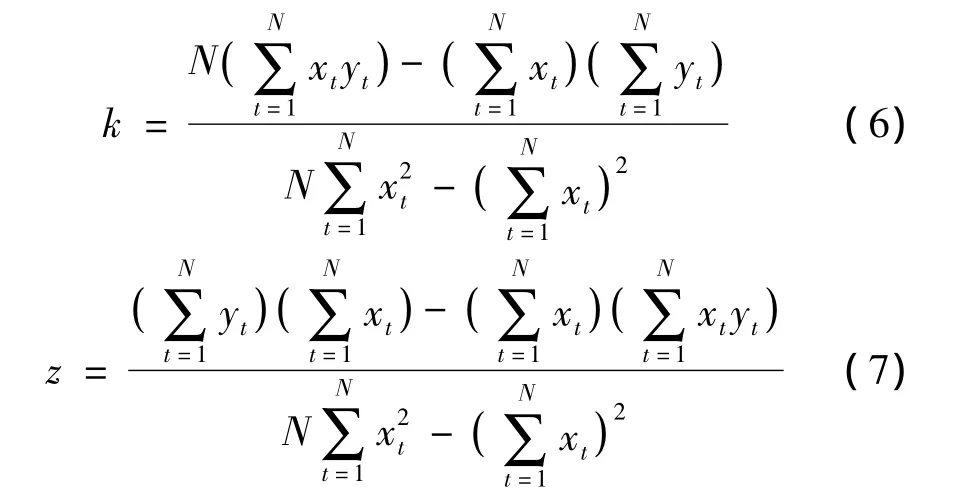
将式(6)和式(7)代回式(3),得标定后的回归方程为

3 实验与结果分析
为验证本沉降监测系统标定方法的合理性,本文设计了相应的实验方案并进行了验证。
实验方案系统构成如图1所示,其中采用蒸馏水作为工作介质。常温室内条件下,基准测头及工作测头置于升降台上并精确找平。采用0.05级活塞式压力计以得到标准的输入量,每个测头通过数据采集电路采集压力传感器的信号并上传到管理计算机。通过给系统持续加压,记录每个测头的输出值,可得不同压力条件下的输出{xi|i=1,2,…}。为减小偶然误差,测试在重复性条件下连续进行7次并求平均值,其平均值¯xi作为当前压力下系统的输出。得到输入-输出关系如图2所示。
由图2和式(8)得到基准测头、1号工作测头与2号工作测头的输入-输出方程分别为

无砟轨道路基沉降监测系统使用不同的标定方法所得的结果存在差别,标定结果是否提高了其精度可使用一种常用的方差分析法,其实质是对N个观测值与其算术平均值之差的平方和进行分解,将对N个观测值的影响因素从数量上区分开,然后用F检验法对所求回归方程进行显著性检验[14]。

图2 沉降监测系统各测头标定曲线
回归平方和U反映了在y总的变差中x和y的线性关系,即
残余平方和Q反映了所有观测点距回归直线的残余误差的平方和,即

采用F检验法检验回归方程式(8)是否显著,回归平方和的自由度为1,残余平方和的自由度为N-2,即

将式(9)和(10)代入式(11)得

将试验数据代入式(12)得

F1、F2、F基检验结果高度显著,说明1号工作测头和2号工作测头的非线性误差很小,一元回归方程拟合结果较为理想。
4 结语
本文介绍了无砟轨道静压式路基沉降监测系统及其原理,并提出了基于一元线性回归原理的系统标定方法。理论分析及实验结果显示。
(1)静压式路基沉降监测系统利用测头间压力差测量高程变化,其具有环境变化自动补偿、动态响应快、布局简便、扩展性好及精度较高等特点,适合对无砟轨道路基的自动连续监测。
(2)为得到系统的输入-输出关系,提出采用一元线性回归方法进行标定,一元线性回归可以有效消除测量噪声,进而得到模型参数的最可信赖值估计。通过测量数据对线性模型参数的F检验,显示该回归方程显著,说明一元回归方程拟合结果较为理想。
[1]中华人民共和国铁道部.铁建设函[2005]754号 客运专线无砟轨道铁路设计指南[S].北京:中国铁道出版社,2005.
[2]全顺喜,王平,伍曾.客运专线无砟轨道道岔精调系统的研究与应用[J].铁道标准设计,2010(2):36-39.
[3]郝瀛.铁道工程[M].北京:中国铁道出版社,2000.
[4]周诗广.大跨度桥上铺设无砟轨道结构设计研究[J].铁道标准设计,2011(3):1-5.
[5]熊林敦.高速铁路路基设计中有关问题的回顾与思考[J].铁道标准设计,2011(8):1-3.
[6]中华人民共和国铁道部.TB 10621—2009 高速铁路设计规范[S].北京:中国铁道出版社,2009.
[7]秦尚林,陈善雄,许锡昌.路基沉降预测的拓展指数曲线模型[J].铁道标准设计,2010(2):28-30.
[8]李明领,周全能,陈善雄,等.试论铁路客运专线沉降变形观测评估工作模式[J].铁道标准设计,2010(2):7-10.
[9]霍家平,陈生水,姜继承,等.DCJ-1型电测水管式沉降仪及应用[J].水电自动化与大坝监测,2002(4):41-44.
[10]左健民.液压与气压传动[M].2版.北京:机械工业出版社,2009.
[11]朱洪涛,钟爱平.高程差传感器信号处理[J].传感器与微系统,2010(6):87-88.
[12]朱洪涛,方华伟,王志勇.一种新型高程差传感器的研究[J].传感器世界,2006(1):23-26.
[13]贾伯年,俞朴,宋爱国.传感器技术[M].3版.南京:东南大学出版社,2007.
[14]费业泰.误差理论与数据处理[M].4版.北京:机械工业出版社,2000.
猜你喜欢
建材发展导向(2021年15期)2021-11-05
汽车维修与保养(2020年11期)2020-06-09
化工设计(2020年6期)2020-01-13
制造技术与机床(2019年10期)2019-10-26
智富时代(2019年2期)2019-04-18
智富时代(2019年2期)2019-04-18
制造技术与机床(2018年8期)2018-10-09
制造技术与机床(2018年9期)2018-09-19
劳动保护(2018年8期)2018-09-12
中国惯性技术学报(2017年1期)2017-06-09
