
类哺乳动物腿式机器人研究综述
2013-07-25 04:02秦现生张雪峰谭小群冯华山张培培
中国机械工程 2013年6期
秦现生 张雪峰 谭小群 冯华山 张培培
1.西北工业大学,西安,710072
2.陕西省数字化特种制造装备工程技术研究中心,西安,710072
0 引言
从1962年世界上第一台工业机器人——斯坦福(STANFORD)操作手诞生以来,机器人技术得到了迅猛发展,先进机器人的研究和开发已成为衡量一个国家或地区经济和科技实力的重要标志之一[1]。仿生机器人作为机器人发展的高级形式,将自然界中各种生物系统的生物结构、运动方式和生物控制方式引入到机器人技术领域,通过模仿生物的外形特征、运动机理或生理机能,实现了种类众多的精巧设计和特殊任务装备设计。
仿生机器人的移动方式主要有腿式、游动式、扑翼飞行式和蠕动式等。面向陆地应用领域,传统的轮式移动方式具有速度高、运行稳定性好和控制方便等优点,但它要求运行的地面相对平坦且连续,对复杂超高障碍物、超距沟渠、陡峭山地、泥泞沼泽和沙漠等非平坦环境的适应能力较差。相比传统的轮式移动机器人,类哺乳动物腿式机器人虽然移动速度较低,但却可以利用离散的地面支撑实现非接触式障碍规避、障碍跨越、上下台阶以及不平整地面运动,对复杂地形和不可预知环境变化具有极强的适应性,且随着腿式机器人自主环境识别能力、驱动能力和负载能力的增强,腿式机器人将在复杂危险极限环境且对运行速度有较高要求的运输领域表现出更强的应用潜力,如帮助战地环境下的士兵提高作业执行机动性和效率等。可以预计,在未来的矿产采掘、星际探测、抢险救灾和军事侦查与反恐等国民经济和国防建设等各个领域类哺乳动物腿式机器人将表现出越来越强的优势。
本文从类哺乳动物双腿式机器人和四腿式机器人两个方面介绍了国内外腿式仿生机器人的研究现状,分析和讨论了腿式仿生机器人的相关理论方法及存在的问题,并对未来的发展趋势进行了预测。
1 双腿式仿生机器人
双腿式仿生机器人主要以生物人为仿生原型,根据生成的步态有无关节驱动,双腿式仿生机器人可分为主动行走和被动行走两种,而被动行走则主要是从降低步行能耗的角度进行考虑的。
1.1 双腿式主动机器人
在双腿式机器人样机研制上,比较有代表性的有瑞士苏黎士大学的Ecci、美国弗尼吉亚大学的CHARLI、美国波士顿动力公司的Petman和瑞典梅拉达伦大学的Dasher以及日本本田的ASIMO等。区别于传统的“电机+减速”直接驱动,这些机器人较为新颖的特点为肌肉肌群驱动,且部分机器人选用能量密度大的液压驱动。其中,Ecci为世界首款拥有“肌肉”和“肌腱”的机器,如图1所示[2]。CHARLI机器人,如图2所示,全身有20个自由度,基于人体解剖学,采用模拟肌肉驱动的线性驱动器实现步行和打手势[3]。
自2009年,美国波士顿动力公司为美国军方研制了液压驱动双腿式机器人Petman[4],用于化学服测试。该机器人的预期功能为能够自动维持平衡和自由运动、实现行走和匍匐等一系列动作,且可模拟人体温度湿度等真实生理功能。视频资料显示,机器人在跑步机上的移动速度可达1.967m/s,且可在外界冲击下保持运动平衡,具有较强的运动性能,如图3所示。
瑞典梅拉达伦大学开发的液压驱动双腿跑步机器人Dasher,机器人腿有2个液压缸,采用MOOG比例伺服阀控制,系统工作压力为10MPa,机器人足采用跷结构来实现地面冲击缓冲,如图4所示[5]。
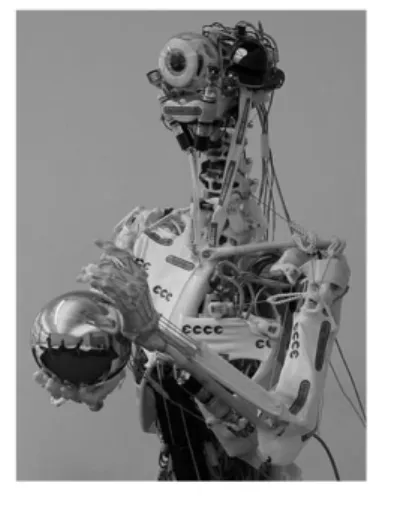
图1 Ecci

图2 CHARLI
日本本田公司的ASIMO是世界著名的双腿式机器人[6]之一。ASIMO高1300mm,质量为54kg,有34个自由度,采用智能化行走控制技术,可在复杂的环境下迅速并平稳地移动、快速步行、奔跑和迂回行走。另外,韩国[7]、法国[8]等许多国家都开展了双腿式机器人研究。
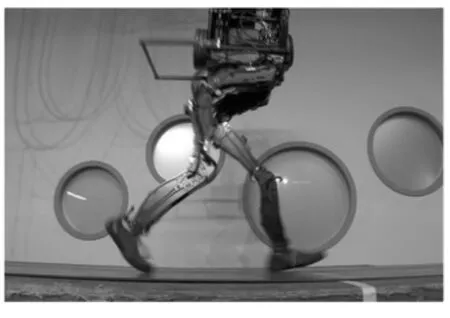
图3 Petman
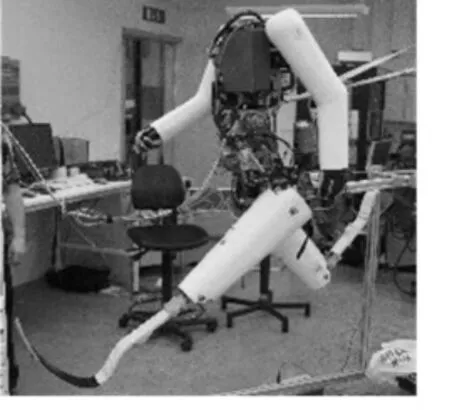
图4 Dasher
国内哈尔滨工业大学[9]和国防科技大学[10]从20世纪80年代中期开始研究双腿式机器人。北京理工大学研制了BRH系列机器人,并于2005年研制了BRH-02,机器人能根据自身的平衡状态和地面高度变化调整姿态,实现未知路面上的稳定行走[11]。清华大学研制了THBIP系列机器人[12],其2008年研制的 THBIP-Ⅱ,采用模块化关节和同步带加谐波减速器的传动结构和分布式控制系统,可实现步长为15cm、步速为0.075m/s的平地行走和稳定的踢球动作;哈尔滨工程大学研制了双腿式机器人 HEUBR 1[13]。
1.2 双腿式被动机器人
对被动行走系统的研究始于20世纪90年代。康奈尔大学研制的三维被动双腿式机器人[14]如图5所示。机器人依靠与异侧下肢固联的上肢来维持平衡,可稳定地行走于下坡斜面。2011年美国康奈尔大学研制的半被动机器人Ranger在日本大阪机器人马拉松比赛中成功创下无障碍行走65.18km的记录,机器人质量为5kg,单腿长度为1000mm,有3个自由度(髋关节1个,踝关节2个),如图6所示[15]。
