
基于占空比模糊控制的光伏发电系统MPPT技术
2013-07-13 06:43孙黎霞
电子设计工程 2013年7期
黄 瑞,孙黎霞
(河海大学 能源与电气学院,江苏 南京 210098)
基于占空比模糊控制的光伏发电系统MPPT技术
黄 瑞,孙黎霞
(河海大学 能源与电气学院,江苏 南京 210098)
为了有效地利用太阳能,有必要对光伏发电系统进行最大功率点跟踪(MPPT)控制研究。文中以两级式光伏并网发电系统为研究对象,建立了任意外界环境下的光伏阵列数学模型。由于光伏阵列的非线性输出特性,将模糊控制思想引入最大功率点跟踪,提出占空比模糊控制的扰动观察法的MPPT控制策略,并通过计算机进行仿真验证。与传统的占空比扰动观察法相比较,该方法能够更加快速、准确地跟踪上太阳能电池的最大功率点。
最大功率点跟踪;模糊控制;太阳能;光伏发电系统
太阳能作为一种巨量的可再生能源,是近期急需的能源补充,又是未来能源结构的基础,开发利用太阳能具有重大的战略意义[1]。所有光伏发电系统都希望太阳能光伏阵列在同样日照、温度的条件下尽可能大的输出电能,因此在理论和实践上提出了太阳能光伏阵列的最大功率点跟踪(MPPT)问题。
目前实现MPPT的方法有恒定电压(CVT)法,扰动观察(P&O)法及增量电导(INC)法等[4]。文中研究光伏发电系统中的MPPT问题,基于模糊控制理论,即利用模糊集合的基本概念和连续隶属度函数的理论,提出了占空比模糊控制干扰观察法。通过MATLAB/Simulink建模仿真,实现在任意外界环境下最大功率点的跟踪,并与非模糊控制的占空比干扰观察法相比较,结果表明该方法在快速性和稳定性方面取得了更好的效果。
1 光伏电池的数学建模
光伏电池模型通常要求仅采用厂家提供标准条件(光照强度Sref=1 000 W/m2,电池温度 Tref=25℃)下的光伏电池板测试参数 Isc、Uoc、Im、Um,并且要在满足工程精度的情况下尽可能地简化模型。
简化的光伏电池的数学模型为:

式中,Isc为标准条件下光伏电池的短路电流;Uoc为标准条件下光伏电池的开路电压;Im为标准条件下光伏电池的最大功率点电流;Um为标准条件下光伏电池的最大功率点电压。因此,只要知道这4个参数,就可以得到在标准条件下的光伏电池I-V特性曲线。

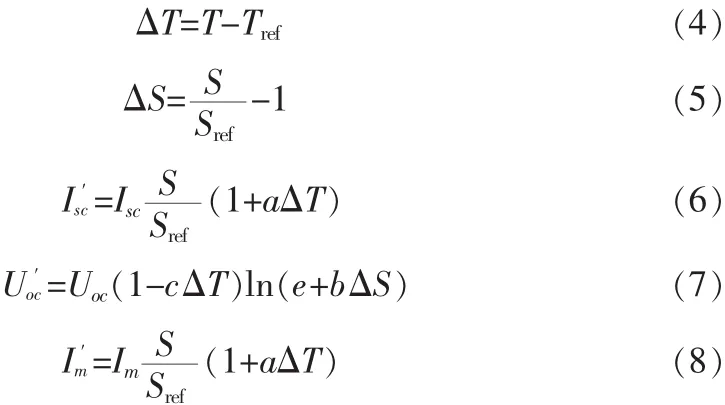

