
电静液作动器的建模仿真与试验研究
2013-07-18 06:07习仁国刘卫国陈焕明
机床与液压 2013年19期
习仁国,刘卫国,陈焕明
(西北工业大学,陕西西安710072)
液压系统具有功率质量比大、惯性小、稳态性好和动态响应快、运动平稳等优点,使其在飞机上得到了广泛应用。随着电子电力和控制技术的发展,新材料的不断开发,现代科技逐渐影响着传统的液压技术:一是现代飞机的高性能作战需求使得飞机操纵系统也在发生变革;二是由于液压系统本身所固有的一些问题使得它在飞机上的应用又受到了一定的限制。为了克服液压系统的弱点和满足未来飞机的设计需求,发展新型液压系统已成为必然趋势。
20世纪70年代后期,随着高磁能和稀土永磁材料的研究与应用,以及大功率半导体驱动器件的出现,使得驱动电机具有输入功率大、转动惯量小、效率高等特点,同时材料、控制和精密制造等技术的飞速发展,也为新型作动系统的研制创造了条件,各种新技术和新型作动器在飞机上开始了应用,如直接驱动舵机、组合舵机、电静液作动器、电动舵机、智能材料驱动舵机等。新技术的广泛应用也为多电/全电飞机的发展提供了一个基础,从而促进了功率电传作动系统的发展。
EHA(Electro-Hydrostatic Actuator)是功率电传的一种,其核心是取消集中式液压能源系统,集机、电、液于一体。其优点在于提高飞机生存力,改善飞机维护性,降低飞机对地面保障设施的要求,减小由于液压油燃烧引起火灾的可能性,便于实现机载机电系统综合;同时提高了效率,避免了用节流方式的功率分配,动力源和指令不再需要长长的液压管路等等。
作者根据其工作原理设计了一种EHA,对其进行建模和仿真分析,并进行试验验证。
1 发展综述