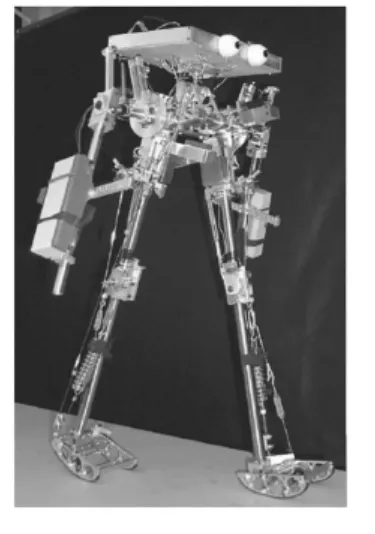
图5 康奈尔被动

图6 Ranger
麻省理工学院研制的被动双腿式机器人[16],其特点为踝关节含2个伺服电机驱动自由度,每个髋关节各含1个自由度,为被动关节,无膝关节,在行走过程中依靠左右摇摆避免摆动腿提前触地,可实现0.03rad坡度上的稳定步行,利用随机策略梯度强化学习算法能够迅速适应地形和坡度变化。
荷兰代尔夫特大学研制了 Mike、Max、Denise和 Meta系列样机[17-19]。Mike和 Max较为显著地特点是采用McKibben气动人工肌肉,分别用于研究髋关节的主动摆腿动作和上体对步行稳定的影响。Denise质量为8kg,高1500mm,有5个自由度,其中膝关节和踝关节为不受控自由度,髋关节由McKibben气动人工肌肉驱动,踝关节采用滑板原理被动设计,把样机的侧倾与转向耦合起来,不需要对踝关节运动进行控制即可实现稳定的三维步行,稳定步行速度可达0.4m/s。
国内,吉林大学对双腿式机器人的被动动力学进行了研究,分析了行走步态规律及稳定性[20]。清华大学等对欠驱动步行机器人的被动动力学方法、半被动双足机器人的控制算法等进行了研究[21]。
2 四腿式仿生机器人
四腿式仿生机器人的主要仿生原型为猫、山羊、狗和马等小型和大型哺乳动物,其中,具有高速、高机动性特点的四腿式机器人是近几年显著的研究成果。
2.1 国外研究现状
早期比较知名的有20世纪60年代美国南加州大学研制的世界第一款计算机控制四腿式机器人Phony Pony,如图7所示,以及1968年美国通用电气公司研制的四腿步行车Walking Truck[22]。
2.1.1 德国和意大利
德国和意大利等欧洲国家开发的四腿式机器人多以电机驱动形式为主,欧洲的瑞典皇家工学院、德国卡尔斯鲁厄大学和不莱梅大学分别研制了关节型电机驱动四腿式机器人 WARP1[23]、BISAM[24]和空间探测机器人 ARAMIES[25],而意大利理工学院开发的Hyq则为具有代表性的液压驱动四腿式机器人[26],如图8所示,外形尺寸为1000mm×500mm×980mm,质量为91kg,有12个自由度(8个为液压,4个为电动),每个关节的角度活动范围为120°,设计有欠驱动踝关节和足,可实现平坦路面静态步行、关节轨迹跟踪性能测试和单腿竖直平面跳跃。
2.1.2 加拿大和美国
加拿大和美国开发的四腿式机器人较为显著地特点是运行速度高,在机器人奔跑方面取得了较为丰富的研究成果。
图7 Phony Pony
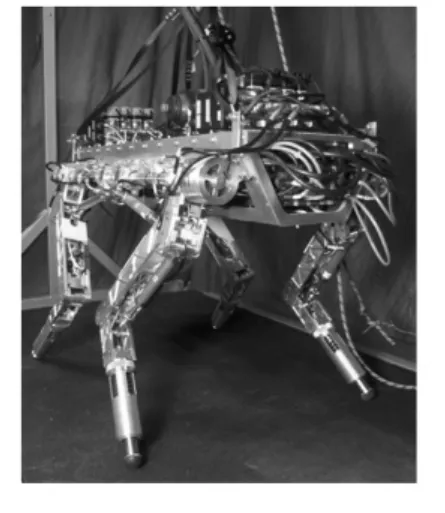
图8 HyQ
1996~2006 年,加拿大麦吉尔大学的科研人员研制了SCOUT系列和PAW四腿式机器人[27],其特点为可实现奔跑运动,机器人结构简单、自由度少,控制方便。SCOUTⅡ在腿设计上增加弹性元件,可实现步行和1.2m/s弹跳步态下的奔跑和奔跑转向。SCOUTⅡ-K增加了欠驱动自锁膝关节,可实现稳定小跑步态,如图9所示。PAW在SCOUTⅡ的基础上对足进行改进,增加主动驱动轮,可实现轮腿或轮腿复合滚动、奔跑和跳跃等步态,如图10所示。
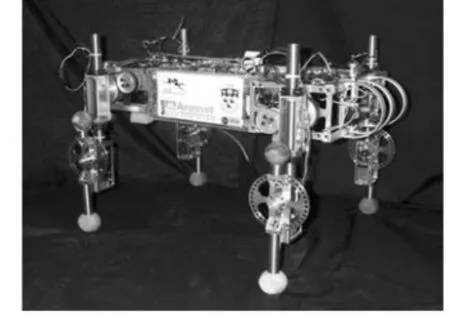
图9 SCOUTⅡ-K

图10 PAW
1984 至今,美国学者Raibert及其团队研制了动态四腿式机器人、Bigdog和LittleDog等四腿式机器人[28-30],其中 Bigdog实现了高动态高速、高机动性和高负载运动,为当今最先进的四腿式机器人,如图11所示。1984~1987年,Raibert在卡内基梅隆大学研制了动态四腿式机器人,外形尺寸为1050mm×350mm×950mm,机体质量为25.2kg,由液压驱动,利用单腿算法、有限状态机和虚拟腿等控制方法,实现小跑、跳跃和步态转换,小跑步态速度可达1.0m/s。2004年和2008年,Raibert领导的美国波士顿动力公司研制了两代四腿式机器人BigDog。最新的BigDog尺寸为1100mm×300mm×1000mm,质量为109kg;机载系统可提供动力、感知、驱动、控制和通信等功能,动力源采用水冷两冲程内燃机,采用发动机—液压泵—液压缸的驱动链,由人通过无线控制以对角步态行走,机器人集成了双目立体视觉系统用于获取三维地形信息,并利用激光雷达进行无连续操作跟踪引导;机器人基于运动和足底地面反力进行控制,通过地形感知和姿态控制来控制身体高度、方向或落脚位置以适应地形变化;能完成机器人起立、蹲下、以0.2m/s的速度爬行,1.6m/s的速度小跑,2m/s的速度奔跑,跳跑最高速度可达3.1m/s,负重可达154kg,续驶时程达2.5h、1010km,可爬越35°的松软卵石表面斜坡和以爬行步态翻越模拟瓦砾堆,实现冰雪泥泞沙石的复杂路面稳定行走;此外,美国波士顿动力公司于2010年研制了用于研究动态控制、复杂地形感知和运动行为关联的通用四腿式机器人LittleDog。
美国斯坦福大学开发了用于测试的7m/s疾驰的四腿式机器人KOLT[31],如图12所示,以大山羊为仿生对象,每条腿有3个电磁驱动主动自由度,单腿最高速度可达4.5m/s,可在跑步机上实现1.1m/s小跑。

