结构光视觉系统误差分析与参数优化
2013-07-25 02:29刘俸材李爱迪马泽忠
计算机工程与设计 2013年2期
刘俸材,李爱迪,马泽忠
(1.重庆市国土资源和土地房屋勘测规划院,重庆400020;2.国家遥感应用工程技术研究中心重庆研究中心,重庆400020)
0 引言
利用计算机视觉技术实现物体的三维扫描和场景恢复,在产品质量检测、机器人导航、逆向工程、物体识别以及文物保护和修复方面有着广阔的应用前景[1],典型的计算机视觉技术有基于双目立体视觉技术的被动视觉测量和基于结构光视觉的主动视觉测量[2],而双目立体视觉技术存在一个难以克服的问题,就是立体匹配,避免立体匹配的一种有效方法就是采用结构光视觉[3]。
目前,已经有很多学者对结构光视觉进行了深入的研究,取得了一定的成果[4-5]。然而极少有文献对结构光视觉测量系统进行精度分析,尤其是系统的讨论结构光视觉测量过程的各个结构参数对测量精度的影响的文献非常之少。文献[6]给出了一些优化结论,却没有对优化过程进行推导;文献[7]对视觉系统进行了误差分析,却没有得到明确的结论。因此,本文首先介绍结构光视觉测量原理,并建立基于结构光视觉的三维恢复模型,在此基础之上对结构光视觉系统的各个参数对测量精度的影响进行推导,最后通过实验对相应结论进行证明,对结构光视觉系统的误差分析及参数设计具有重要意义。
1 结构光视觉系统测量原理
结构光视觉测量原理如图1所示。图1中,Oc为摄像机的光心,XcYcZcOc为摄像机坐标系;Op为投影仪的光心,XpYpZpOp为投影仪坐标系。
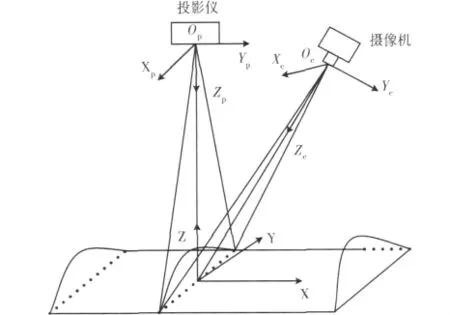
图1 结构光视觉模型
由于投影仪投影的光平面在投影仪坐标系中的坐标可以通过投影仪的各项参数计算出来,并且投影在被测物体上的光条可以通过摄像机标定确定其在摄像机坐标系中应满足的关系,如果知道摄像机坐标系与投影仪坐标系之间的相对位置关系,则可以求解出被测物体上的光条在摄像机坐标系或者投影仪坐标系中的具体坐标。
1.1 求取特征点在摄像机坐标系中的坐标
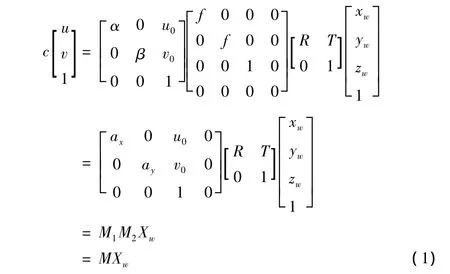