美国以EHA为主的功率电传作动器研究始于20世纪60年代末,迄今己进行了40多年的研究和探索,并实施了多项大规模的研究计划,如美国国家航空和宇宙航天局 (NASA)的多电飞机MEA(More Electric Aircraft)计划、美国空军提出的电力作动器计划EPAD(Electrically Powered Actuation Design)和洛克希德马丁公司 (Lockheed Martin)的一体化作动系统研究计划等。1995年1月,美国空军在F-18SRA上首飞了EHA,共试飞33次,约28.5 h。1998年,C-141副翼上EHA完成近1 000 h的飞行试验。
Lockheed Martin公司为验证JSF(Joint Strike Fighter)的多项关键子系统技术,改装了一架F-16战斗机,把主飞行控制系统原有的液压作动器拆除,换上5个EHA。试飞的J/IST(J/Integrated Subsystems Technology)飞机速度为马赫数1.3,加速度5g,高度9 144 m。在1998年8月进行了4个月的地面试验,1999年进行了6个月约60次的飞行验证试验。EHA飞行控制系统无差错地执行了整个计划,试飞员认为其操纵品质与标准的F-16不相上下。J/IST飞行验证计划的成功为EHA技术在联合攻击战斗机计划中的应用铺平了道路。如图1所示为Parker公司研制的EHA,已经通过J/IST验证,JSF将成为第一种把EHA技术应用到初级飞行控制上的战斗机。
图1 用于JSF的EHA
Moog公司设计开发的EHA也在F-35上进行了试飞验证,其种类比较多,主要用于飞机的方向舵、平尾、襟副翼的操纵。
20世纪80年代初,英国卢卡斯 (Lucas)公司也开展了EHA的研究,设计出多种集成EHA,并进行了试飞验证。法国也开展了EHA的设计研究,并应用于A380上。
到目前为止,美国空军研究所 (USAF)、Dryden飞行研究中心、Boeing、GE、Moog和Parker公司以及英国、德国、加拿大、日本、法国、新加坡等国家的多个企业、大学和研究所,都在进行EHA的研究开发。