图11 BigDog
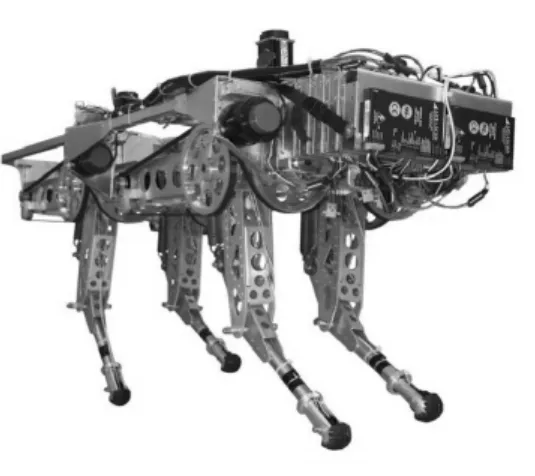
图12 KLOT
2.1.3 日本和韩国
日本和韩国四腿式机器人的特点为可实现动态运动,且在机构柔性设计、类肌群驱动和新型驱动器方面具有特色。
从1976年起,日本东京工业大学的科研人员先后研制了四腿式机器人KUMO-Ⅰ(1976)、PV-Ⅱ(1978~1979)和TITAN系列四腿式机器人[32](1981~2004)。其中,TITAN-Ⅺ可用于大型工程施工中,在混凝土斜坡上运行和控制钻锚。
1999 年,日本东京大学研制了柔性脊柱和肌腱驱动四腿式机器人SQ43,如图13所示,利用柔性脊柱可实现减震和通过狭窄空间[33]。
2011 年,日本东京大学开发了四腿骨骼肌肉机器人PIGORASS,如图14所示,重量为4.0kg,总长为350mm,采用ABS树脂和碳纤维增强复合材料等制成,机器人前腿为2段式、后腿为3段式,共有10个自由度,由McKibben气动人工肌肉驱动,可在0.2s内跳跃0.03m 高和以0.48m/s的速度疾驰[34]。
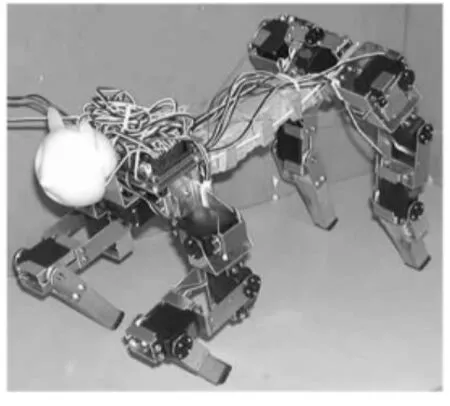
图13 SQ43
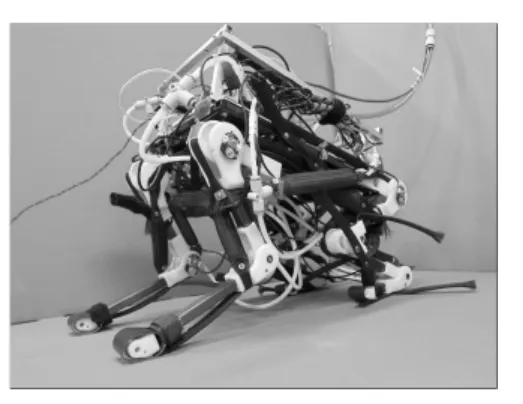
图14 PIGORASSt
2004~2007 年,Hiroshi Kimura在日本电气通信大学开发了地形自适应机器人TekkenⅠ-Ⅳ。TekkenⅢ为自携动力自主导航机器人,质量为10kg,采用60W直流电机驱动俯仰髋关节和膝关节,小功率直流电机驱动踝关节,基于DIMM-PC的CCD摄像机和激光测距仪进行导航,步行速度达0.7m/s。2010年,Hiroshi Kimura又开发了图15所示的三段式腿结构自适应动态机器人 Kotetsu[35]。
2003~2009 年,东京理科大学研制了奔跑机器人Rush,其可实现站立到跳跃步态转换和多种路面奔跑,其可以0.9m/s的速度跳跃奔跑,且可跑上20mm高的平台[36],在结构上与加拿大的SCOUT机器人较为相近。
2007 年至今,韩国成均馆大学研制了AiDIN系列机器人,图16所示为AiDIN3机器人。AiDIN1机器人腿有3个主动自由度,其特点是选用弹性环节和膝关节离合器等分别实现冲击缓冲和主动欠驱动切换,可实现滚动平板上自身姿态调整和0.2m/s小跑步态[37-38],主动欠驱动切换为其显著特点。

图15 Kotetsu
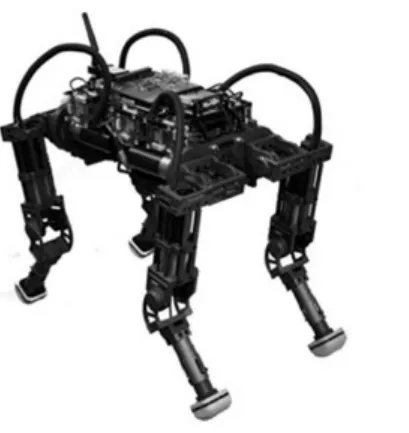
图16 AiDIN3
2005和2007 年,韩国庆北大学研制了含有腰关节的ELIRO系列机器人和SMA驱动机器人,图17所示为SMA驱动四腿式机器人。ELIRO-Ⅱ采用齿轮直流电机和舵机驱动、CMOS视觉采集,可实现目标寻找和捕捉[39-41],其显著特点为腰关节设计。
2008 年,韩国工业技术研究院开发了液压驱动四腿机器人qRT-1及其试验平台qRT-2,其中qRT-2为两轮两腿前驱装置,外形尺寸为1000mm×500mm×1000mm,重量为60kg,每条腿有3个主动自由度,可实现1.3m/s结构化路面对角步态、20°斜坡和0.7m/s非结构化路面行走,有效载荷为40kg,如图18所示[42]。
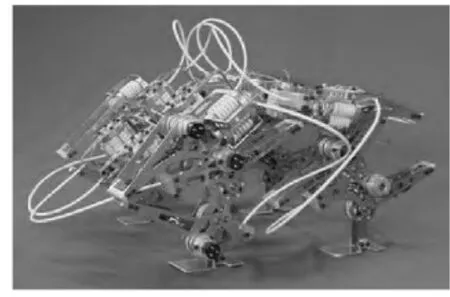
图17 SMA驱动机器人
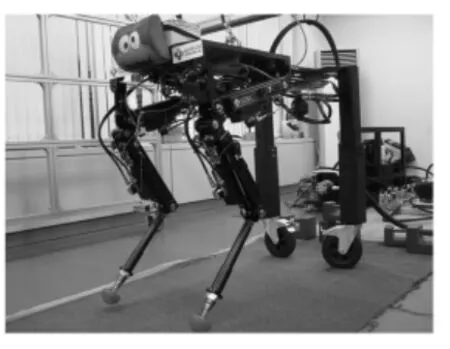
图18 qRT-2
2.2 国内研究现状
国内四腿式机器人和多腿式机器人的研究始于20世纪80年代末,而液压驱动机器人则是近几年较为重要的研究成果。早期的多腿式机器人为1988年中科院沈阳自动化所开发的“海蟹号”六腿机器人,如图19所示[43]。
2003 年,清华大学研制了Biosbot机器人[44],其特点是采用CPG控制策略;速度可达到0.13~0.24m/s,可实现慢走、对角小跑两种步态和步态相互转换,可完成10°上下坡,跨越20mm高度障碍,具有膝肘组合多种运动模式。
2007 年,中科院合肥智能机械研究所研制了TIM-1机器人。该机器人有12个主动自由度,其中髋关节和膝关节各1个自由度,踝关节为欠驱动自由度,由弹簧构成缓冲系统以适应地形;安装有控制姿态的倾斜计和足底开关等;通过CPG+FNN产生周期步态和进行关节运动控制[45]。
2008 年,西北工业大学研制了两款四腿式机器人[46-47],图20所示为第二款。第一款机器人采用框架式机体结构,其显著特点是设计有实现稳定行走的重心调整装置。第二款机器人可在2m×1m且坡度为10°的实验坡上上下坡稳定行走。

图19 TIM-1
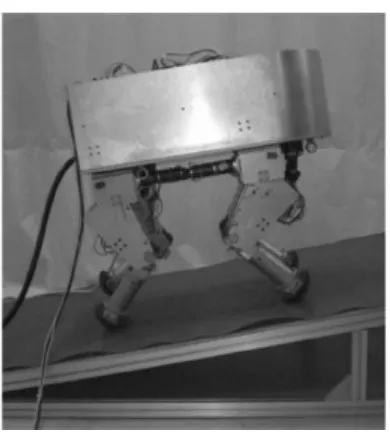
图20 西北工业大学研制的机器人
2010 年,山东大学研制了国内第一台液压驱动四腿式机器人,视频显示可实现快速小跑和载人步行,如图21所示[48]。
南京航空航天大学研制的液压驱动四腿式机器人,如图22所示,其特点为液压驱动的四腿机器人关节采用了基于平行四边形的伸缩四连杆关节传动机构[49]。

