
基于CAN总线的多路避暗视频分析系统设计
2013-07-05 15:33陈得宝王江涛
淮北师范大学学报(自然科学版) 2013年4期
魏 华,陈得宝,王江涛
(淮北师范大学 物理与电子信息学院,安徽 淮北 235000)
基于CAN总线的多路避暗视频分析系统设计
魏 华,陈得宝,王江涛
(淮北师范大学 物理与电子信息学院,安徽 淮北 235000)
为提高对动物行为的检测精度和效率,采用CAN(控制器区域网)总线技术,设计一种新的避暗视频分析系统.本系统采用多路脉冲控制技术,设计数字可调脉冲刺激器,对暗区中的动物进行刺激,实现刺激无死区,将图像处理技术应用于对动物行为的检测和跟踪,自动提取动物行为指标和参数.设计CAN总线,实现下位各处理器间的信息传递,系统具有良好扩展性.利用蓝牙技术实现上下位机的通信,减少人为因素对实验的干扰.
避暗系统;图像处理;CAN总线;蓝牙
避暗实验[1]的基本思想是利用鼠类的趋暗性,首先将老鼠放在明箱中,一旦进入暗箱,对暗箱给电刺激,使老鼠逃避刺激,再回到明箱,反复实验,以测量老鼠的记忆能力和特性.
设计避暗测控系统的主要技术是信号检测和对动物行为的跟踪,即怎样正确地检测老鼠是在明箱还是在暗箱,以及在各箱中的活动情况[2].到目前为止,避暗系统大致有以下几类,最传统的方法是用人眼观测,利用秒表或其它计时设备进行计时,利用手动开关进行通电,电刺激采用正负极固定的电极实现.这种方法工作量大,而且得到的数据准确性不高,对同一动物的行为,不同的人可能观测得到不同的实验结果.第二代产品是利用透射式红外发射器和接收器来检测信号,当红外发射和接收器间有老鼠通过时,红外接收端的信号发生跳变,利用这一跳变信号判断老鼠处在哪个区域,通常用一对红外发射接收管作为信号检测的主要设备,识别率不高,特别是老鼠进入暗区马上又退回时,效果更差.第三代产品是选用反射式红外反射和接收器,将它们安装在明箱和暗箱相连的过孔处,在单片机的控制下完成信号检测,准确率有很大提高,但由于其对几种异常干扰不能处理,识别的准确率受一定条件影响.第四代产品主要借助图像处理技术、视频跟踪技术、多媒体技术等实现对动物行为的跟踪和指标的计算[3-5],该技术具备高度智能化、信息含量大、视频录像可以无损保存的优点,与采用硬件传感器的方法相比,灵活性和精确性均有很大的提高,这为广大科研工作者提供了更快捷、可靠的实验工具,也推动动物行为学、药理学等相关学科的发展.
本设计在对现有避暗系统研究的基础上,利用自行研制的数字恒流电压可调式脉冲刺激器对暗区中的动物进行刺激,根据用户的要求,刺激电流和电压实时可调.由于使用多路脉冲刺激方式,避免传统刺激方法中死区现象的发生,而且电栅在外界造成短路时,实验效果不受影响.除此之外,本文设计的系统采用图像处理技术,实时跟踪和计算动物行为的多项指标,利用数据库技术保存实验结果以供用户随时查看和调用,系统除能在线分析外,还能离线分析动物活动视频.
1 系统的硬件设计
本系统的硬件包含PC机、摄像头、图像采集模块、单片机、蓝牙模块、刺激器、CAN总线控制器、电栅等部件.
1.1 系统的总体结构
本文设计的避暗系统的总体结构如图1所示.

图1 系统的总体结构
图1包含该系统的两大模块,上位机模块和下位机模块,其中上位机模块实现图像的读取、视频分析、数据存取及其与下位机的通信.上位机模块的工作过程如下:PC机通过图像采集设备读取各箱视频信息,判断动物所在区位,根据动物的所处位置,计算动物行为的各项指标,并绘制动物运动轨迹曲线图,如果某个实验箱中的动物处于暗区,则通过蓝牙模块给下位机模块发送刺激信号,给该箱暗区电刺激,反复循环检测,直到实验时间到达为止.下位机模块的工作过程如下:下位主控单片机采用中断方式接收上位机模块从蓝牙模块发来的启动信息,通过CAN总线将启动信号发送给相应的从单片机,从单片机接收到信号后,向刺激器发送8路脉冲命令,启动电刺激模块,这时电栅上就呈现8路脉冲式电压.由于采用电流刺激,不同电阻的动物身上将承受不同的电压,这避免电压刺激时,动物脚底角质层的增厚而反应迟钝.