根据张正友灵活标定算法[8]可知,世界坐标系中的任意点Xw=(xw,yw,zw)与其在图像坐标系中的对应点(u,v)存在如下关系
1.2 求取特征点在投影仪坐标系中的坐标
为计算特征点在投影仪坐标系中的坐标,本文利用标定板中的4个角点作为特征点,如图2所示。本文分两步求取特征点在投影仪坐标系中的坐标,即先求取特征点在投影仪坐标系中的XY坐标,然后求取Z坐标。
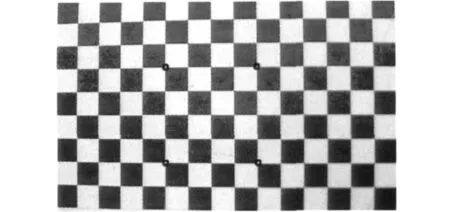
图2 标定版上的特征点
1.2.1 特征点在投影仪坐标系中的XY坐标
首先,固定好标定板并调节投影仪的位置,使投影仪的光轴垂直于标定板平面并通过由四个特征点构成的长方形的中心。为实现这个目标,我们可以通过投影一个十字光栅来检测投影仪的光轴是否通过特征点构成的长方形的中心;调节投影仪的位置并检测投影图像是否为完美的长方形来检验投影仪的光轴是否垂直于标定板平面。如果投影仪投影的图像为梯形,则投影仪的光轴与标定板平面不垂直,可以通过调节投影仪摆放姿态实现投影完美的长方形图像,从而确保投影仪的光轴垂直于标定板平面。
不失一般性,我们将标定板上特征点组成的长方形的中心作为世界坐标系的原点,X轴水平向右,Y轴竖直向下,Z轴指向标定板里面。投影仪坐标系以投影仪光心为原点,三个轴的方向与世界坐标系相同。由于投影仪的光轴垂直于模板平面且穿过世界坐标系的原点,因此投影仪坐标系的XY平面与世界坐标系的XY平面平行,空间点在两个坐标系中的坐标只有Z轴方向存在差异。因此,四个特征点在世界坐标系和投影仪坐标系中具有相同的X、Y坐标,图中标定板每格的大小为30×30mm,因此四个角点在世界坐标系中的坐标分别为 (-60,-60,0)、(60,-60,0)、(-60,60,0)、 (60,60,0),在投影仪中的坐标为(-60,-60,z)、(60,-60,z)、 (-60,60,z)、 (60,60,z)。这里的z本质上就是世界坐标系和投影仪坐标系在z轴上的距离。
1.2.2 特征点在投影仪坐标系中的Z坐标
首先,将投影仪调整到一个合适的位置,要求投影仪的光轴垂直于模板平面且通过四个特征点构成的长方形的中心,记录下投影图像在模板平面上的宽度L1。然后将投影仪向后移动一段距离L,并使得移动后的投影仪仍然满足光轴垂直于模板平面且通过四个特征点构成的长方形的中心,记录下投影仪投影图像的宽度L2,两次投影十字光栅校正投影仪的位置的图像如图3所示。