图21 山东大学研制的机器人
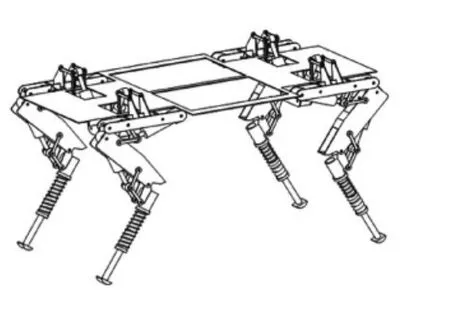
图22 南京航空航天大学研制的机器人
3 主要研究问题和方法
3.1 机器人腿结构
腿式机器人腿部结构直接决定了机器人的运动学和动力学特征,根据腿部机构中组成运动链的各构件是否构成首尾相连的封闭系统,可分为开链式和闭链式。类哺乳动物生物腿的多段式腿结构、复合弹性腿及相配合的柔性机体和机体自由度等是重要的研究成果,且并联式腿机构凭借其优越的结构性能,成为研究热点。
开链式多为关节型式,其特点是自由度较多,末端运动轨迹多样,有横摆和纵摆两种运动形式,其中横摆运动形式多见于大型四腿工程机器人,如日本东京工业大学的TITAN系列机器人,而纵摆运动类型则多见于快速运动的小型腿式机器人,而在四腿式机器人领域,更加符合仿生学的三段式腿结构是新出现的结构形式,如美国波士顿动力公司的BigDog、日本东京工业大学的Kotetsu和日本东京大学的PIGORASS等,这种结构的特点是可实现多种膝肘组合运动,其不足为随着自由度的增加会出现冗余控制等问题。
闭链式机构常见于早期研制的样机,多以四连杆及其衍生形式和框架式等形式出现,日本东京工业大学的TITAN系列机器人即是采用四连杆形式的机器人腿机构,其特点是可运动解耦,末端可产生近似直线运动,不足是易出现死点。框架式利用多层框架式机架之间的相对转动或移动来实现机器人的前进或原地转动,具有间歇运动的特点,图23所示为美国卡内基梅隆大学研制的具备该特点的框架式行星探测机器人Daedulus[50]。
并联式腿机构是一类特殊的闭链式机构,可含有一个或多个封闭运动链,区别于前述机构的串联驱动,具有并联驱动的特点,且具有较高的结构强度、稳定性和载重/自重比等,适合于高负载低速运动领域。图24所示为日本早稻田大学研制的并联式腿机器人 WL-16RIV[51]。
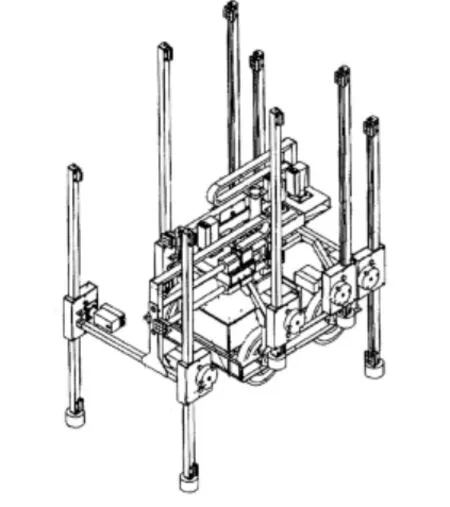
图23 Daedulus

图24 WL-16RIV
对类哺乳动物仿生机器人而言,腿部结构的设计,尤其是高速高机动性运动状态下的触地冲击的柔顺性设计是研究难点,复合弹性腿和配合关节运动的柔性机体等是针对上述问题研究取得的较为重要的研究成果。如日本大阪大学的SQ43机器人和韩国庆北大学的ELIRO机器人,都是利用柔性脊柱和腰关节实现机体灵活运动的例子,与上述研究同步,生物力学研究成果表明,生物腿部肌肉、膝关节半月板等具有较好的触地冲击缓冲特性,因此,基于仿生学开展机器人腿部肌肉柔性机理研究与设计将是新的研究方向。
3.2 机器人腿关节驱动形式
腿式机器人关节驱动可分为电机驱动、液压驱动和人工肌肉驱动等,其中具有高负载能力的液压驱动及基于生物肌肉布置形式的仿肌肉肌群结构驱动是研究热点。
电机驱动需要大力矩高增益的电机驱动系统,且机器人运动需要多关节协调控制,由此带来复杂度高、能量效率低和运动性能受限等缺点,可采用RV减速器、稀土永磁电机、超声电机或球形电机等克服传动链长的问题。
液压驱动的特点为响应速度高、负载能力强等,广泛应用于快速运动和高负载领域。著名的有美国波士顿动力公司开发的BigDog及Petman、瑞典梅拉达伦大学的Dasher、意大利理工大学的HyQ、韩国工业技术研究院的qRT-1和我国山东大学研制的液压驱动四腿式机器人。
人工肌肉驱动的研究旨在研究和开发更接近生物肌肉特性的仿生材料及驱动装置,目前研究较为活跃的人工肌肉分别是形状记忆合金(SMA)、压电陶瓷(PZT)和气动人工肌肉(PMA)等。图14为日本东京大学开发的气动人工肌肉四腿式机器人PIGORASS。图17为韩国庆北大学研制的可实现动态步行的SMA驱动四腿式机器人。SMA驱动器的缺点是响应速度慢、位移量小和寿命短等;压电陶瓷驱动器的缺点是成本高;气动人工肌肉驱动器的缺点在于高精度控制困难。
同时,附带弹性环节的驱动系统是一种新型的耦合驱动形式,美国波士顿动力公司的Big-Dog、日本东京理科大学的Rush和加拿大的PAW均采用这种方案,其特点在于提高柔性,改善着地阻抗控制等。日本的Tekken和瑞典的Dasher则采用跷结构以实现能量吸收与释放;另外一种新型驱动结构为类肌群驱动,如瑞士苏黎世大学开发的肌肉肌腱机器人Ecci、美国弗尼吉亚理工大学肌肉驱动双腿式机器人CHARLI和日本东京大学开发的气动人工肌肉四腿式机器人PIGORASS等均为类肌群驱动结构的工程应用。
3.3 导航技术
导航技术是实现腿式机器人自主运动的重要保障,而立体视觉技术是机器人导航的主要方法。
具体实例如:文献[6]中的ASIMO通过视觉传感器对多个移动体进行辨别,并判断出相互间的距离和方向,从而避免碰撞并绕行。文献[24]中的BISAM采用双目立体视觉系统和光学三角法测量导航定位。文献[29]中的BigDog采用美国喷气推进实验室(jet propulsion laboratory)的立体视觉系统,集成了双目立体视觉系统用于获取3D地形信息和路径查找。文献[52]中的TekkenⅢ自携动力自主导航机器人,采用基于DIMM-PC的CCD摄像机和激光测距仪进行导航。文献[37]中的AiDIN利用CCD传感器进行视觉采集。文献[46]中的ELIRO采用CMOS摄像头进行视觉采集,实现目标寻找、捕捉和拾取[41]等。