式中,参数a、b、c的典型值为:

2 占空比模糊控制实现MPPT
2.1 算法原理
基于占空比扰动观察法原理,目标量为:光伏阵列的输出功率P;控制量为:Boost电路的占空比D。
根据功率值变化量 ΔP(n)=P(n)-P(n-1)和 n-1 时刻的占空比调整步长ΔD(n-1),决定当前时刻的调整步长大小ΔD(n)。光伏发电系统的模糊控制原理图如图1所示。

图1 光伏发电系统的模糊控制原理图Fig.1 Schematic diagram of fuzzy control in photovoltaic power generation system
图1中,输入ΔP(n)表示第n时刻与前一时刻输出功率差的实际值,Δp(n)表示 ΔP(n)对应于模糊集论域中的值;输入ΔD (n-1)表示第n-1时刻占空比D调整步长的实际值,Δd(n-1)表示 ΔD(n-1)对应于模糊集论域中的值。 输出 ΔD(n)表示第 n时刻占空比D调整步长的实际值,Δd(n)表示ΔD(n)对应于模糊集论域中的值;D(n-1)表示第 n-1时刻占空比的实际值,D(n)表示第n时刻占空比的实际值,e-Ts为一个单位延迟环节,Ke、Ka分别表示功率差和调整步长的量化因子。
在每一次寻优周期开始时,采样当前时刻的输出功率值 P(n)和前一时刻调整步长 ΔD(n-1),计算当前时刻 P(n)和前一时刻 P(n-1)的差值 ΔP(n),并对 ΔP(n)和 ΔD(n-1)进行量化,得到模糊集论域中的变量 Δp(n)和 Δd(n-1),将其作为模糊控制器的输入,通过模糊推理得到当前时刻的调整步长Δd(n),经重心法反模糊化后,得到控制量占空比调整步长ΔD(n)的实际值,再与当前时刻的占空比D(n-1)相加得到下一时刻的占空比D(n),调整光伏阵列的输出电压和功率,然后就进入下一次的寻优周期。不断重复上述过程,直到输出功率差ΔP(n)达到精度要求,即,到达了光伏系统的最大功率点。
2.2 算法实现
2.2.1 确定输入和输出变量的模糊子集及论域