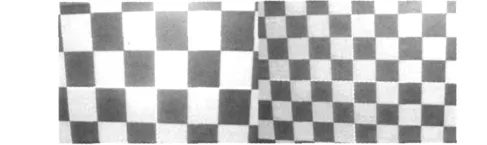
图3 改变位置前后两次投影“十”字光栅
求取特征点在投影仪坐标系中的z坐标的原理如图4所示。为方便计算,我们将图4简化如5所示。
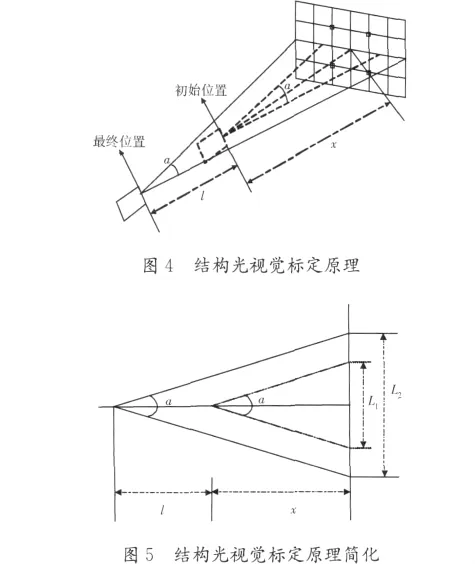
由于L、L1、L2均为已知,因此我们很容易得到

则

在本文实验中,L=244,L1=270mm,L2=390mm,则z=793mm,故标定模板上的四个角点在投影仪坐标系中的坐标分别为:(-60,-60,793)、 (60,-60,793)、 (-60,60,793)、(60,60,793)。
计算出空间点在投影仪坐标系摄像机坐标系中的坐标后,便可以计算出投影仪坐标系和摄像机坐标系之间的相对位置关系。由于投影仪坐标系和摄像机坐标系均为笛卡尔坐标系,故可以通过式 (4)表示
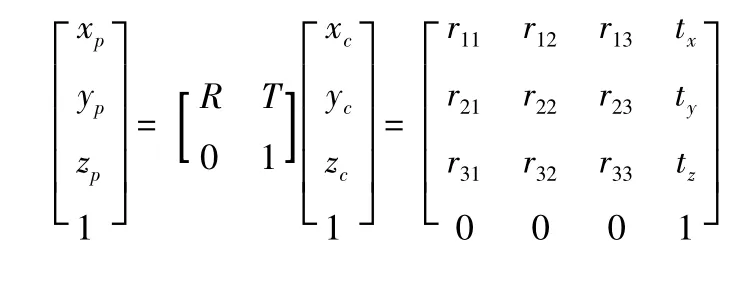
通过前面的计算,Xw在摄像机坐标系和在投影仪坐标系中的坐标均为已知,分别将四个特征点的对应坐标带入式 (4),可以计算出平移向量T和旋转矩阵R,结果如下
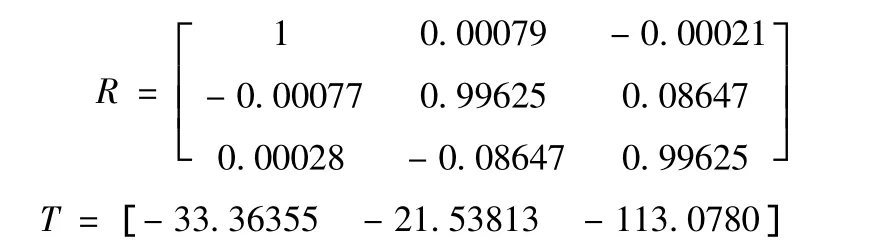
由于投影仪投影的光栅条纹在投影仪坐标系中的X、Y坐标是已知的,且投影仪坐标系和摄像机坐标之间的相对位置关系也为已知,利用式 (4)便可计算出光栅条纹上的点在投影仪坐标系中的具体坐标,从而实现结构光视觉的三维恢复。
2 特征提取误差对测量精度的影响
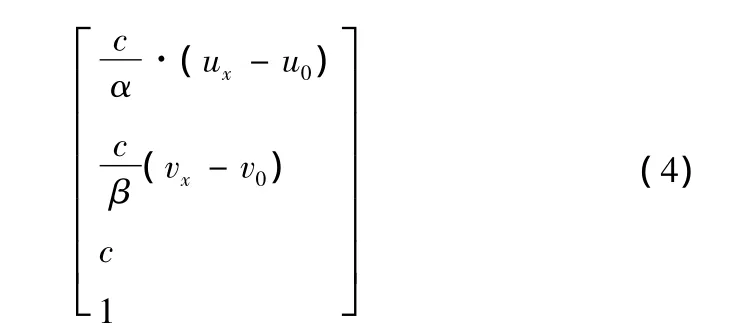
由于CCD的每一个像素都具有一定的面积,一个无大小的理想点在CCD像素上的精确位置无法在图像上得到反映[10]。这就在根本上造成了像点坐标误差,即图像识别误差。通常,我们认为单个像素点的最大特征提取误差为0.5δ(δ表示像元尺寸大小),为计算特征提取误差对测量精度的影响,只需要将xp、yp、zp分别对ux、vx求导即可。由式 (4)可得