1.2 CAN总线设计
CAN-bus(Controller Area Network)即控制器局域网,是国际上应用最广泛的现场总线之一,起先CAN-bus被设计作为汽车环境中的微控制器通讯,在车载各电子控制装置ECU之间交换信息,形成汽车电子控制网络.CAN-bus是一种多主方式的串行通讯总线基本设计规范,有高的位速率,高抗电磁干扰性,而且能够检测出产生的任何错误.当信号传输距离达到10 km时,CAN-bus仍可提供高达5 Kbps的数据传输速率[6].
本文在下位机模块采用CAN总线实现主单片机与各从单片机间信息的交换,采用高速CAN收发器TJA1050实现数据的接收和发送,其最高速度可达1 M波特.除此之外,采用这种收发器,系统还具有低电磁辐射和抗干扰性强的特点.本系统CAN总线电路如图2所示.图2中,单片机可通过串口从PC机收发数据,再通过MCP2515将数据发送到TJA1050高速CAN收发器,或通过高速收发器从CAN总线上接收数据.系统下位机模块中每个通道通信都采用CAN总线方式,有利于系统的扩展.

图2 CAN总线电路
1.3 可调式恒流恒压电刺激器构造原理
传统的避暗系统中,刺激器的输出常采用正负极相并联的方法,如图3所示,所有电栅的正极并联,负极也并联,这种方法有两个明显的缺点,一是当动物前后爪正好落在相间的两个电栅上时(如图3中1,3电栅),将不受电刺激,导致实验失败.二是如果动物粪便落在电栅上,容易导致短路,同样使实验失败.
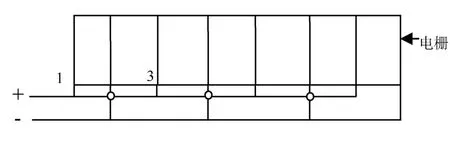
图3 正负极分别并联电栅
为改善电栅的性能,本文设计多路脉冲式刺激器,电栅构造如图4所示.
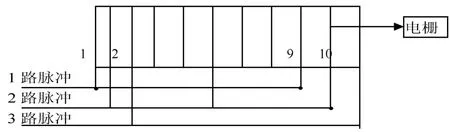
图4 脉冲式电栅结构
由图4可看出,其电栅间的接法是1接9,2接10,以此类推,每根电栅上的刺激频率相同,相位各异,如图5所示(以第1路和第2路脉冲为例说明).

图5 电刺激脉冲波形
这样在相邻或相隔的8根电栅内的任意两根上都不出现相同的信号,由于在避暗实验中,动物一般的前后脚间长度不会达到第1根与第9根的距离,保证刺激的可靠性.为实现电流电压的数字可调,本文采用图6所示的原理构成数字式恒流脉冲刺激器.
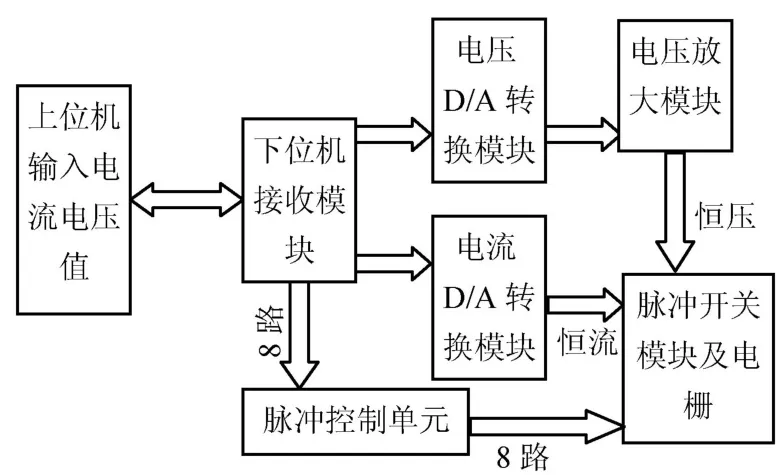
图6 刺激电路构成原理
图6中,下位机接收模块首先从上位机模块接收本次实验所要的电流电压值,将其转换为相应的数字量,分别从单片机的两个不同端口发送给D/A转换模块,考虑性价比,本系统选用DAC0832作为数字量到模拟量的转换芯片,其精度为8位,电流的步进位0.02 mA,电压的步进位0.6 V.芯片工作的参考电压为5 V,数字量计算公式如下:
若当前待转化的模拟量为x,则转换后的数字量Y=(255/5)x.本系统中电压放大模块采用PA84高压放大器构成,其放大倍数固定为30 V,供电电压为120-140 V直流可调,电流最大值限制为4 mA,这样保证动物的安全性.