在国内,EHA研究开发起步较晚。1996年,南京航空航天大学为某型直升机旋翼操纵系统研制了一种电动舵机系统,该系统采用滚珠螺旋副和基于智能功率电路的PWM伺服放大器,具有精度高、频带宽、线性度好、效率和线位移输出方式等特点,有良好的动态响应。北京航空航天大学对机载作动系统进行了深入的研究,特别是容错结构设计取得了阶段性的成果。中航工业第609研究所在20世纪80年代就开展小功率EHA的原理性研究,并进行了试验验证,从而取得了一些关键部件的突破。此外,中航工业第618研究所、北京理工大学等也在开展EHA研究工作。
通过对EHA的原理性研究,我国在EHA方面虽然取得了一定的成果,但还没有进行工程验证。从研究成果看,国外已经完成了EHA试飞验证,并在F-35、A380上开始应用,而国内虽然成功研制出了原理样机,但工程应用还处于研究开发阶段。从技术上看,我国与国外的主要差距体现在:270 V DC电机的设计与开发技术、液压泵技术、电机控制技术、集成技术、系统热分析及其控制技术等。
2 原理分析
根据EHA的用途,各国对EHA的设计方案都不一样。作者在研究比较国外各种EHA方案的基础上,按定排量变转速型方案设计了一种EHA。它是由控制器、电机、定量泵、蓄能器、单向阀、阻尼旁通阀、安全阀、对称液压作动器、270 V DC电源及各种传感器等组成,并对这些元器件进行集成设计,形成一个封闭式的EHA系统。其液压原理图如图2所示。
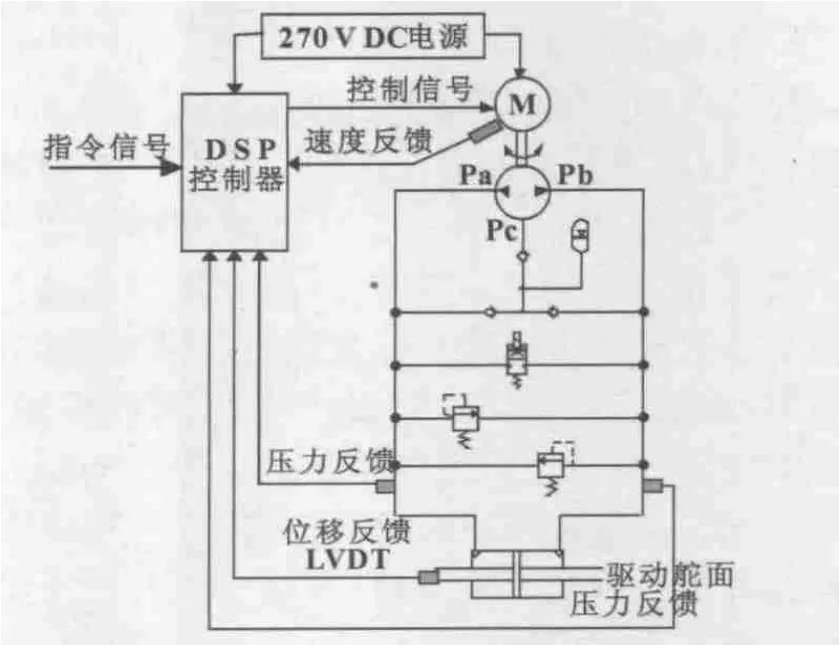
图2 EHA原理图
系统能源为270 V DC电源。控制器按照指令控制电机的转速和转向,驱动双向定量泵运转。蓄能器通过两个单向阀连接到系统,为系统进行补油,保持系统的最低压力,防止泵反转吸油时发生气穴现象。同时,蓄能器通过单向阀连接到定量泵的壳体,使其壳体回油可返回到蓄能器中。系统中两腔之间设置了两个安全阀,防止系统中两腔压力过高。作动器在油压的作用下带动负载进行运动。速度、压力和位移等传感器将系统的指标反馈给控制器,控制器进行比较综合后给电机发出指令,进而控制电机运动。通过控制电机的转速和转向来控制作动器动作的方向和速率,形成一个闭环控制系统。系统中还设置了一个阻尼旁通阀,当作动器发生故障时,阻尼旁通阀开启,泵排出的油液经阻尼旁通阀返回到泵的吸油口,此时作动器对负载不发生作用,便于其他余度舵机工作。