3.4 运动稳定控制判据
稳定性分析是机器人稳定运行的基础,稳定性判据主要有零力矩点[53]、稳定裕度[54]、庞加莱映射判据和足部旋转指示[55]等。
零力矩点(zero moment point,ZMP)最早是1938年Elftman在研究人的生物力学时提出的,1969年Vakobratovic将ZMP引入步行机器人领域[53]。此后,ZMP理论进一步完善和发展,成为腿式机器人研究领域应用最为广泛的稳定性判据。其核心思想是要确保支撑相内机器人与地面完全接触,使得各个自由度直接可控,避免出现翻转的情形。2004年,Vakobratovic又对ZMP做了补充,提出虚拟零力矩点(fictitious zero moment point,FZMP)的概念。ZMP判据通过描述约束来间接反映静态和动态步行的平衡性,将支撑约束运动范围缩小,但对动态运动解释较为困难。
稳定裕度(stability margin,SM)是 McGhee和Frank于1968年首次提出的,其定义为机器人重心在足支撑平面上的垂直投影点到各足支撑点构成的多边形各边的最短距离,但稳定裕度仅适用于机器人水平面运动[54]。
庞加 莱 回 归 映 射 (Poincare return map,PRM)是研究周期性运动存在和稳定性的重要工具,而极限环是庞加莱回归映射上的不动点。理想状态下,机器人质心的运动轨迹具有周期性,在状态空间表现为极限环,因而腿式机器人运动稳定性研究可简化为对庞加莱映射极限环的稳定性研究[56]。
针对双腿式机器人,文献[57]在分析ZMP判据和庞加莱回归映射判据的基础上,提出截面映射(section-map)稳定性理论。
3.5 控制算法
3.5.1 运动规划
运动规划方法主要有基于生物运动数据的规划方法、基于ZMP几何约束的运动规划方法和状态网络规划方法等,而区别于离线规划加在线修正的实时运动规划是研究热点。
19世纪末,Muybridge用连续摄影的方法研究动物运动步态,20世纪60年代末,McGhee在总结前人对动物步态研究成果的基础上,比较系统地给出了一系列描述和分析步态的严格数学定义,为步态的分析研究奠定了比较完整的数学基础[58]。借助运动捕捉系统和生物运动研究运动规划,并由关节控制器伺服跟踪期望轨迹,是一种常用的方法,但该方法易导致机器人在路面环境变化和外力干扰条件下出现失稳现象,而动态步态规划及实时轨迹生成则是有效的解决方案。
基于ZMP几何约束的运动规划方法等价于产生满足这一约束条件的步行规划问题,基本思路有两种,可通过先设计关节运动轨迹再确定ZMP轨迹的方法设计关节运动轨迹,也可以通过先设计理想的ZMP轨迹再确定关节运动轨迹来确定各部分关节轨迹。本田的仿人机器人基于ZMP稳定判据的几何约束法进行步态规划[59]。
状态网络规划方法的基本思想是考虑运动的起始和终止状态,将状态之间相互连接形成状态网络,以应对预先轨迹规划方法在运动适应性和灵活性方面的欠缺。
3.5.2 运动控制
多腿协调运动控制是腿式仿生机器人技术领域的研究重点和难点,主要有模型控制[60]和仿生控制[61-63]等,而基于逆动力学模型控制、神经CPG分层控制和新型CPG模型的构建是重要的研究成果。
模型控制首先对机器人及环境进行建模,然后规划出最佳运动轨迹,再利用反馈机制控制实际运动,使机器人的运动尽可能趋近理想轨迹,该方法利用机器人动力学模型进行控制,但仅对简单系统控制有效,当机器人自由度增加或出现多自由度协调控制等复杂行为时,就难以解决。针对机器人与环境的交互变化约束,文献[60]提出正交分解的浮基机器人逆动力学模型控制,通过计算环境接触逆动力学力矩用于模型控制,以提高控制柔顺性。
仿生运动控制可分为行为控制方法和节律运动控制方法。行为控制方法,通过对昆虫智能进行仿生,利用昆虫自身没有存贮、规划、控制全身各部分运动的中心控制系统,但其身体各部分却可对内部指令或外界刺激做出不同反应的机理,提出的自组织复杂行为实现控制方法,以提高环境适应性。节律运动控制是通过对动物节律运动控制机理的模拟,将中枢模式发生器、高层控制中枢、反射调节系统等生物控制机理应用于机器人控制,提高机器人环境适应性,使机器人具有更加贴近动物的运动能力[35-36,44]。文献[62]基于策略梯度,将强化学习机制引入到CPG控制,对CPG控制器进行训练,实现对双腿运动信息的自动获取。意大利Arena研究组将分层结构引入CPG控制,构建了两层CNN-CPG控制模型,分析运动步态的生成和控制,根据环境条件的变化对步态进行自适应调整,其中,高层控制应用于自组织电机脉谱并基于激励函数对样条步态进行学习,低层细胞神经网络结构用于运动生成[63]。文献[64]将傅里叶级数和循环神经网络引入到CPG模型,构建仿生控制器,不仅可以产生带极限环的稳定四足步态,而且可以任意波形调整输出周期。文献[65]利用耦合霍普夫振子进行CPG设计,产生全方位运动所需的步进运动。
3.5.3 抗干扰姿态控制
抗干扰姿态控制面向机器人运动过程中要承受的路面不平整、碰撞和打滑等结构化与非结构干扰,对可能出现的运动失效或摔倒等进行控制,常用方法为ZMP补偿控制。
