
城轨车载ATP系统的仿真设计与实现
2013-07-30 10:35邓子渊
铁道通信信号 2013年2期
邓子渊
邓子渊:兰州交通大学电子与信息工程学院 硕士研究生730070 兰州
列车自动防护系统ATP是基于通信的列车控制系统CBTC(Communication Based Train Control)的核心安全控制部件,依托车-地双向通信和计算机控制,缩短行车间隔,增大运营密度。车载ATP通过安全防护曲线的计算,实时监控列车运行速度,保证列车的可用制动距离,从而使列车安全高速运行。
资料表明,从20世纪80年代开始,国外就已经开始在ATP技术领域展开新的研究。近些年为了缓解日益严重的城市交通拥塞状况,我国正大力研发CBTC技术。在ATP系统的研究中,如果只进行实体开发,不仅经济成本过高,而且成果孵化周期长。若以计算机仿真搭建试验平台,能够有效降低研发成本,对ATP系统的研究达到事半功倍的效果。
本文的ATP仿真研究正是基于CBTC技术,根据IEEE 1474.1TM标准规定的安全制动模型,按照行车最小追踪间隔,实现计算机仿真列车运行。
1 ATP系统分析
1.1 ATP系统的构成
基于CBTC的ATP系统主要由区域控制中心、无线局域网通信系统和列车车载子系统3部分构成,如图1所示。
区域控制中心:负责从轨道电路、道岔、信号机等轨旁设备采集信息,并与列车自动监控系统ATS共同完成计算机联锁的安全处理与控制;根据轨道电路占用情况、线路数据以及进路联锁状态进行轨道电路编码,传递给ATP车载设备;相邻区域控制中心之间会进行信息交互。
无线局域网通信系统:主要包括地面骨干网络、无线网络地面接入点 (AP)和车载无线设备。它是CBTC技术中车-地双向通信的根本,传送列车状态、控制命令等重要信息。
列车车载子系统:是保证行车安全的核心部件,负责接收通信系统信息,计算ATP防护曲线,监控列车运行,发出控制命令。
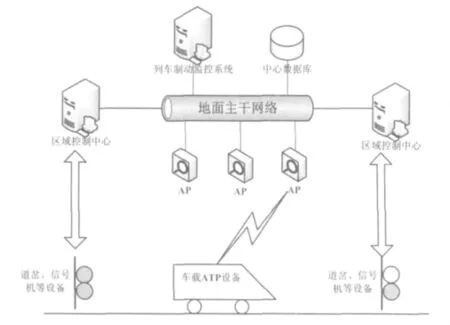
图1 ATP系统的构成
1.2 ATP仿真数据模型的建立
为了实现交互式网络应用程序,根据ATP系统的构成,需要进行数据库的数据模型设计。如图2所示,通过CDM建模的可视化表达,可以清晰地看到ATP计算中的数据关系。区域控制中心主要监视辖区范围内的线路信息、设备信息和列车位置信息。通过列车位置信息可以颁发给该列车有效移动授权 (LMA)。仿真系统根据移动授权,访问数据库查询线路信息,建立对应该列车的进路表。该表记录了列车车载ATP实时计算防护曲线所需的必要信息,如线路坡度、曲线半径、限速等。本仿真选取Power Designer为建模工具,可以有效进行CDM到SQL脚本的转换,保证数据在数据库中的完整性和一致性。
2 ATP超速防护功能实现
2.1 ATP防护曲线的分析与计算
目前超速防护曲线的电算方法主要有3种:反算法、直接计算法和双向递推算法。但是无论哪种算法,其本质都是ATP超速防护模型标准,如图3所示,只是在计算方法上稍有差别。本仿真根据设计选择反算法进行计算,其主要思路是将制动过程看做加速过程,从限速点进行反推,直至所求限速入口点止,建立步骤如下。
1.根据列车运行的线路限速以及前行列车位置判断限速点位置s0,并获取该点目标速度ν0。
2.将列车制动的减速度看做列车牵引的加速度,选取时间步长Δt,按照如下公式计算并保存结果:


图2 ATP系统仿真中的概念数据模型 (CDM)

图3 ATP超速防护模型
其中:ad为列车惰行时的加速度,aq为列车最大牵引加速度,tz为制动建立时间,te为制动额外建立时间,tq为牵引切除时间,ta为设备反应时间,Vi为列车开始切除牵引时的速度,V'i为列车牵引切除且开始建立制动时的速度,Si为列车开始切除牵引时的位置。(νi,si)为列车制动距离速度曲线上,按照上式计算截取的离散点。
3.继续计算 νi,si。