EHA中最关键的部件是电机。电机是传统电气工程的一个重要分支,早在20世纪20年代,异步电机、同步电机等传统电机设计技术的研究已达顶峰。随着科学技术的发展,稀土永磁材料的不断应用,电机设计又迈上了一个新的阶段,各种高性能电机不断地设计开发出来,如永磁同步电机、无刷直流电机、开关磁阻电机等。EHA所用电机一般采用稀土永磁无刷直流电机,其核心是在电机转子惯量小、电磁负荷设计合理的前提下,电机效率高、功率密度大、高温性能稳定等。其功率主电路采用电压源型IGBT三相全桥逆变器,主电源采用270 V DC电源进行供电,拓扑结构如图3所示。
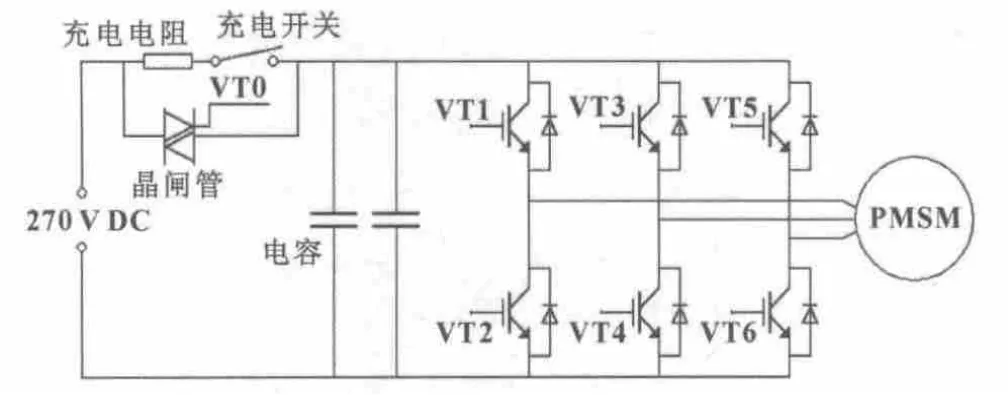
图3 主功率电路拓扑
EHA电机控制器采用DSP技术,同时为确保控制器在大功率、强干扰条件下的控制可靠性,增加以CPLD进行功率器件的斩波控制,从而完成EHA在不同工况的控制功能。数字控制器原理框图如图4所示。随着DSP在电机控制方面的应用不断深入,电机控制器逐渐趋于成熟,可达到高效率、低成本、高可靠的要求。早期DSP主要用于控制算法的运算,现在数字控制系统中DSP可以处理包括自适应、多变量寻优、自校正、神经网络、遗传算法和模糊逻辑等控制算法,以及故障诊断和保护功能、与上位机的通信、数据总线的控制协议等。
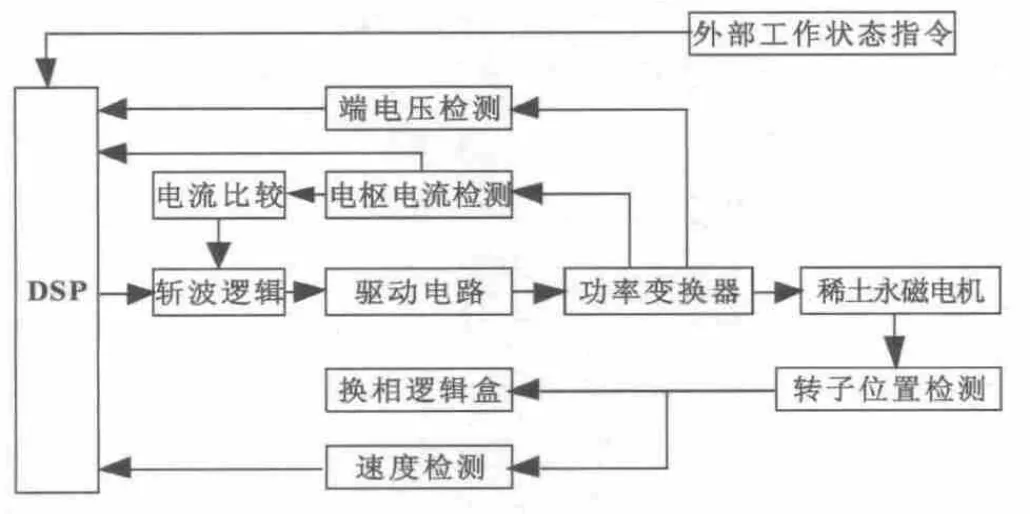
图4 数字控制器原理框图
液压泵是将机械能转化为液压能的一种能量转换装置,按其结构形式分有齿轮泵、叶片泵、螺杆泵和柱塞泵等。其中飞机上应用最多最广泛的是轴向柱塞液压泵。随着科学技术的发展,液压泵的研究、设计、加工和试验等已趋于成熟。柱塞液压泵结构紧凑,径向尺寸小,转动惯量小,转速高,也由于其主要零件柱塞和缸体均为圆柱形,加工方便,配合精度高,密封性好,工作压力高,因此EHA系统中一般选用轴向柱塞液压泵。
