
基于红外传感器ST188的自动循迹小车设计
2013-07-13 06:30兰羽
电子设计工程 2013年3期
兰羽
(陕西工业职业技术学院 电气学院,陕西 咸阳 712000)
自动循迹小车控制系统,也就是最简单的轮式机器人,适合在一些特殊环境中工作,因其成本低廉,目前已在许多工业场合已获得广泛应用。例如高温高压环境、有毒有害气体环境以及外星探测等都有机器人的应用[1],所有这些应用正逐步渗入到工业生产和我们日常生活的各个层面。本文采用红外传感器ST188,单片机AT89S51为控制核心,设计了一种具有自动寻迹功能的小车系统。
1 系统方案
自动循迹小车控制系统由红外传感器检测模块、主控电路模块、电源模块、电机及驱动模块等部分组成,控制系统的结构框图如图1所示。循迹是指小车在白色地板上循黑线行走,由于黑线和白色地板对光线的反射系数不同,控制芯片根据接收到的反射光的强弱来判断“道路”情况。小车在行驶过程中不断地向地面发射红外光,当红外光遇到白色纸质地板时产生漫反射,反射光被小车上的红外传感器ST188接收;如果遇到黑线则红外光被吸收,小车上的传感器接收不到红外光,单片机以是否接收到反射回来的红外光为依据来确定黑线的位置和小车的行走路线。

图1 循迹小车系统框图Fig.1 Car tracking system block diagram
2 硬件电路
2.1 光电检测模块
1)ST188 红外传感器
红外传感器ST188属于ST系列反射式光电传感器,其在红外检测方面应用非常广泛。这个系列的传感器种类齐全、价格便宜、体积小、使用方便、质量可靠[2]。图2是其实物及结构图,其含一个反射模块(发光二极管)和一个接收模块(光敏三极管)。通过发射红外信号,由接收到的信号变化情况判断检测物体状态的变化。A、K之间是发光二极管,C、E之间是光敏三极管(二者在电路中均正接,但要串联一定阻值的电阻)。
2)光电检测电路

图2 ST188管脚图及实物图Fig.2 ST188 pin diagram and physical map
图3为光电检测电路,其主要有光电模块和比较器构成。红外传感器ST188检测黑线,把接收到的信号送给运放μA741,该信号经电压比较器后,产生电平信号,再输入到单片机中,用以判定是否检测到黑线。测试中,若检测到白色区域,接收管的电压为4.8 V;若检测到黑色区域,接收管的电压为0.5 V;二者均满足测试要求。由μA741构成比较器,其基准电压由30 K的电位器调节,每个传感器的基准电压都有差别,为此我们为每个传感器配备了一个电位器[3]。
3)ST188红外传感器的安装
图4为4个ST188红外探头的具体位置,小车在循迹运行过程中,为了能精确定位黑线位置并确定小车行走的方向,需要同时在底盘装设4个红外ST188探测头,进行两级方向纠正控制,提高其循迹的可靠性。

图3 光电检测电路Fig.3 Photoelectric detection circuit

图4 传感器安装图Fig.4 Sensor installation diagram
2.2 控制器模块
控制器模块采用AT89C51单片机作为主控制器。它是一个低功耗,高性能的8位单片机,具有2个8位可编程定时计数器,4 k的随机存取数据存储器 (RAM),32个I/O口,且可在线编程、调试,方便地实现程序的下载与整机的调试[4-5]。其最小控制系统如图5所示,采用按键复位和外部时钟,晶振频率为12 MHz。
2.3 驱动及电机模块
1)驱动电路

图5 时钟电路和复位电路Fig.5 Clocking circuit and reset circuit
驱动模块采用专用芯片L298N作为电机驱动芯片,L298N是一个具有高电压大电流的全桥驱动芯片,其响应频率高,一片L298N可以控制2个直流电机。表1为L298N功能表。L298N 的5、7、10、12 4个引脚接到单片机上,通过对单片机编程就可实现两个直流电机的PWM调速控制[6],其驱动电路的设计如图6所示。