将语言变量分别定义为8个和6个模糊子集[6],即Δp={NB,NM,NS,NO,PO,PS,PM,PB};Δd={NB,NM,NS,PS,PM,PB}。 其中:NB,NM,NS,NO,PO,PS,PM,PB 分别表示负大,负中,负小,负零,正零,正小,正中,正大等模糊概念。并将论域规定为 13 个等级,即:Δp={-6,-5,-4,-3,-2,-1,0,+1,+2,+3,+4,+5,+6};Δd={-6,-5,-4,-3,-2,-1,0,+1,+2,+3,+4,+5,+6}。
2.2.2 确定隶属函数
选择常用的三角形隶属函数,占空比调整步长Δd和功率差Δp的隶属度函数分别如图2所示。
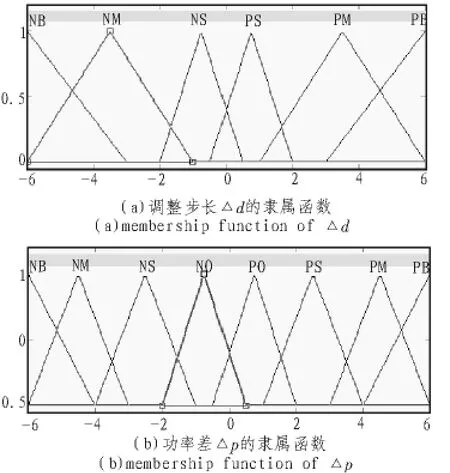
图2 调整步长Δd和功率差Δp的隶属函数Fig.2 Membership function of Δd and Δp
2.2.3 模糊决策表
根据占空比扰动观察法的原理,当前时刻的占空比调整步长ΔD(n)是由功率差ΔP和前一时刻的占空比调整步长ΔD(n-1)的变化量决定的。依据光伏阵列P-V特性曲线的分析,并考虑外界环境因素对光伏阵列输出特性的影响,得到以下调整占空比步长ΔD(n-1)的原则:
1)如果输出功率增加了,则继续按原来步长方向调整,否则,向相反方向调整;
2)在最大功率点附近时,采用较小的调整步长,减少跟踪时的功率损失;离最大功率点较远时,采用较大的调整步长,以加快跟踪速度。
3)当温度和光照强度等外界因素突然变化使得光伏阵列的输出功率发生较大变化时,系统能迅速地作出反应。
遵循上述原则,应用If A and B then C的模糊规则,模糊规则表如表1所示。

表1 MPPT模糊控制规则表Tab.1 MPPT fuzzy control rules
2.2.4 反糊方法
在模糊控制编辑器中,模糊推理采用成熟且容易成功实现的 Mamdani推理法,“交”方法为 min,“并”方法为 max,推理方法为min,聚类方法为max,反模糊方法选择具有较高精度的重心法[7],如图3所示。
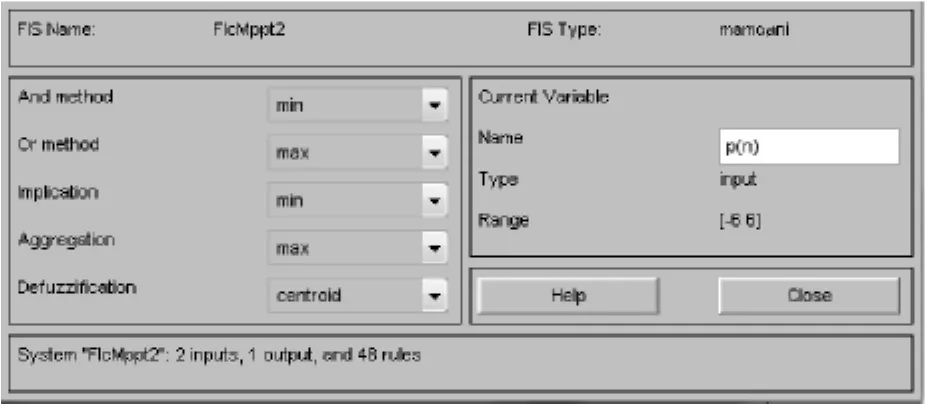
图3 模糊控制器属性编辑界面Fig.3 Attribute edit interface of fuzzy controller
3 仿真分析
外界环境条件为:光照强度S=1 000 W/m2,环境温度T=25 ℃。 负载阻值 R=50 Ω。 量化因子:Ka=0.005,Ke=2.0。 采用固定步长为0.001,仿真器设置为ode3,运行时间为1 s。得到功率P和占空比D变化波形如图4所示。