3 建模与仿真
液压系统的工程分析方法很成熟,在此不再赘述。这里忽略单向阀和管道的影响,EHA的液压部分是泵直接驱动作动器,作动器回油直接流回液压泵的吸油口,是一个闭式系统。
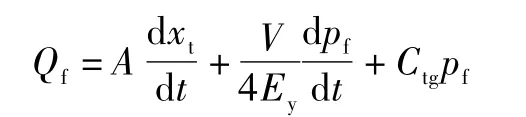
泵的线性化流量方程为:

作动器的流量连续方程为:
作动器的力平衡方程为:

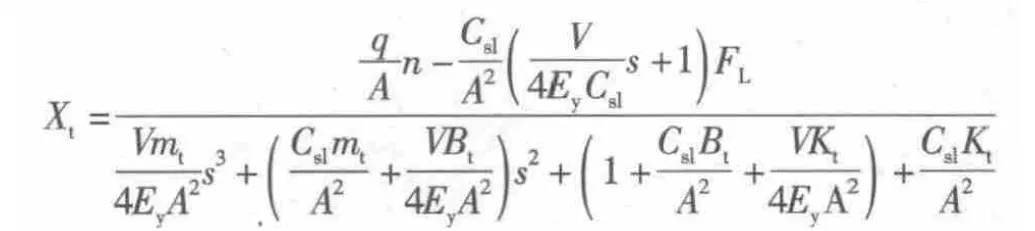
将上面三式进行拉氏变换,消去中间变量,可得系统传递函数:
系统方框图如图5所示。
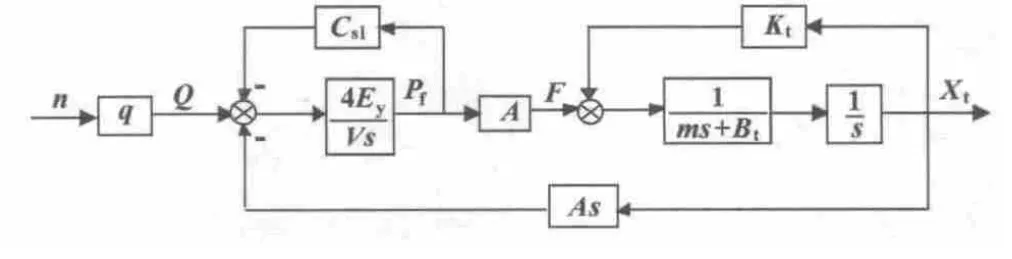
图5 系统方框图
系统传递函数考虑了惯性、阻尼及弹性负载,还考虑了油液的压缩性和作动器的泄漏等因素,在实际应用中根据特定条件可以忽略一些次要因素,这样可使传递函数进一步简化。
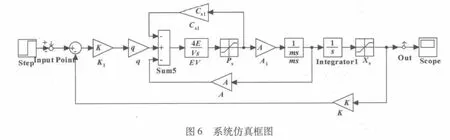
在MATLAB/Simulink环境下建立EHA仿真框图,如图6所示。
根据系统传递函数可以分析系统结构参数 (泵排量、有效容积、作动器活塞面积、泄漏系数)对系统的影响。
泵排量q的影响。q的变化会引起系统开环增益的变化,从而影响系统频率特性。图7为系统采用比例校正器时液压系统的频率特性曲线,其中曲线1和曲线2分别为q=0.8和1.2 mL/r时的液压系统的阶跃响应曲线。可以看出:q增大,系统响应速度加快,q增大会影响位移输出精度,因此设计时要综合考虑泵排量对系统结构及性能的影响。
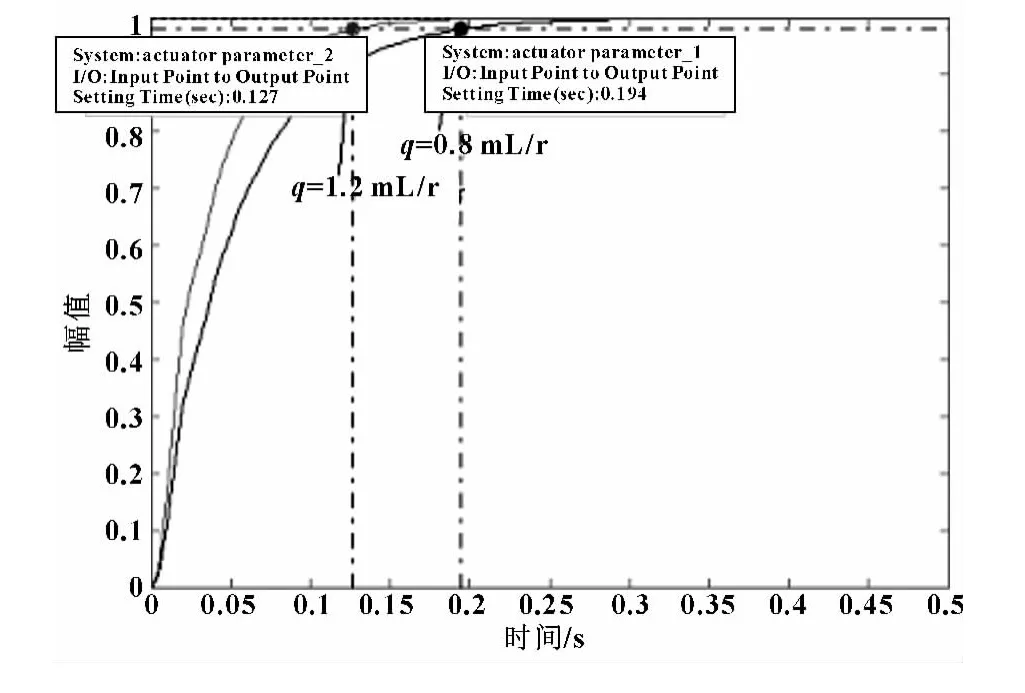
图7 排量对系统响应的影响
有效容积V的影响。V直接影响系统固有频率,V增大,固有频率降低。图8中的曲线分别表示当V=25.8和51.6 cm3时液压系统的频率特性曲线。可以看出:V增大,系统响应速度变慢。