文献[16]采用随机策略梯度强化学习算法,使机器人学习不同地形和坡度下的步态,并迅速适应地形和坡度变化,实现快速收敛。文献[29]中的BigDog通过调整机体高度和姿态或通过调整落脚位置两种方式适应地形变化,机器人爬坡时,机体前倾,下坡时,机体后倾,并在沿轮廓线运动时保持机体侧身。文献[66]通过地面反力控制、模型ZMP控制和落脚位置控制等实现,主动控制理想ZMP和实际地面反作用力中心间的距离来控制产生反向翻转力矩以对机器人姿态进行控制,其中,地面反力控制通过修正脚的期望位置和姿态以控制实际地面反力中心位置,模型ZMP控制通过改变理想机体轨迹以控制理想ZMP到合适位置,而落脚位置控制通过修正躯体和脚的位置与姿态,以修复模型ZMP控制出现的躯体和脚的位置与姿态偏离理想状态的情况。文献[67]将预测控制应用到ZMP目标跟踪,提出利用预测控制将外界干扰力的碰撞时间信息描述为重心的速度扰动以生成支撑运动来控制期望重心轨迹,从而减小外界冲击时刻的ZMP误差。
4 存在的问题
综合分析国内外研究现状,可以看出类哺乳动物腿式仿生机器人的研究取得了较丰富的成果,尤其是在近几年中更是取得了很大的进步,但是随着人们对速度、机动性、负载能力和环境适应性等提出越来越高的要求,类哺乳动物腿式仿生机器人仍面临许多有待解决的问题:
(1)抗冲击仿生设计。机器人在运动过程中不可避免地会受到地面冲击,尤其是高速高机动性运动状态下严重的地面冲击将导致整机倾覆和运动失效,而哺乳动物在自然进化过程中形成了优良的生物骨骼肌肉力学特性,如何从生物力学出发,模拟骨骼-肌肉力学特性、生物韧带、膝关节半月板等缓冲保护特性,对柔性机体、弹性腿和柔性足等关键部位进行仿生设计是需要研究的问题。
(2)高负载驱动技术。高能量密度的液压驱动极大地提高了腿式机器人的负载能力和运动能力,但高轻质液压元件设计制造与控制及集成是液压驱动机器人开发过程中的一个瓶颈;并且从骨骼肌肉肌群结构出发,研究高能效类生物骨骼肌肉集成驱动也是研究难点。
(3)自主导航技术。自主运动是腿式仿生机器人发展的必然要求,视觉技术是腿式仿生机器人智能自主化的关键,要解决这个问题就需要研究机器人视觉系统与立体视觉测程,在机器视觉、图形图像算法处理方面增强实时性和智能性。
(4)控制理论与算法。腿式仿生机器人的研究不仅仅局限于样机研制,重要的是稳定性判据和步态规划、运动控制与姿态控制算法等基础理论的突破,尤其是高速运动状态下的运动稳定、规划与控制更是需要解决的问题。
(5)主被动关节运动耦合。机器人在运动过程中并非所有关节都为主动关节,如何借鉴腿式被动机器人研究成果,研究各种运动状态下的主动被动分离与合成,提高能量利用率,开发高能效机器人亦是研究难点。
(6)能源自给技术问题。可持续能源供应问题是制约腿式机器人长时间工作的一个瓶颈,因此,需要研究腿式机器人高可靠能源装置与可持续能源自给技术。
5 展望
通过对类哺乳动物腿式仿生机器人国内外现状的介绍和相关理论及方法分析,结合仿生机器人技术发展的总体趋势,可以预见类哺乳动物腿式仿生机器人还要在以下几个方面有所改进:
(1)非结构化环境下的柔性液压驱动。非机构化环境下的快速动态运动是腿式仿生机器人优良运动的重要实现形式,而高能量密度的液压驱动是实现高负载能力和摆动频率的重要途径,因此,液压驱动是研究方向之一,同时,配合液压驱动的智能化柔性环节集成、轻量化复合材料液压驱动元件及控制亦将是需要解决的问题;
(2)仿肌群结构驱动。生物肌肉在瞬间爆发、吸震缓冲、能量密度等方面具有优良的特性,基于生物解剖学与骨骼肌肌小节串并联结构生物力学特性和生物神经控制,研究类生物骨骼肌肉模拟集成、类肌群直接驱动和类神经控制技术,将大大提高腿式仿生机器人的适应性、稳定性和强度等。
(3)自主导航运动。非结构化环境的内在特性制约了腿式仿生机器人的模型控制,而视觉技术是腿式仿生机器人克服环境制约的重要研究途径之一,因而,利用立体视觉技术提高非结构化环境下机器人的智能化和自主化是腿式仿生机器人技术发展的必然。
6 结束语
本文从类哺乳动物双腿式机器人和四腿式机器人两个方面介绍了国内外腿式仿生机器人的研究现状,分析和讨论了相关理论与方法及存在的问题,并对未来的发展趋势进行了预测。
总体上说,类哺乳动物腿式机器人朝着高速、高机动、高负载、高自主化和高适应性的方向发展,其中,美国在这方面的研究处于领先位置。与此同时,基于生物力学的仿肌群串并联结构驱动也将成为一个新的研究方向。
[1]谭民.先进机器人控制[M].北京:高等教育出版社,2007.
[2]Mail Daily.The Real Life C-3po:World’s Most Advanced Robot Has Muscles,Tendons and Ability to Correct Its Own Mistakes[EB/OL].[2011-12-21].http://www.dailymail.co.uk/sciencetech/article-2007740/ecci-worlds-advanced-robotmuscles-tendons--ability-correct-mistakes.html.