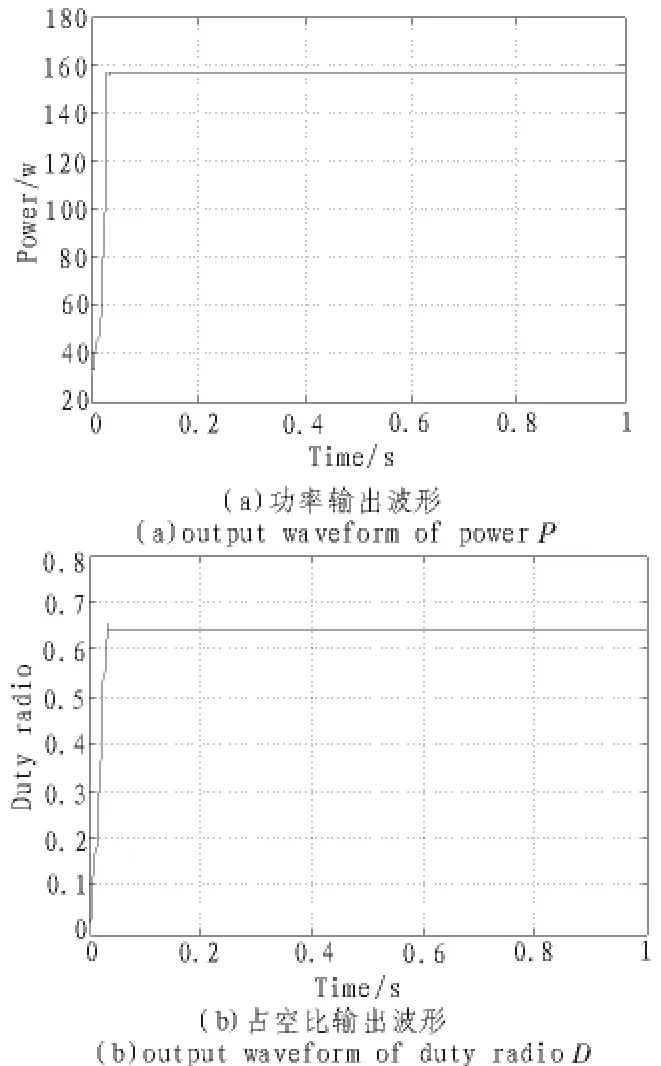
图4 仿真输出波形图Fig.4 Output waveform of power P and duty ratio D
从图 4(a)的输出功率仿真波形可以得知:在Pm=157.3 W,Dm=0.638,t=0.039 s左右,光伏阵列就工作在最大功率点,实现了最大功率点跟踪,并且功率波形平衡光滑,几乎没有振荡。仿真结果表明了模糊控制方法可以使光伏系统快速平稳地跟踪到最大功率点。
模拟外界环境变化,光照强度在1 s时由800 W/m2变为1 000 W/m2,环境温度在2 s时由25℃变为0℃,仿真时间为3 s,其他仿真参数设置不变,仿真得到的功率和占空比波形如图5所示;图6为相同外界条件下,非模糊控制占空比扰动观察法功率和占空比的输出波形。
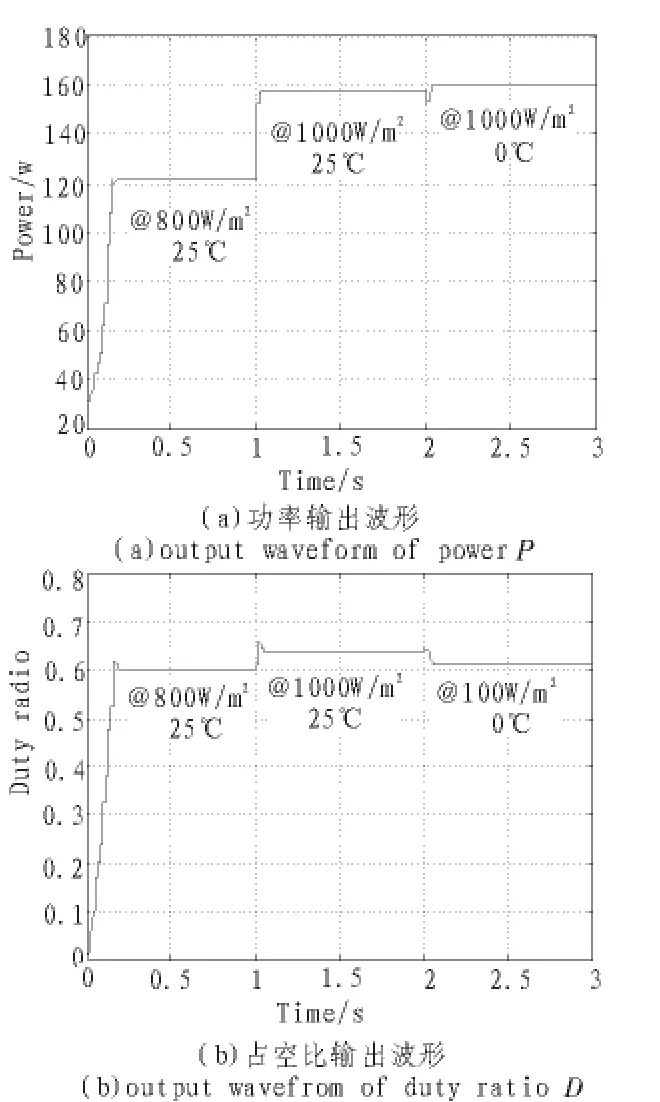
图5 模糊控制仿真输出波形Fig.5 Output waveforms using fuzzy control
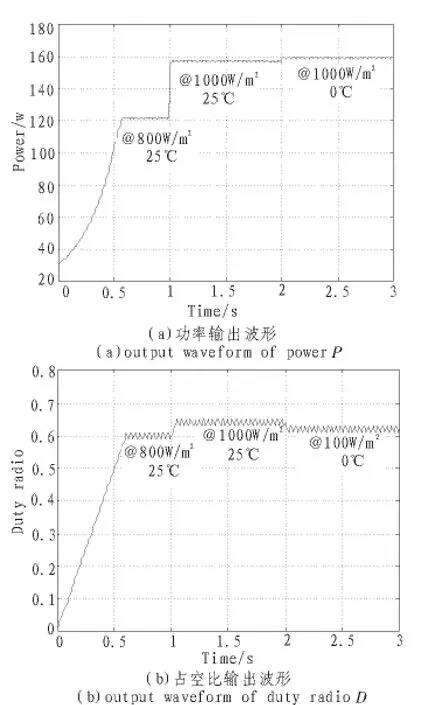
图6 非模糊控制仿真输出波形Fig.6 Output waveforms without fuzzy control
由图5和图6可以看出,当光照强度为1 000 W/m2,环境温度为25℃时,采用模糊控制法,系统在0.18 s就跟踪上了最大功率点,达到了稳定,而采用非模糊控制,系统在0.55 s才跟踪上最大功率点;当外界环境发生变化时,模糊控制法能够快速跟踪到新的最大功率点,波形到达稳态,没有剧烈振荡,而非模糊控制法达到稳定时出现了剧烈的振荡。通过比较可以得出采用模糊控制的干扰观察法可以获得更好的性能。
4 结 论
鉴于光伏电池的非线性特性,针对光伏发电系统MPPT问题提出了将模糊控制思想应用到最大功率跟踪的控制中,建立了一种基于扰动观察法的模糊控制策略的模型,该模型不需要精确的内部电路特性和相关参数,就可以实现光伏阵列的最大功率点跟踪,通过仿真验证了该控制算法在快速性和稳定性方面具有更优的控制性能。
[1]赵争鸣,刘建政,孙晓瑛,等.太阳能光伏发电及其应用[M].北京:科学出版社,2005.