2 系统的软件设计
系统软件分上位机软件和下位机软件,流程图如图7a,b所示.

图7 软件流程
系统启动后,首先进行参数的设置,根据图像的情况设置明箱和暗箱的边界,以避免误判的发生.在每次实验时,都要保存当前的录像和运动轨迹,保存图像处理分析得到的动物行为指标.
3 实际系统结构
系统的完整结构如图8所示,图8a为某客户实验室现场图,b为软件界面,c为某次实验所得数据,d为某实验动物运动轨迹图.由于每只动物都有运动轨迹图,在此仅给出一只老鼠的运动轨迹图.系统所得动物活动指标有:明箱活动时间、暗箱活动时间、穿梭次数、错误次数、潜伏期、明箱活动路程、暗箱活动路程、错误次数周期、平均错误时间.
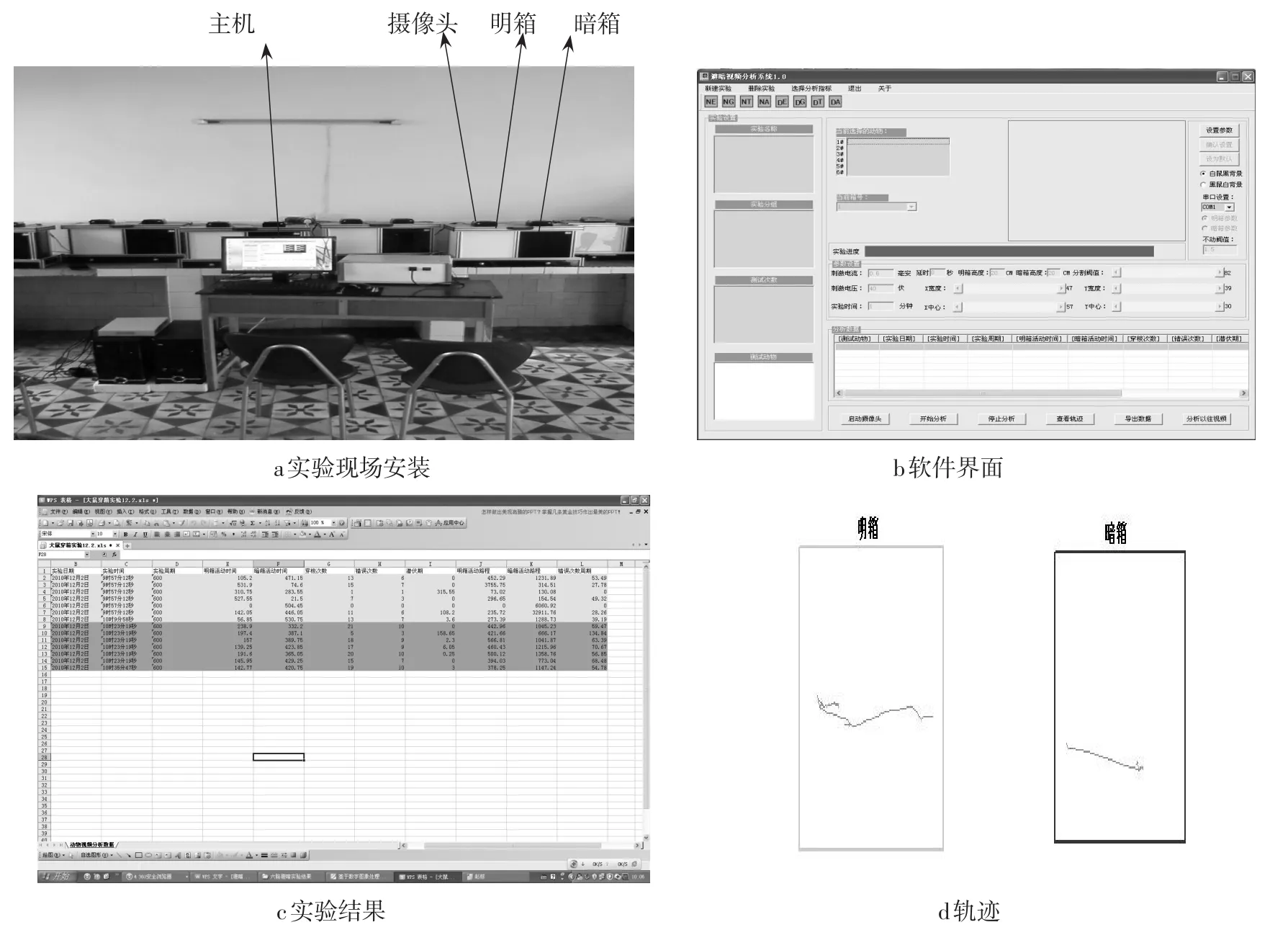
图8 实验结果
本系统可根据实验人员的需要,独立设置单通道或多通道实验,可单独设置单次实验或重复实验,最多可扩展110个通道.通过和客户一年多的实践,表明此系统具有自动化程度高、识别准确率高、抗扰能力强等优点,为药理学、动物行为学的研究提供了有力的支持.