4.如果Si满足目标限速入口点终止条件,则结束迭代运算,否则返回步骤2继续运行。
5.返回速度集合{V0, V1,V2…Vn}和对应距离集合{S0,S1,S2…Sn},以前者为纵坐标,后者为横坐标进行曲线拟合,得到ATP防护曲线。
列车追踪运行下的最小追踪间隔距离为:

其中Saction为司机确认信号以及制动反应走行距离,Sbrake为列车以最大速度制动的常用制动距离,Ssafe为安全距离,Strainlen为一个列车长度。
2.2 仿真步长的设计
超速防护曲线需按步长计算,不能恰好算到目标值处,所以设计时会给出一个允许误差ζ,当列车速度值满足ζ之内,则等同列车速度已满足目标值Vmax,即为迭代计算的终止条件。
变步长法中,步长取值通常为50~1000 ms间,开始步长取值较大,然后逐渐缩小。如图4所示,其中C为牵引合力,M为牵引质量。如果列车速度值在循环中跨过允许误差区间,就需要试凑函数缩小步长Δt,使得速度值可以被捕捉到。该方法的缺陷在于试凑需要将计算回滚。由于在软件仿真中系统开销时间可视为定值,所以计算回滚将不利于仿真帧稳定和时间同步。而定步长法中,往往将步长设计得非常小,如0.01 s,这样看似精确且不需要试凑,但是在列车运行的某些阶段,如以最大牵引力运行的牵引初始阶段,非常小的步长显然是没必要的;其次,如果此时允许误差值ζ取得不恰当,则列车是以接近允许误差的下限值在运行,实际上就是列车还没有达到最大值就开始准备制动了。所以需要选取合适的步长,既能满足必要的精确度,又能避免试凑。

图4 变步长法牵引计算流程图
根据以上分析,仿真步长Δt主要与允许误差ζ、加速度a、速度V有关系。ζ确定后,加速度与误差区间捕获概率有关,显然Δt不能超过速度与误差区间捕获时机有关,速度越大,越接近限速值或缓解值,Δt就应该越小。以X轴表示加速度,Y轴表示速度,Z轴表示步长,用MATLAB进行二维插值处理,如图5所示,可取得所有条件下的计算步长值,Δt只需要取到列车整个运行阶段的最小值即可。

图5 步长仿真图
表1为仿真中列车牵引、制动的最大加速度取值表,与国内城市轨道交通列车实际参数一致。取ζ为0.56 m/s(即2 km/h),则步长取其最小值为0.25 s。
2.3 系统实时性的设计
由于ATP系统的交互式需求,客户端需要频繁访问数据库,对实时响应能力有较高要求。如果仅依靠数据库的查找,等待时间过长,将难以满足仿真的实时性要求,并降低系统的可靠性。仿真采用多线程响应方式改进系统的实时性,使仿真性能得到改善。
如图6所示,利用后台线程开辟本地存储空间,有效利用空闲时间片,主要负责向数据库持续收集车载ATP计算所需的实时数据,避免多个计算线程同时访问数据库引起的大量无效搜索和访问共享资源引起的互斥操作 (比如轨道的占用、锁闭状态数据)。当ATP线程访问后台线程时,由于后台线程已经帮其剪除了暂时无用的数据,将大大提高仿真的实时性。此方法类似本地缓存。在仿真的初始阶段,ATP线程访问本地存储空间的命中率较低,但在短时间内,后台线程将按照LMA持续提前收集最近计算所需数据,这样随着命中率的提高,仿真计算将得到有效执行。并且,为了提高ATP线程的查找命中率,其优先级必须高于后台线程。