[3]Guizzo E.Virginia Tech’s Humanoid Robot Charli Walks Tall[EB/OL].[2011-12-21].http://spectrum. ieee. org/automaton/robotics/humanoids/042810-virginia-tech-humanoid-robot-charli-walks-tall.
[4]Dynamics Boston.Petman[EB/OL].[2011-12-21].http://www.bostondynamics.com/robot_petman.html.
[5]University Mälardalen.Dasher[EB/OL].[2011-12-21].http://www.dasher.se/.
[6]Honda.Asimo[EB/OL].[2011-12-21].http://www.honda.com.cn/technology/asimo/a_first.html.
[7]Park I,Kim J,Lee J.Mechanical Design of Humanoid Robot Platform Khr-3[C]//Proceedings of the 5th IEEE-RAS International Conference on Humanoid Robots.Tsukuba,Japan:IEEE,2005:321-326.
[8]Gouaillier D,Hugel V,Blazevic P.Mechatronic Design of Nao Humanoid[C]//Proceedings of the IEEE International Conference on Robotics and Automation.Kobe,Japan:IEEE,2009:769-774.
[9]谢涛,徐建峰.神经网络及误差补偿在HIT-Ⅲ双足机器人步态规划中的应用[J].中国机械工程,2003,14(2):131-133.
Xie Tao,Xu Jianfeng.Application of Neural Network and Error Compensation in the HIT-double Foot Robot Gait Planning[J].China Mechanical Engineering,2003,14(2):131-133.
[10]马宏绪,张彭.两足步行机器人研究[J].高技术通讯,1995,5(9):17-20.
Ma Hongxu,Zhang Peng.Enhanced Study of Biped Locomotion Robot[J].High Technology Letters,1995,5(9):17-20.
[11]Huang Q,Nakamura Y.Sensory Reflex Control for Humanoid Walking[J].IEEE Transactions on Robotics,2005,21(5):977-984.
[12]伊强,陈恳,刘莉.小型仿人机器人THBIP-Ⅱ的研制与开发[J].机器人,2009,31(6):587-593.
Yi Qiang,Chen Ken,Liu Li.Research and Development of Kid-size Humanoid Robot Thbip_II[J].Robot,2009,31(6):587-593.
[13]王立权,俞志伟.双足机器人Heubr_1样机研制与实验研究[J].机器人,2009,31(5):453-459.
Wang Liquan,Yu Zhiwei.Experimental Study and Prototype Development of Biped Robot Heubr_1[J].Robot,2009,31(5):453-459.
[14]Collins S H,Wisse M,Ruina A.A Three-dimensional Passive-dynamic Walking Robot with Two Legs and Knees[J].International Journal of Robotics Research,2001,20(7):607-615.
[15]Locomotion and Robotics.Ranger[EB/OL].[2011-12-21].http://ruina.tam.cornell.edu/research/topics/locomotion _and _robotics/ranger/ranger2011/index.html.
[16]Tedrake R,Zhang T W,Seung H S.Stochastic Policy Gradient Reinforcement Learning on a Simple 3DBiped[C]//Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems.Sendai,Japan:IEEE,2004:2849-2854.
[17]Wisse M.Essentials of Dynamic Walking:Analysis and Design of Two-legged Robots[D],Delft:Auditorium of Delft University of Technology,2004.
[18]Wisse M,Hobbelen D G E,Schwab A L.Adding an Upper Body to Passive Dynamic Walking Robots by Means of a Bisecting Hip Mechanism[J].IEEE Transactions on Robotics,2007,23(1):112-123.
[19]Wisse M.Three Additions to Passive Dynamic Walking;Actuation,an Upper Body,and 3DStability[C]//Proceedings of the IEEE-RAS International Conference on Humanoid Robots.California,USA:IEEE,2005:113-132.
[20]张佩杰.欠驱动双足机器人行走步态建模与动态行走控制策略研究[D].长春:吉林大学,2010.
[21]毛勇,王家廞,贾培发.双足被动步行研究综述[J].机器人,2007,29(3):274-280.
Mao Yong,Wang Jiaxin,Jia Peifa.Passive Dynamic Bipedwalking:A Survey[J].Robot,2007,29(3):274-280.
[22]Raibert M H.Legged Robots[J].Communications of the ACM,1986,29(6):499-514.
[23]Christian R,Johan I,Freyr H.The Basic Design of the Quadruped Robot Warp1[C]//Proceedings of the International Conference on Climbing and Walking Robots.Stockholm,Sweden,2000:1-8.
[24]Berns K,Ilg W,Deck M.Mechanical Construction and Computer Architecture of the Four-legged Walking Machine Bisam[J].IEEE/ASME Trans-actions on Mechatronics,1999,4(1):32-38.
[25]Hilljegerdes J,Spenneberg D,Kirchner F.The Construction of the Four Legged Prototype Robot Aramies[J].Climbing and Walking Robots,2006,2(1):335-342.
[26]Semini C.HyQ-design and Development of a Hydraulically Actuated Quadruped Robot[D],Genoa:Italian Institute of Technology,2010.
[27]Steeves C,Buehler M,Penzes S G.Dynamic Behaviors for a Hybrid Leg- wheel Mobile Platform[C]//Proceedings of the International Conference on spie.Orlando,USA,2002:75-86.
[28]Raibert M,Chepponis M.Running on Four Legs as though They Were One[J].IEEE Journal of Robotics and Automation,1986,2(2):70-82.
[29]Raibert M,Blankespoor K,Nelson G.Bigdog,the Rough-terrain Quaduped Robot[C]//Proceedings of the 17th International Federation of Automation Control.Seoul,Korea,2008:10822-10825.
[30]Murphy M P,Saunders A,Raibert M.The Littledog Robot[J].International Journal of Robotics Research,2011,30(2):145-149.
[31]Estremera J,Waldron K J.Thrust Control Stabilization and Energetics of a Quadruped Running Robot[J].International Journal of Robotics Research,2008,27(10):1135-1151.
[32]Hodoshima R,Doi T,Fukuda Y.Development of Titan XI:A Quadruped Walking Robot to Work on Slopes[C]//Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems.Sendai,Japan:IEEE,2004:792-797.
[33]Mizuuchi I,Matsuki T,Inaba M.柔軟脊椎構造を持つ四脚ロボットの GAによる動作生成[C]//第17回日本ロボット学会学術講演会.東京,日本,1999:199-200.
[34]Yamada Y,Nishikawa S,Shida K.Neural-body Coupling for Emergent Locomotion:A Musculoskeletal Quadruped Robot with Spinobulbar Model[C]//Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems.San Francisco,USA:IEEE,2011:1499-1506.
[35]Maufroy C,Kimura H,Takase K.Integration of Posture and Rhythmic Motion Controls in Quadrupedal Dynamic Walking Using Phase Modulations Based on Leg Loading/Unloading[J].Autonomous Robots,2010,28(3):331-353.
[36]Zhang Z G,Kimura H.Rush:A Simple and Autonomous Quadruped Running Robot[J].Journal of Systems and Control Engineering,2009,223(3):323-336.