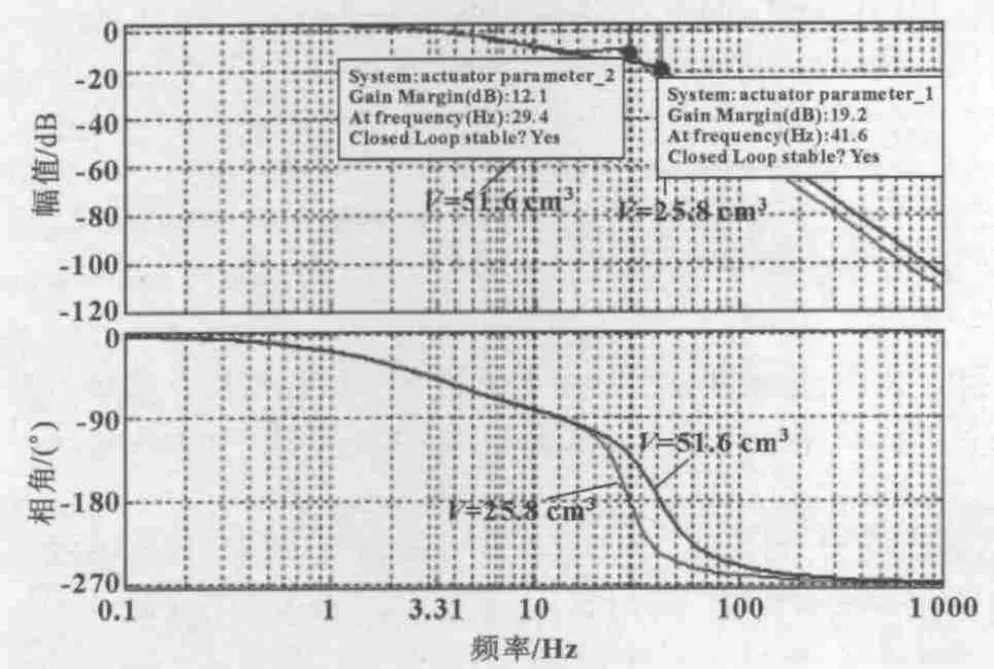
图8 有效容积对系统频率特性的影响
作动器活塞面积A的影响。A直接影响系统的固有频率,A增大,固有频率增大。图9中的曲线分别表示当A=4.96和9.92 cm2时液压系统的频率特性曲线。可以看出:A增大,系统响应速度变慢。
泄漏系数Csl的影响。图10中的曲线分别为泄漏系数Csl=0.18和0.6 cm5/(kgs)时系统的频率特性曲线。可以看出:在相同的相角裕度133.7°时,系统的稳定幅值裕度由19.2 dB增大到30.3 dB,系统稳定性得到提高。
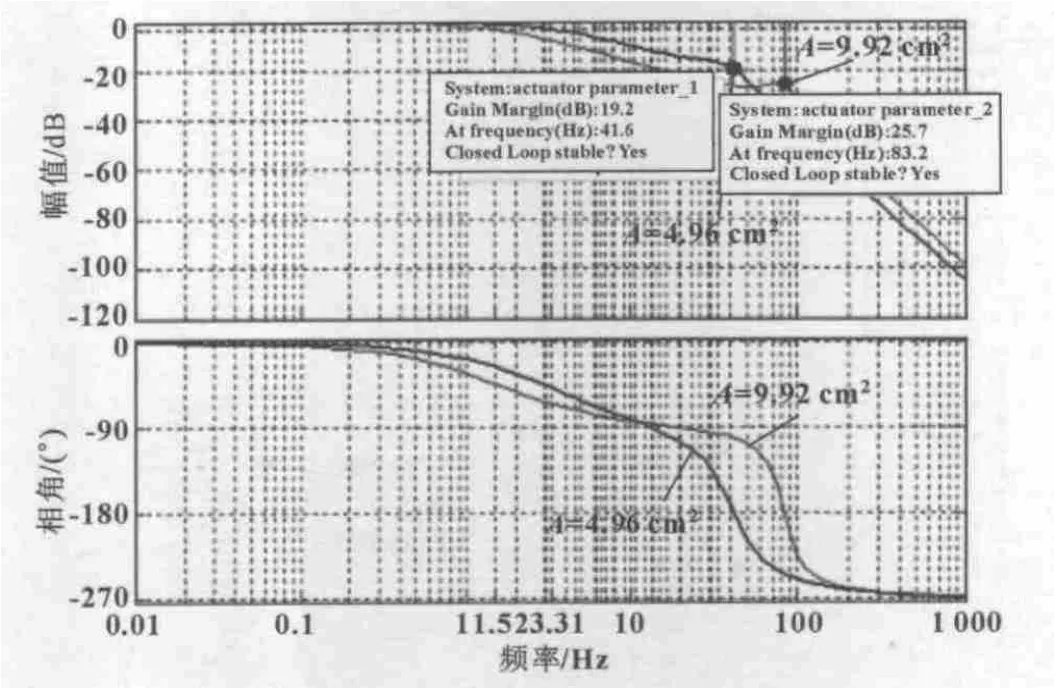
图9 作动器活塞面积对系统频率特性的影响
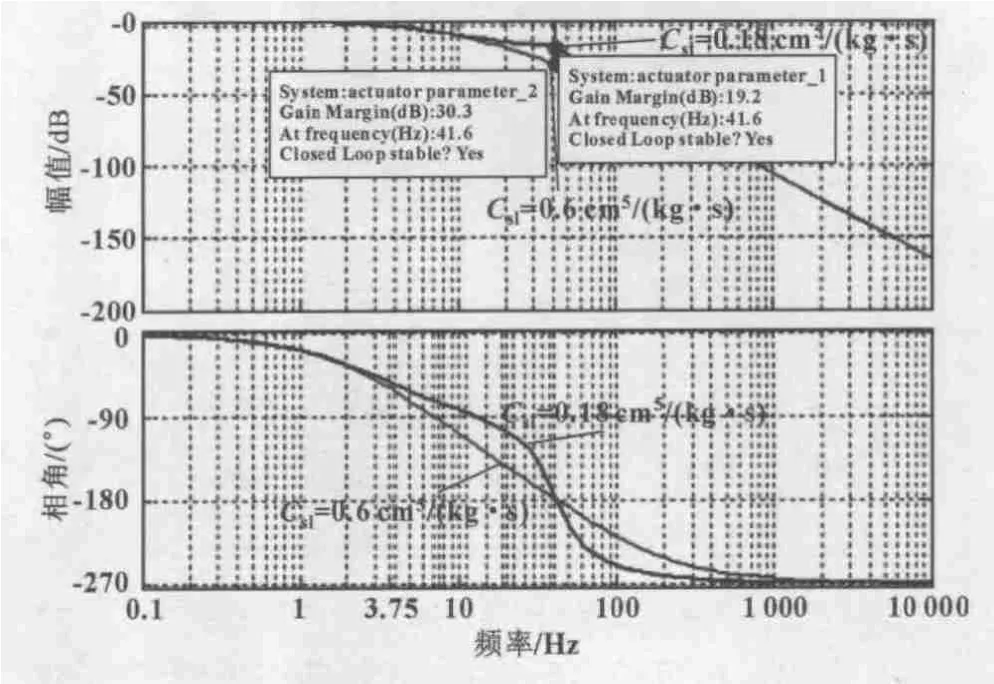
图10 泄漏系数对系统频率特性的影响
4 试验验证
对定排量变转速型EHA进行试验。试验条件:环境温度 (25±10)℃,相对湿度45% ~80%。空载状态下系统输入正弦信号,正弦信号幅值为1 V,而频率分别为0.1、1、2 Hz 3种情况,系统输出为作动器活塞杆位移,结果见图11—13。
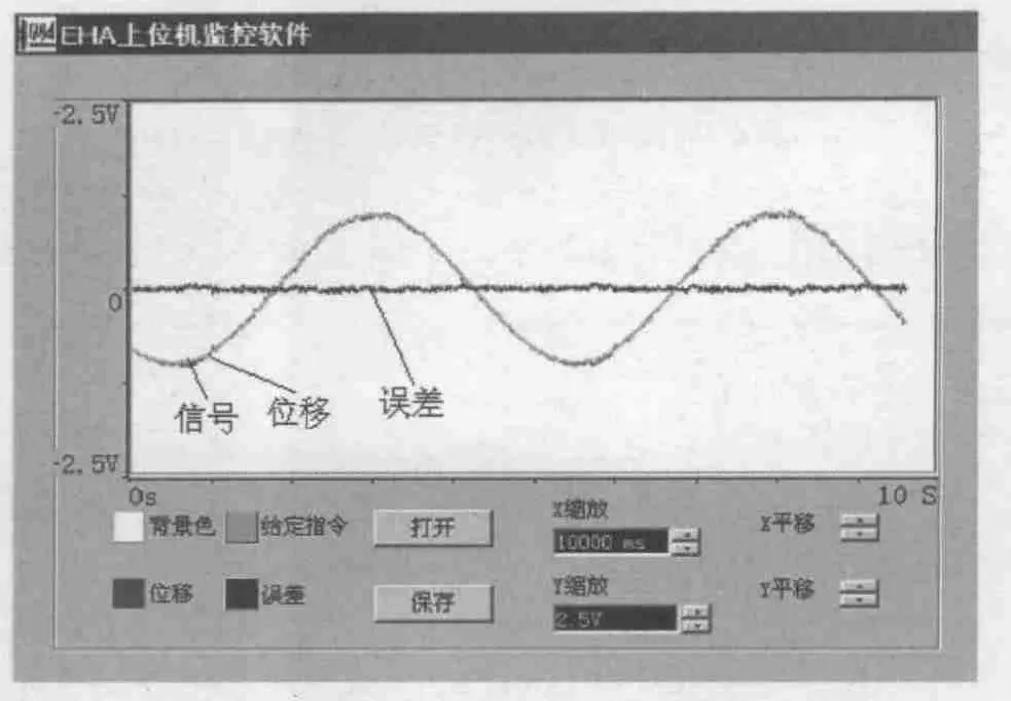
图11 频率0.1 Hz幅值1 V位移跟随曲线
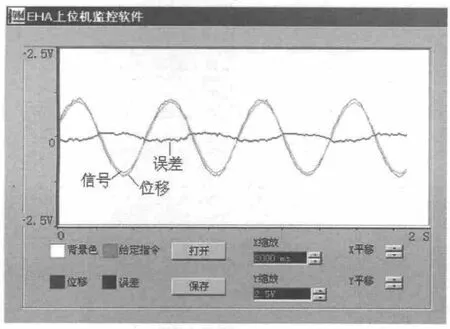
图12 频率1 Hz幅值1 V位移跟随曲线
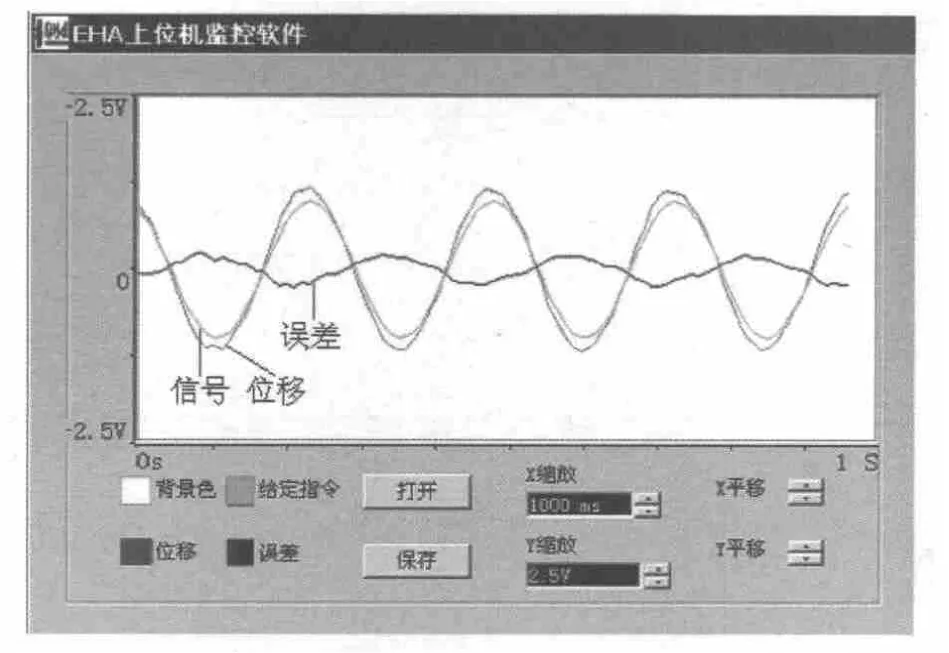
图13 频率2 Hz幅值1 V位移跟随曲线
从试验曲线可知:系统在小信号输入时,信号跟随情况良好,满足性能要求;系统在大信号输入时,信号跟随误差较大。