表1 加速度取值表
另外,为了满足测试需求,需要考虑数据库数据异动的情况,比如轨道突然落下异物引发列车紧急制动的情景,数据库保存的线路数据将会变化。此时让数据库触发数据更改消息发送给应用程序,ATP线程将根据更新数据重新计算防护曲线,控制列车运行,引发紧急制动。
3 仿真流程与结果
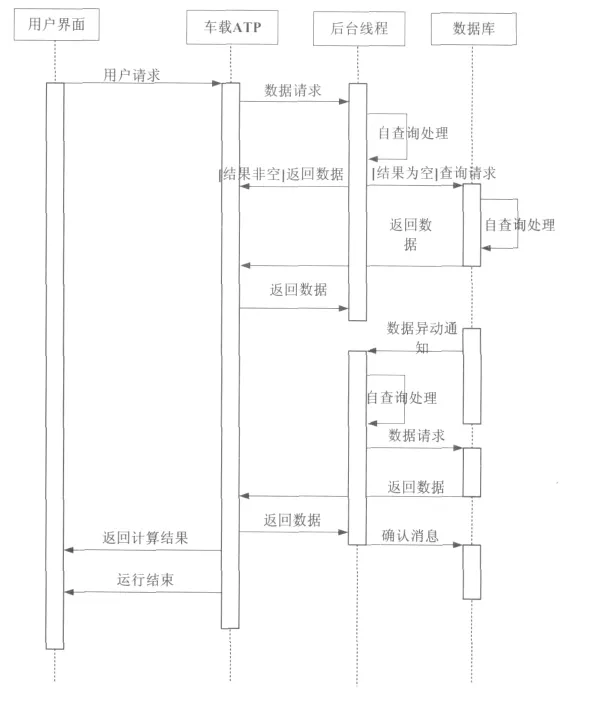
图6 ATP仿真多线程处理模型
仿真演示中设前行车与追行车为同型号,主要参数如下:列车长100 m,安全距离50 m,土建限速80 km/h,车站限速60 km/h,列车制动时建立时间2.0 s,额外时间1.5 s,响应时间0.8 s,牵引切除时间0.8 s,停站时长35 s。仿真流程如图7所示。

图7 仿真流程
仿真平台采用Visual C++和SQL server实现。为了仿真真实列车运行工况,列车在区间运行时采取加速、减速、加速、减速直至制动、停车的工况运行,如图8所示。列车最小追踪间隔为85.7 s,符合实际运行参数,达到了仿真的预期目标。

图8 列车运行仿真
4 结束语
ATP系统是保障列车安全高速运行的核心部件,同时它所决定的追踪间隔是CBTC系统重要的性能指标。本文主要从整体系统和局部功能两方面讨论了车载ATP系统仿真的设计与实现,并且通过设计计算步长和采用多线程响应方式,使仿真的实时性和准确度得到很大改善,对实际ATP嵌入式系统设计也具备一定参考价值。
[1] IEEE Vehicular Technology Society.IEEE STD1474.1 -2004 IEEE Standard for Communications-Based Train Control(CBTC)Performance and Functional Requirements[S] .New York:IEEE,2005.
[2] IEEE Vehicular Technology Society.IEEE STD1698TM-2009 IEEE Guide for the Calculation of Braking Distances for Rail Transit Vehicles[S] .New York:IEEE,2009.
[3] 姜江.PowerDesigner数据库系统分析设计与应用[M] .北京:电子工业出版社,2004.
[4] 郭彤城,慕春棣,刘韧,沈卓力.一种实用高速铁路ATP算法的设计与实现[J] .清华大学学报,2000,40(7):51 -54.
[5] 刘剑锋,丁勇,刘海东.城市轨道交通多列车运行模拟系统研究[J] .交通运输系统工程与信息,2005,5(l):79 -82.
[6] 荀径,宁滨,郜春海.列车追踪运行仿真系统的研究与实现[J] .北京交通大学学报,2007,31(2):34 -37.
[7] 陈荣武,诸昌铃,刘莉.CBTC系统列车追踪间隔计算及优化[J] .西南交通大学学报,2011,46(4):579 -585.
[8] 林颖,王长林.基于CBTC的车载ATP安全制动曲线计算模型的研究[J] .铁道学报,2011,33(8):69-72.
[9] 周峰.动车组牵引计算建模及软件仿真[D] .成都:西南交通大学,2005.
[10] 路飞.移动闭塞条件下地铁列车的运行优化[D] .济南:山东大学,2006.
[11] 潘玉林,姚新宇,黄柯棣.基于硬件的苛刻实时仿真系统研究[J] .系统仿真学报,2009,21(20):6455-6457.
[12] 李国柱,吕强,杨季文.交互式网络数据库应用程序的多线程解决方案[J] .计算机工程与科学,2004,26(4):73-76.
[13] 厉海燕,李新明.实时Linux中共享内存的实现[J] .计算机应用,2001,21(11):75 -76.
猜你喜欢
肇庆学院学报(2022年5期)2022-09-29
成都信息工程大学学报(2021年5期)2021-12-30
山西电子技术(2021年3期)2021-06-28
铁道通信信号(2020年1期)2020-09-21
中国惯性技术学报(2020年2期)2020-07-24
网络安全技术与应用(2020年1期)2020-01-07
通信技术(2019年9期)2019-10-09
铁道通信信号(2018年10期)2018-12-06
铁道通信信号(2016年8期)2016-06-01
北京航空航天大学学报(2016年12期)2016-02-27