[37]Koo I M,Trong T D,Kang T H.Control of A Quadruped Walking Robot Based on Biologically Inspired Approach[C]//Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems.San Diego,USA:IEEE,2007:2969-2974.
[38]Intelligent Robotics & Mechatronic System Laboratory.Aidin Robot[EB/OL].[2011-12-21].http://mecha.skku.ac.kr/board/list.php?bbs_id=Robotics_03.
[39]Park S H,Kim D S,Lee Y J.Discontinuous Spinning Gait of a Quadruped Walking Robot with Waist-joint[C]//Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems.Edmonton,Canada:IEEE,2005:2744-2749.
[40]Park S,Lee Y J.Entertainment Walking Robot that Feeds on Batteries[C]//Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems.San Diego,USA,2007:2035-2040.
[41]Son H M,Gu J B,Park S H.Design of New Quadruped Robot with Sma Actuators for Dynamic Walking[C]//Proceedings of the International Joint Conference on SICE-ICASE.Busan,Korea,2006:344-348.
[42]Kim H K,Won D,Kwon O.Foot Trajectory Generation of Hydraulic Quadruped Robots on Uneven Terrain[C]//Proceedings of the International Conference on Automation Control.Seoul,Korea,2008:3021-3026.
[43]封锡盛.从有缆遥控水下机器人到自治水下机器人[J].中国工程科学,2000,2(12):29-33.
Feng Xisheng.From Remotely Operated Vehicles to Autonomous Undersea Vehicles[J].Engineering Science of China,2000,2(12):29-33.
[44]张秀丽.四足机器人节律运动及环境适应性的生物控制研究[D].北京:清华大学,2004.
[45]Sun L,Meng M Q H,Chen W M.Design of Quadruped Robot Based Cpg and Fuzzy Neural Network[C]//Proceedings of the IEEE International Conference on Automation and Logistics.Jinan,China:IEEE,2007:2403-2408.
[46]冯华山,王润孝,赵国斌.基于Kalman滤波的四足机器人姿态数据处理方法[J].中国制造业信息化,2008,37(19):37-44.
Feng Huashan,Wang Runxiao,Zhao Guobin.The Kalman Filter- based Attitude Data Processing Method for Quadruped Robot[J].Manufacture Information Engineering of China,2008,37(19):37-44.
[47]李军,王润孝,冯华山.四足机器人静步态直线行走规划研究[J].计算机仿真,2009,26(6):183-186.
Li Jun,Wang Runxiao,Feng Huashan.Research on Static Linear Walking of Quadruped Robot[J].Computer Emulation,2009,26(6):183-186.
[48]山东大学机器人研究中心.液压驱动机器人[EB/OL].[2011-12-21].http://www.sucro.org/ShowNews.asp?id=3858
[49]俞志伟,戴振东,郭策,等.一种液压驱动式四足机器人:中国,CN102001371A[P].2011-04-06.
[50]Roston G P,Endsley E.Transformable Mobile Robot:US,608673[P].2000-05-30.
[51]Hashimoto K,Sugahara Y,Tanaka C.Unknown Disturbance Compensation Control for a Biped Walking Vehicle[C]//Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems.San Diego,USA:IEEE,2007:2204-2209.
[52]Yasuhiro F,Katabuchi H,Kimura H.Dynamic Locomotion of Quadrupeds “Tekken 3 & 4”Using Simple Navigation System[J].Journal of Robotics and Mechatronics,2010,22(1):36-42.
[53]Vukobratovi M,Borovac B,Potkonjak V,ZMP:A Review of Some Basic Misunderstandings[J].International Journal of Humanoid Robotics,2006,3(2):153-176.
[54]Mc Ghee R B,Frank A A.On the Stability Properties of Quadruped Creeping Gaits[J].Mathematical Biosciences,1968,3(1):331-351.
[55]Goswami A.Postural Stability of Biped Robots and the Foot-rotation Indicator Point[J].International Journal of Robotics Research,1999,18(6):523-533.
[56]Chevallereau C,Westervelt E R,Grizzle J W.Asymptotically Stable Running for a Five-link,Four-actuator,Planar Bipedal Robot[J].International Journal of Robotics Research,2005,24(6):431-435.
[57]Fu C L,Chen K.Section-Map Stability Criterion for Biped Robots Part I:Theory[C]//Proceedings of the International Conference on Mechatronics and Automation.Harbin.China,2007:1529-1534.
[58]McGhee R B.Some Finite State Aspects of Legged Locomotion[J].Mathematical Biosciences,1968,2(1):67-84.
[59]Hirai K.Current and Future Perspective of Honda Humamoid Robot[C]//Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and System.Grenoble,France:IEEE,1998:500-508.
[60]Mistry M,Buchli J,Schaal S.Inverse Dynamics Control of Floating Base Systems Using Orthogonal Decomposition[C]//Proceedings of the 2010 IEEE International Conference on Robotics and Automation.Anchorage,USA:IEEE,2010:3406-3412.
[61]Ijspeert A J.Central Pattern Generators for Locomotion Control in Animals and Robots:A Review[J].Neural Networks,2008,21(4):642-653.
[62]Mori T,Nakamura Y,Sato M.Reinforcement Learning for Cpg-driven Biped Robot[EB/OL].[2011-12-21].http://www.aaai.org/Papers/AAAI/2004/AAAI04-099.pdf
[63]Arena P,Fortuna L,Frasca M.An Adaptive Selforganizing Dynamical System for Hierarchical Control of Bio-inspired Locomotion[J].IEEE Transactions on Systems,Man,and Cybernetics,Part B:Cybernetics,2004,34(4):1823-1837.
[64]Tran D T,Koo I M,Vo G L.A New Method in Modeling Central Pattern Generators to Control Quadruped Walking Robots[C]//Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems.Louis,USA:IEEE,2009:129-134.
[65]Matos V,Santos C P.Omnidirectional Locomotion in a Quadruped Robot:A Cpg-based Approach[C]//Proceedings of the 2010IEEE/RSJ International Conference on Intelligent Robots and Systems.Taipai,China:IEEE,2010:3392-3397.
[66]Hirose M,Ogawa K.Honda Humanoid Robots Development[J].Philosophical Transactions of the Royal Society A:Mathematical,Physical and Engineering Sciences,2007,365(1850):11-20.
[67]Kanzaki S,Okada K,Inaba M.Bracing Behavior in Humanoid through Preview Control of Impact Disturbance[C]//Proceedings of the IEEE-RAS International Conference on Humanoid Robot.Tsukuba,Japan:IEEE,2005:301-305.
猜你喜欢
现代仪器与医疗(2022年4期)2022-10-08
汽车实用技术(2022年7期)2022-04-20
中老年保健(2021年3期)2021-08-22
房地产导刊(2020年11期)2020-12-28
铁道通信信号(2019年4期)2019-10-10
制造技术与机床(2019年7期)2019-07-22
电子制作(2019年7期)2019-04-25
电子制作(2018年18期)2018-11-14
科学之谜(2018年4期)2018-09-17
无人机(2017年10期)2017-07-06