通过仿真和试验验证,说明所设计的定排量变转速型EHA的设计原理是正确合理的;所设计的稀土永磁无刷直流电机性能基本达到了设计要求,试验时最高控制转速达到了10 000 r/min,但性能和可靠性需要进一步提高;所设计的EHA控制系统硬件及软件原理正确,并达到了设计指标要求,说明集成式电静液作动系统是一种可行的功率电传作动系统。通过试验,该EHA还存在一些不足,需作进一步的改进和完善:(1)传感器;(2)AD转换器;(3)系统发热问题;(4)控制器功能扩展问题;(5)电机、泵、作动器等的一体化集成设计技术等。
5 结论
综述了电静液作动器EHA国内外发展动态,简述了其工作原理,按定排量变转速型方案设计了一种电静液作动器EHA,对其进行了建模和仿真分析,并进行了试验验证。仿真分析和试验结果表明,所设计的EHA及其控制系统满足技术要求,达到了预定的性能指标,是一种可行的功率电传系统,仿真分析和试验结果对EHA的系统设计和工程优化提供参考。
【1】于敦.飞机电力作动系统发展方向[R].中国航空信息中心,航空信息研究报告,HY95007,1995.
【2】CROWDER R M.Electrically Powered Actuation for Civil Aircraft[D].Southampton:Department of Electrical Engineering,University of Southampton,1996:511 -513.
【3】JENSEN S C,JENNEY G D,DAWSON D.Flight Test Experience with an Electro Mechanical Actuator on the F-18 Systems Research Aircraft[C]//Proceeding of Digital Avionics Systems Conference,2000.
【4】CROKE Steven,HERRENSCHMIDT Jack.More Electric Initiative Power-by-wire Actuation Alternatives[C]//Proceedings of IEEE'94 National Aerospace&Electronics Conference.Piscataway,1994:1338 -1346.