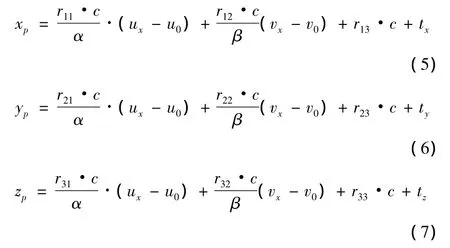
先将 xp、yp、zp分别对 ux、vx求偏导可得

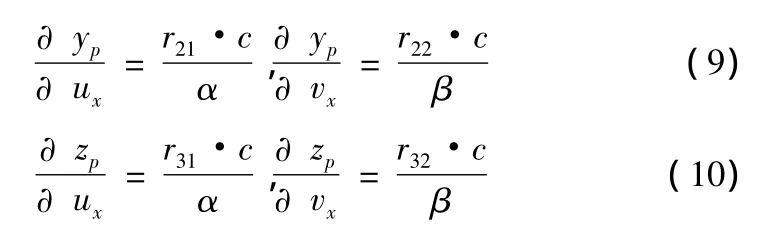
现假设Δx、Δy、Δz为测量精度误差,Δu、Δv为特征提取误差,根据上述公式可得
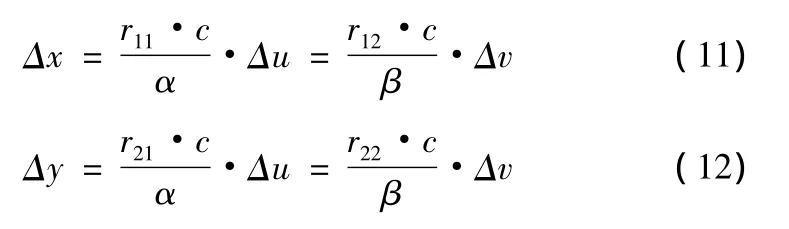

上面所有公式中,c也是摄像机标定过程中的参数,均可以在摄像机标定阶段求解。因此,由式 (11)、 (12)、(13)可知,测量误差Δx、Δy、Δz与特征提取误差Δu、Δv成正比,故特征提取误差越大,测量精度将直线下降,因此我们必须尽量减小特征提取误差。本文通过提取亚像素角点[11]将最大特征提取误差减小至0.16像素,将得到的测量误差与原始测量误差相对比,得到结果如表1所示。
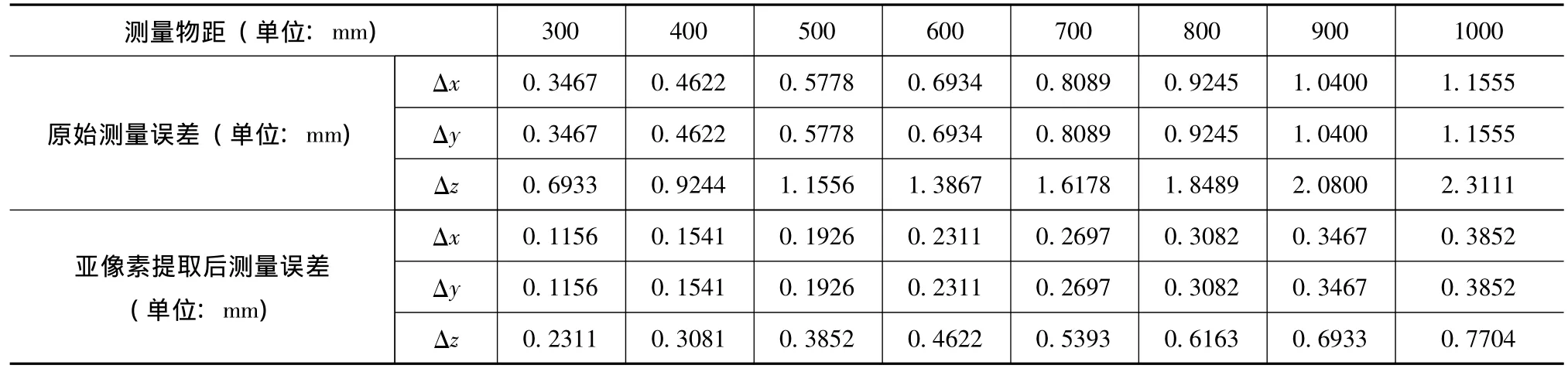
表1 提取亚像素角点前后的测量精度对比
3 结构参数对测量精度的影响
为弄清摄像机光轴与投影仪光轴之间的夹角对测量精度的影响,画出结构光视觉测量的误差模型如图6所示,在图6中,摄像机主轴与投影仪主轴之间的夹角为α。空间点P在图像上的理想横坐标是ux,由于图像特征提取存在误差,空间点P在图像上的实际横坐标为ux+δ。其中,δ为最大特征提取误差。pp″平行于摄像机主轴,p″p'平行于X轴并与摄像机主轴垂直。
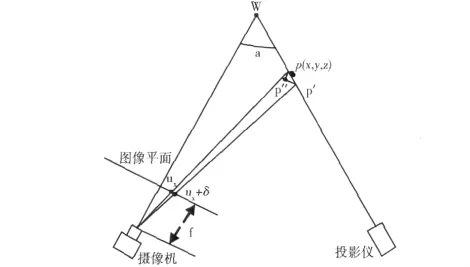
图6 特征提取误差对测量精度的影响
由图6可知,由特征提取误差导致Z轴的测量误差可用pp″表示,X轴方向的测量误差可用表示为由图6可知,X轴方向的测量误差与Z坐标值和特征提取误差δ的大小成正比,与摄像机焦距成反比

由图2可知,Z轴方向的测量误差与X轴方向的测量误差成正比,则

由式 (14)、式 (15)可知,摄像机主轴与投影仪主轴之间的夹角对X轴方向的测量精度没有影响,但是对Z轴方向的测量精度有影响,当两主轴之间的夹角α小于45°时,Z轴方向的测量误差随着夹角α的减小而急剧增大。当两主轴之间的夹角α大于45°时,Z轴方向的测量误差随着夹角α的增大而缓慢减小。但是如果夹角α太大,则标定精度又大幅下降,因此夹角不能太小而又不宜太大,通常选取45°左右。