表1 L298N输入输出关系Tab.1 L298N input output relationship
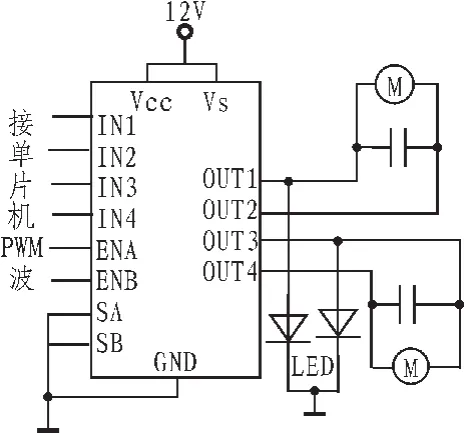
图6 L298N电机驱动电路Fig.6 L298N motor drive circuit
2)电 机
电机采用直流减速电机,其具有转动力矩大、装配简单、重量轻、体积小,使用方便。由于其内部由高速电动机提供原始动力,带动变速(减速)齿轮组,可以产生较大扭力。在此选用减速比为1:74的直流电机,减速后电机的转速为100 r/min。选择车轮直径为6 cm,则小车的最大速度可以达到Vmax=2πrv×3.14×0.03 ×100/60=0.314 m/s。
2.4 系统电源模块
在图7中,220 V市电经220 V/17.5 V变压器降压后得到的±17.5 V交流电压,经过整流滤波后得到±18 V两路电压。其中+18 V经三端稳压器LM7812得到+12 V,再经过LM7805得到+5 V的电压;-18 V经三端稳压器LM7912得到-12 V电压,以作为系统本身的工作电源。
3 系统软件设计
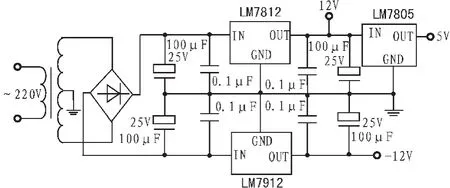
图7 系统电源模块Fig.7 System power supply module
本系统采用PWM来调节直流电机的速度,通过控制51单片机的定时器T0的初值,使单片机的P0.4和P0.5输出口输出不同占空比的方波脉冲,来调节加在电机两端的电压,从而控制电机速度。小车进入寻迹模式后,即开始不停地扫描与红外探测器连接的单片I/O口,一旦检测到某个I/O口有信号变化,就执行相应的判断程序,把相应的信号发送给电动机从而纠正小车的运行状态。小车循迹流程图如图8所示。