4 结论
本文设计一种多路动物视频避暗分析系统,采用蓝牙技术实现上下位机的通信,利用CAN总线技术实现下位机各处理器间的信息交换,系统具有良好的可扩展性.采用可调式恒流恒压脉冲刺激方式,避免刺激死区现象的发生.利用图像处理技术对动物行为进行准确识别和跟踪,为医药学研究提供一种有效的系统.
[1]张均田.现代药理实验方法[M].北京:北京医科大学中国协和医科大学联合出版社,1998.
[2]LIU X,RUBIO R,QIONG W,et al.Aqueous extract of black maca(Lepidium meyenii)on memory impairment induced by ovariectomy in mice[J].Evidence-Based Complementary and Alternative Medicine,2011,253958:7.
[3]薛丹,陈善广,徐淑萍,等.构建自动、智能及敏感度高的避暗实验检测系统[J].中国组织工程研究与临床康复,2010,14(15):2778-2782.
[4]宋见惠,魏宁,胡健波,等.大鼠性偏爱及性行为视频跟踪系统的建立[J].中国行为医学科学,2006,15(10):941-943.
[5]张敏,张恒义,郑筱祥.基于轮廓曲率和谱系聚类的大鼠体态自动识别[J].浙江大学学报:工学版,2006,40(3):524-527.
[6]张海波,张自嘉.基于CAN总线的嵌入式气象仪器转换器设计[J].传感器与微系统,2013,32(4):132-135.
The Design of Multi-step Through Video Analysis System
WEI Hua,CHEN De-bao,WANG Jiang-tao
(School of Physics and Electronic Information,Huaibei Normal University,235000,Huaibei,Anhui,China)
To improve the testing precision and efficiency for tracking behavior of animals,a new stepthrough system is designed using CAN bus.In the system,the animal in the dark domain is stimulated by a digital adjustable plus stimulator.There is no dead zone for stimulation in the system.Moreover,image pro⁃cessing technology is used to test and track the action of the animal,and a series of parameters and indexes for action of animals are extracted.In addition,CAN bus is designed to realize the information exchanged among different processors in lower computer,and the good expandability of the system is guaranteed.To de⁃crease interference of human factor on the animals,blue tooth technology is utilized to realize the communica⁃tion between the upper computer and lower computer.
step-through system;image processing;CAN bus;blue tooth
TP 23
A
2095-0691(2013)04-0039-06
2013-06-25
淮北市科技人才培育基金计划(20110304)
魏 华(1974- ),女,安徽淮北人,实验师,研究方向:计算机应用.
猜你喜欢
电子制作(2019年7期)2019-04-25
科技创新导报(2019年29期)2019-03-16
科技与创新(2018年1期)2018-12-23
测控技术(2018年6期)2018-11-25
测控技术(2018年8期)2018-11-25
首都食品与医药(2017年1期)2017-10-26
现代工业经济和信息化(2016年2期)2016-05-17
北京纪事(2016年5期)2016-05-07
实用手外科杂志(2015年1期)2015-08-27
空间控制技术与应用(2015年2期)2015-06-05