[2]Rodriguez C,Amaratunga G A J.Analytic solution to the photovoltaicmaximum powerpointproblem [J].IEEE Transactions on Circuits and Systems-I,2007,54 (9):2054-2060.
[3]Femia N,Petrone G,Spagnuolo G,et al.Optimization of perturb and observe maximum power point tracking method[J].PowerElectronics,IEEETransactionson,2005,20(4):963-973.
[4]黄克亚.光伏发电系统最大功率点跟踪算法研究及实现[D].苏州:苏州大学,2010.
[5]张玉平,石新春,陈雷.光伏系统最大功率跟踪控制的仿真研究[J].灯与照明,2008,32(4):51-55.
ZHANG Yu-ping,SHI Xin-chun,CHEN Lei.The simulation study of PV system maximum power point tracking control[J].Light and Lighting,2008,32(4):51-55.
[6]焦阳,宋强,刘文华.光伏电池实用仿真模型及光伏发电系统仿真[J].电网技术,2010,34(11):198-202.
JIAO Yang,SONG Qiang,LIU Wen-hua.Practical simulation model of photovoltaic cells and photovoltaic power generation system simulation[J].Power System Technology,2010,34(11):198-202.
[7]石辛民,郝整清.模糊控制及其MATLAB仿真[M].北京:清华大学出版社,2008.
Study on the MPPT approaches in photovoltaic system based on fuzzy control
HUANG Rui,SUN Li-xia
(College of Energy and Electrical Engineering, Hohai University, Nanjing 210098, China)
In order to utilize solar energy effectively,it is necessary to study on Maximum Power Point Tracking (MPPT) in photovoltaic power generation system.In this paper,double-stage photovoltaic power generation system is studied and the mathematical model of photovoltaic array is established under any arbitrary environment.Due to the nonlinear output characteristic of photovoltaic array,fuzzy control is introduced to realize MPPT.It is presented perturb and observe (P&O)of duty cycle for fuzzy control in MPPT control strategy.The simulation is carried out based on the proposed algorithm.Compared with the conventional duty cycle of P&O method,it can track the maximum power point quickly and accurately
MPPT; fuzzy control; solar energy; photovoltaic power generation system
Tk513.4
A
1674-6236(2013)07-0101-04
2012-11-13稿件编号201211094
自然科学基金重点项目(51137002);江苏省基金项目(BK2011026)
黄 瑞(1986—),女,江苏邳州人,硕士研究生。研究方向:光伏发电技术。
猜你喜欢
汽车实用技术(2022年5期)2022-04-02
成都信息工程大学学报(2021年5期)2021-12-30
河北理科教学研究(2020年2期)2020-09-11
作文成功之路·小学版(2020年1期)2020-03-03
新校长(2018年7期)2018-07-23
西南交通大学学报(2016年3期)2016-06-15
电子制作(2016年21期)2016-05-17
通信电源技术(2016年5期)2016-03-22
北京航空航天大学学报(2016年12期)2016-02-27
西北工业大学学报(2015年1期)2016-01-19