4 测量物距对测量精度的影响
在结构光视觉测量系统中,物距可以用被测物体在摄像机坐标系中的Z坐标值来表示。因此,由式 (13)可知,随着物距的增大,X轴方向的测量误差随之增大。由式(15)可知,Z轴方向的测量误差也随着物距的增大而线性增大。由于Y轴与X轴计算公式相同,故可知Y轴方向的测量精度也随之物距的增大而线性增大。为检验上述理论,本文选取物距300mm到1000mm之间的多个数值进行实验,得到实验结果如图7所示。
图7中,由于X轴与Y轴的计算原理及像元尺寸、Z坐标值等影响因素完全相同,故两个方向的测量误差完全相同,在图7上X轴误差线和Y轴误差线的两条线完全重叠。
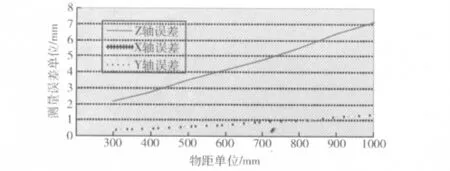
图7 测量误差与物距的关系
5 摄像机焦距对测量精度的影响
由式 (11)、 (12)可以看出,随着摄像机焦距的增大,结构光视觉系统的测量误差将非线性变小。为检验上述结论,本文实验利用可变焦的维视MV1303-UM摄像机,摄像机光轴与投影仪光轴夹角为30°,分别测量其焦距为4.5mm和10.0mm时,在物距为300-1000mm之间的测量误差,误差结果如表2所示。
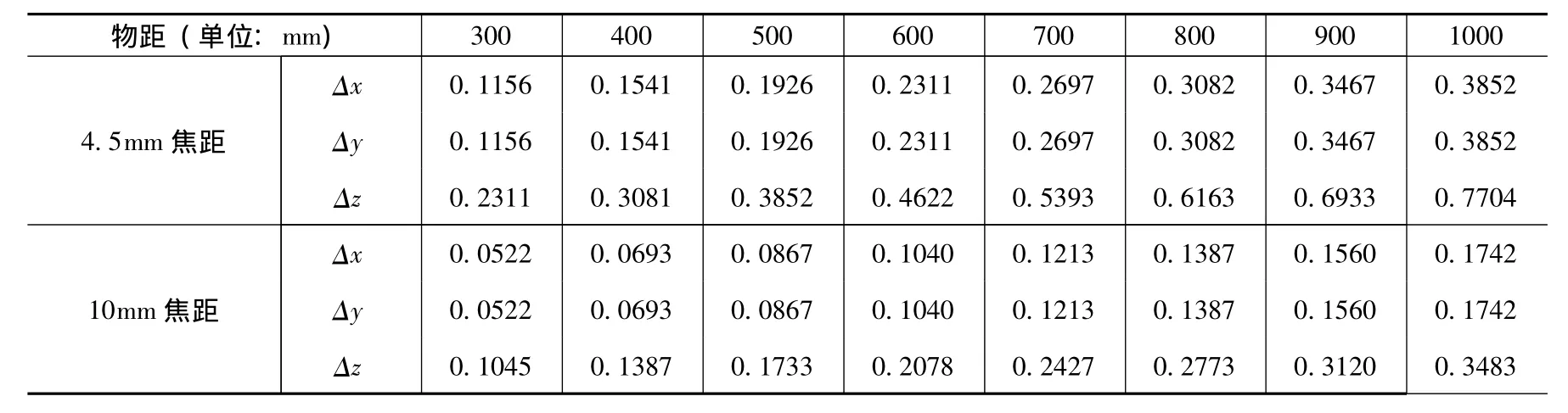
表2 摄像机焦距对测量精度的影响
6 结束语
分析了结构光视觉系统测量原理模型,深入讨论了各项参数对测量精度的影响,结论如下:测量误差与特征提取误差成正比,特征提取误差越大,测量误差越大,反之亦然;摄像机光轴与投影仪光轴之间的夹角对Z轴存在明显影响,当夹角小于45°时,Z轴误差随着夹角的减小而急剧增大;当夹角大于45°时,随着夹角的增大而缓慢减小;而对X轴和Y轴测量误差没有明显影响。测量物距对测量误差的影响是线性的,测量物距越大,测量误差随之增大;摄像机焦距与测量误差成反比,摄像机焦距越大,测量误差越小,精度越高。
[1]Thomas P K,LUC V G.Real-time range acquisition by adaptive structured light[J].IEEE,2006,28(3):432-445.
