基于多彩色CCD图像处理的浮冰测量研究
2013-07-06 13:03夏丽娟
黑龙江大学工程学报 2013年1期
韩 雷,夏丽娟,郑 钧
(1.黑龙江省水利科学研究院,哈尔滨 150080;2.北京尚水信息技术股份有限公司,北京 100085)
0 引 言
近几年,冬季渤海及黄海北部遭受了比较严重的海冰灾害,直接对沿海地区社会、经济产生严重的影响,造成巨大损失。渤海和黄海海域的海冰在冻结和融化过程中,会引起海况的变化,随着风、海流而漂移形成浮冰,浮冰的运动给通航和海洋工程结构的正常作业产生了巨大影响。因此,对于浮冰运动的测量实验研究是十分有意义的。
目前国内对于浮冰破坏方式和作用现象处于模拟实验的研究阶段,实验研究的关键点是测量浮冰的运动速度、面积等物理参数。程一轩[1]使用模型冰进行浮冰模拟实验,利用CCD摄像机抓取运动图像,分析计算得到模型冰的运动速度和面积,但在计算浮冰速度与面积的算法上还可以优化。浮冰的运动可以看作是大范围流场中的颗粒运动,王兴奎[2]、禹明忠[3]等在河工模型测量流场试验中,基于图像处理和PTV技术,采用摄像方式记录颗粒运动轨迹,经过图像处理计算得出大范围表面流场。
本文采用多彩色CCD摄像技术,并结合图像处理和PTV技术建立模型试验的浮冰运动测量系统,实现了对浮冰的物理形状、运动速度等信息进行提取,为浮冰运动的进一步研究提供可行的测试方法及可靠的数据支持。
1 系统结构组成
本系统主要由硬件、软件两部分组成。如图1所示,即通过多彩色CCD摄像设备拍摄视频数据,通过视频采集卡,将视频数据传输到主机,并由主机软件系统对该图像数据进行图像处理与PTV计算,从而获得浮冰运动的物理参数及跟踪轨迹。

图1 系统结构图Fig.1 Structure of system
为测量一定水域的浮冰运动情况,架设多个CCD同步采集。在模型试验中,根据模型大小及CCD设备固定在一定高度下的拍摄范围,确定采用摄像机的个数,从而保证摄像范围覆盖到所有研究区域。本系统中采用的多路视频采集卡,实现多路同步采集。为实现浮冰运动的精确跟踪,对浮冰表面进行着色,以提供检测的特征值。软件系统主要对采集的数据进行图像处理与PTV计算,获得浮冰形状及运动参数。
2 浮冰运动测量原理
2.1 浮冰形状提取及参数计算
2.1.1 浮冰形状提取
采用图像处理方式获得图像中浮冰的边缘坐标,并按一定的次序保存。通常将浮冰的坐标按逆时针方向保存,用于精确的计算浮冰的面积。具体处理流程见图2。

图2 浮冰轮廓提取流程图Fig.2 Flowchart of the floating ice contour extraction
根据摄像机的不同,原始采集的图像数据需要进行不同程度的转换。如果采用彩色摄像机,则需要对图像进行灰度的转换,转换为8位的bmp格式灰度图。通过阈值化处理,将图像分成目标和背景两个领域,根据指定的一个阈值,如果图像中某像素的灰度值小于该阈值,则设置为0,否则设置为255。阈值设置的合适程度,直接影响后续轮廓提取的难易。通过腐蚀和膨胀,可以消除一些无意义的物体,提高图像的处理速度,多次的腐蚀与膨胀,可以去除伪浮冰。
物体的边缘是由灰度不连续性所反映的,经典的边缘提取利用边缘邻近一阶或二阶方向导数变化规律获取。本系统采用Sobel算子进行图像的边缘检测[4],即图像中的每一个点都是图3中的两个模版的卷积,两个模版中一个对应像素点横向的梯度Gx,一个对应像素点纵向的梯度Gy,根据式(1)可以求得像素点的梯度,从而判断图像中是否有边缘以及边缘的位置。


图3 Sobel算子Fig.3 Sobel operators
二值图像轮廓跟踪用于提取二值图像中的目标区域,获得图像的外部轮廓特征。系统中采用链码方式获得图像轮廓。选择8-链码编码方法,首先按照从左至右,从上至下的顺序查找轮廓起点;再按照右、右下、下、左下的顺序查找第二个轮廓点;然后按照右、右下、下、左下、左、左上、上、右上的顺序查找其它轮廓点,直到找到轮廓起点为止。
对于图像中多块浮冰情况,逐一确定各个浮冰边缘中的一点,作为图像轮廓跟踪起始点。循环查询起点位置,逐个对图像轮廓进行跟踪并保存其像素坐标。
2.1.2 浮冰物理参数计算
浮冰物理参数计算主要计算浮冰中心坐标、长轴、短轴和浮冰面积。
中心点坐标的计算采用已保存的各个浮冰的轮廓坐标,分别对x和y方向坐标累加再求平均的方式获得各个浮冰的中心点坐标。通过计算浮冰的任意两点的轮廓坐标之间的距离,选择最大距离作为该浮冰的长轴,与长轴垂直且两点距离最短的作为该浮冰的短轴。
浮冰面积利用矢量积推导的任意多边形面积公式获得。将浮冰视作任意多边形,浮冰的轮廓坐标作为多边形顶点坐标,利用式(2)即可获得浮冰面积:

其中S代表m多边形的面积;x,y分别为多边形顶点坐标。
2.2 浮冰运动速度测量
粒子跟踪测速PTV是一种瞬态全场速度测量的方法,直接跟踪流场中的示踪粒子的运动,避免了粒子图像测速PIV方法的平均效应,具有准确、直观的特点[3]。
PTV基本算法是,首先获取连续两帧粒子图像,时间间隔Δt一定且足够短,且被测速流体的运动速度在时间和空间上都没有剧烈突变,通过识别第一帧图像(t时刻)上每个粒子在第二帧图像(Δt+t时刻)上的位置,计算两帧图像中各粒子与其配对粒子的形心坐标,计算粒子的运动位移ΔL,假设图像放大率为M,则粒子的速度可以通过式(3)求得:

因此PTV算法的关键问题是如何对两帧图像中的粒子进行正确的匹配。系统中采用基于粒径配对度和形变配对度的PTV算法。根据粒子在两帧图像中的最大位移作搜索半径,以第一帧图像中粒子的坐标为圆心,在第二帧图像中作圆,通过粒径配对度(Dp)计算筛选候选粒子,即:

式中dA为待配对粒子粒径;dB为配对候选粒子粒径。若设定粒径配对阈值为T,而搜索区域中配对候选粒子与待配对粒子的Dp≥T,则该配对候选粒子保留候选身份[6]。
3 浮冰运动模拟验证
浮冰初步试验在长为1.1m,宽0.4m的黑色背景的自动传送带上完成,摄像机安装在距离传送带面0.33m的高度上,见图4。
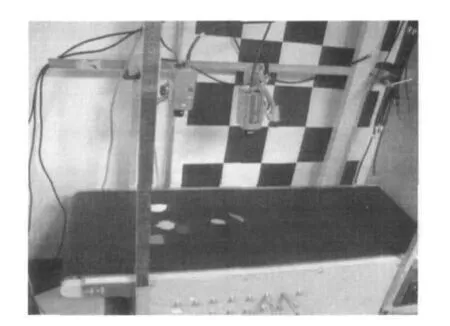
图4 试验环境Fig.4 Experiment environments
采用多块大小形状颜色不一的纸片模拟浮冰,手动控制传送带的运动方向,从而使浮冰按照拟定的方向运行。在浮冰运动的过程中,获取摄像范围内浮冰的轮廓线,并根据其轮廓线的位置坐标,计算各浮冰的长轴、短轴和中心点坐标等物理参数。浮冰的中心点视作粒子,计算浮冰运动的速度大小及方向。
图5为浮冰运动图像处理过程。

图5 浮冰运动图像处理过程Fig.5 Image processing of floating ice motion
4 结果验证
根据上述介绍的实验方式进行实验。试验之前需进行系统标定步骤,即对摄像机进行畸变校正与原型坐标转换。系统采集图像通过图像处理获得浮冰参数均为像素坐标,通过系统标定系数转换,将像素坐标转换为实际的原型坐标及浮冰实际物理参数。采用精度为0.02mm的标表卡尺对浮冰进行测量,获取其准确的物理参数,用于与本系统计算的参数进行对比。表1列出图5中着色为红色的浮冰的物理参数的对比情况。由于面积算法的优化,与之前采用最大外接矩形获得面积方式[5]所计算的面积误差率明显降低。

表1 浮冰物理参数对比Table1 Comparison of the physical parameter of floating ice
5 结 论
本文开发了一种基于多彩色CCD图像处理的浮冰测量系统,实现了对浮冰运动进行测量的模拟检测。通过对采集的浮冰图像进行数字图像处理,可以获得浮冰轮廓精确的像素位置;通过提取的浮冰轮廓可计算浮冰的中心点坐标、长轴、短轴、面积等物理参数;利用PTV技术,将浮冰中心点看作待测粒子,可以计算出浮冰的运动流速。
本系统在浮冰的跟踪中仍存在不足,比如采用颜色作为特征值导致试验浮冰个数受到限制;如果浮冰形状相似度很大时,系统将很难保证对其进行准确分辨等,这些尚需在今后的工作中逐渐完善。
[1]程一轩,贾 青,王国玉,等.浮冰对码头结构撞击作用力的物理模拟方法 [J].水利测量技术,2008,(6):9.
[2]王兴奎,庞东明,王桂仙,等.图像处理技术在河工模型试验流场量测中的应用 [J].泥沙研究,1996,(4):21-26.
[3]禹明忠.PTV技术和颗粒三维运动规律的研究 [D].北京:清华大学,2002.
[4]何 斌,马天予,王运坚.Visual C++ 数字图像处理 [M].北京:人民邮电出版社,2002.
[5]夏丽娟,任明轩,郑 钧.基于图像处理和PTV技术的浮冰运动检测系统 [A].水利测量技术论文选集:第七集 [C].郑州:黄河水利出版社,2010.
[6]胡永亭,邵建斌,陈 刚.几种PTV算法的比较研究[A].第二十一届全国水动力学研讨会暨第八届全国水动力学学术会议暨两岸船舶与海洋工程水动力学研讨会文集 [C].北京:海洋出版社,2008.
猜你喜欢
疯狂英语·新阅版(2021年6期)2021-07-19
装备制造技术(2020年1期)2020-12-25
制造技术与机床(2019年11期)2019-12-04
制造技术与机床(2018年12期)2018-12-23
电子制作(2018年18期)2018-11-14
少儿科学周刊·少年版(2018年12期)2018-01-26
中国交通信息化(2017年4期)2017-06-06
水利科技与经济(2016年5期)2016-04-22
电气化铁道(2016年4期)2016-04-16
河南科技(2014年1期)2014-02-27