图8 小车循迹流程图Fig.8 Car tracking chart
4 系统测试
为了测试智能小车系统的正常运动情况,设计场景对循迹小车系统进行测试。测试轨道距离如图9所示,轨道采用环形的深色轨道。系统测试中,采取顺时针和逆时针两个方向运行的测试方法,以此来检测智能小车左右转的效果。经过在轨道A点、B点顺时针、逆时针各2次,每次2圈的实际测试,测试数据结果如表2所示。
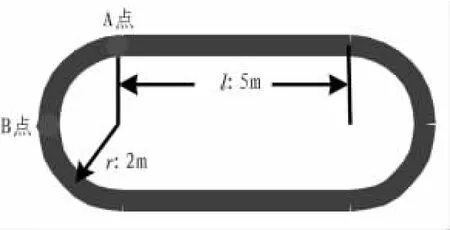
图9 测试场景参数Fig.9 Test scene parameters
5 结束语
文中设计的循迹小车,采用红外传感器ST188为循迹模块、单片机AT89S51为控制模块。小车使用单元模块化的电路设计,使得系统简洁,响应快、性能稳定。经测试表明:小车实现了预期设定的循迹功能,并在规定的按时内,沿设定路径完成循迹功能。为了使小车更加智能化,还可为小车扩展避障、自动识别、自动报警、自动制动、自动保持安全距离、车速检测和巡航控制等功能。
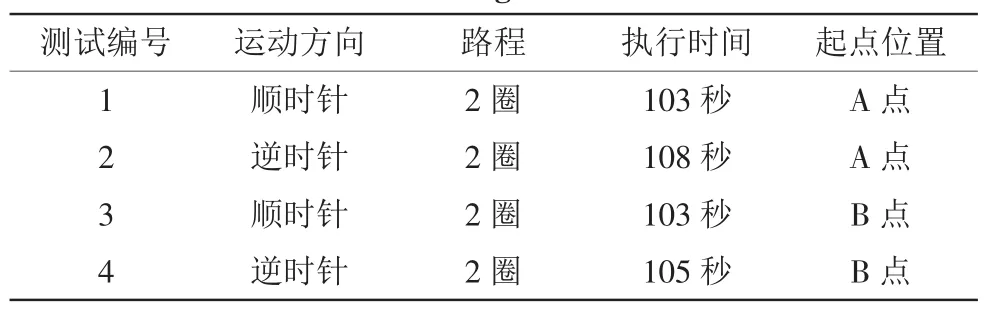
表2 循迹小车测试结果Tab.1 Tracking car test results
[1]宋健,姜军生,赵文亮.基于单片机的直流电动机PWM调速系统[J].农机化研究,2006(1):102-103.
SONG Jian,JIANG Sheng-jun,ZHAO Wen-liang.PWM speed regulator for DC motor based on single chip[J].Journal of Agricultural Mechanization Research,2006(1):102-103.
[2]边春元,李文涛,江杰.C51单片机典型模块设计与应用[M].北京:机械工业出版社,2008.
[3]兰羽,卢庆林.仪表放大器在激光外差玻璃测厚系统中的应用[J].国外电子测量技术,2012,31(3):79-82.
LAN Yu,LU Qing-lin.The use of instrumentation amplifier in glass-thickness measure system using laser heterodyne[J].Foreign Electronic Measurement Technology,2012,31(3):79-82.
[4]兰羽,周茜.超声波测距系统接收电路研究[J].电子设计工程,2012,20(244):81-83.
LAN Yu,ZHOU Qian.Study on the receiving circuit of ultrasonic distance measurement system[J].Electronic Design Engineering,2012,20(244):81-83.
[5]董涛,刘进英,蒋苏.基于单片机的智能小车的设计与制作[J].计算机测量与控制,2009(2):380-382.
DONG Tao,LIU Jin-ying,JIANG Su.Design and manufacture smart car based on single chip[J].Computer Measurement&Control,2009(2):380-382.
[6]鲁庆.基于栅格法的机器人路径规划[J].电脑与信息技术,2007,15(6):24-27.
LU Qing.Research of pathplanning for car-like robot based on grid method[J].Computer and Information Technolog,2007,15(6):24-27.
[7]杨兵,刘伟杰.一种基于可视图的机器人避障路径规划[J].电脑知识与技术,2009(2):434-435.
YANG Bin,LIU Wei-jie.A method based on of robot path planning[J].Computer Knowledge and Technology,2009(2):434-435.
猜你喜欢
湘潭大学自然科学学报(2022年2期)2022-07-28
快乐语文(2020年36期)2021-01-14
少年文艺·我爱写作文(2020年11期)2020-11-23
科学大众(2020年17期)2020-10-27
汽车与驾驶维修(维修版)(2019年4期)2019-05-09
文苑(2018年22期)2018-11-19
电子制作(2018年8期)2018-06-26
饮食与健康·下旬刊(2017年12期)2017-12-06
电子制作(2017年1期)2017-05-17
少年文艺·我爱写作文(2016年9期)2016-05-14