[2]TIAN Qingguo,GE Baozhen,DU Pu.Measuring of human figure size based on laser 3D scanning[J].Optics And Precision Engineering,2007,15(1):84-88(in Chinese).[田庆国,葛宝臻,杜朴.基于激光三维扫描的人体特征尺寸测量[J].光学精密工程,2007,15(1):84-88.]
[3]ZHOU F,ZHANG G,JIANG J.Construction feature points for calibration a structure light vision sensor by viewing a plane from unknown orientations [J].Optics and lasers in Engineering,2005,43(10):1056-1070.
[4]DING Jianjun,JIANGzhuangde,LIBing,et al.Error analysis and compensation of linear structured light scanning probes[J].Journal of Xi'an Jiaotong University,2008,42(3):286-290(in Chinese).[丁建军,蒋庄德,李兵,等.线结构光扫描测头误差分析与补偿方法 [J].西安交通大学学报,2008,42(3):286-290.]
[5]XU Li,ZHANG Zhijiang.Error propagation analysis of structured light system [J].Optics and Precision Engineering,2009,17(2):306-313(in Chinese).[许丽,张之江.结构光测量系统的误差传递分析[J].光学精密工程,2009,17(2):306-313.]
[6]ZOU Yuanyuan,ZHAOMingyang,ZHANGLeiet al.Error analysis and structural analysis of structured-light visual sensor for seam tracking [J].Chinese Journal of Scientific Instruments,2008,29(12):2605-2610(in Chinese).[邹媛媛,赵明扬,张雷,等.结构光视觉传感器误差分析与结构分析[J].仪器仪表学报,2008,29(12):2605-2610.]
[7]XUE Ting.Study on the key technologies of instrumentation of 3D visual inspection[D].Tianjin:Tianjin University,2006(in Chinese).[薛婷.三维视觉监测仪器化关键技术研究[D].天津:天津大学,2006.]
[8]HEATH M T.Scientific computing:An introductory survey[M].Beijing:Tsinghua University Press,2005.
[9]LIU Fengcai,XIE Minghong,WANG Wei.Stereo calibration method of binocular vision [J].Computer Engineering & Design,2011,32(4):1508-1512(in Chinese).[刘俸材,谢明红,王伟.双目视觉的立体标定算法 [J].计算机工程与设计,2011,32(4):1508-1512.]
[10]ZHANG Weiguang,ZHAO Hong.Error correction method for three-dimensional measurement system with multi-sensor and linear-structure light[J].Journal of Xi'an Jiaotong University,2011,45(6):75-80(in Chinese).[张维光,赵宏.线结构光多传感器三维测量系统误差校正方法[J].西安交通大学学报,2011,45(6):75-80.]
[11]HOU Jianhui,LIN Yi.Adaptive harris X-corner detection algorithm [J].Computer Engineering& Design,2009,30(20):4741-4743(in Chinese).[侯建辉,林意.自适应的Harris棋盘格角点检测算法 [J].计算机工程与设计,2009,30(20):4741-4743.]
猜你喜欢
红领巾·萌芽(2022年3期)2022-03-13
中学生数理化·八年级物理人教版(2021年12期)2021-12-31
故事作文·高年级(2021年11期)2021-11-28
摄影之友(2020年12期)2020-12-23
发明与创新·中学生(2020年12期)2020-01-11
电脑爱好者(2018年17期)2018-11-05
中国计算机报(2017年36期)2017-10-17
课程教育研究·新教师教学(2015年5期)2017-09-27
探测与控制学报(2015年4期)2015-12-15
雷达学报(2014年4期)2014-04-23