【5】沙南生,李军.功率电传机载一体化电作动系统的研究[J].北京航空航天大学学报,2004,30(9):909 -912.
【6】曹云峰,翁新根,杨巧旭.一种新型电动舵机系统[J].南京航空航天大学学报,1996,28(5):679-682.
【7】JAHNS T M,VAN NOCKER R C.Electric Controls for a High-performance EHA Using an Interior Permanent Magnet Motor Drive[C]//Aerospace and Electronics Conference,1989:346 -354.
【8】李军,付永领,王占林.机载电静液作动系统的发展现状与关键技术研究[J].航空制造技术,2005(11):73-77.
【9】李军,付永领,王占林.新型机载一体化电液作动器的系统设计与仿真[J].系统仿真学报,2004,16(6):1128-1131.
【10】李军,付永领,王占林,等.一种新型机载一体化电液作动器的设计与分析[J].北京航空航天大学学报,2003,29(12):45-48.
猜你喜欢
铁道通信信号(2020年11期)2020-02-07
汽车与新动力(2019年5期)2019-11-07
测控技术(2018年11期)2018-12-07
电测与仪表(2017年20期)2017-12-19
西安航空学院学报(2017年3期)2017-07-05
北京航空航天大学学报(2016年2期)2016-12-01
西部广播电视(2015年17期)2016-01-18
电子器件(2015年5期)2015-12-29
浙江大学学报(工学版)(2015年8期)2015-03-01
贺州学院学报(2015年1期)2015-02-28
