
古遗址三维虚拟展示技术研究
2013-06-14 06:56刘军
渭南师范学院学报 2013年2期
刘 军
(1.渭南师范学院 数学与信息科学学院,陕西 渭南714000;2.西北大学可视化技术研究所,西安710027)
0 引言
古遗址场景的真实感建模是文化遗产数字化保护领域一项新的研究内容,涉及到计算机图形学、虚拟现实、时空数据库等多个领域的理论、方法和技术,是信息技术支撑文化遗产保护、修缮和展示的重要方式.要在世界范围内传播并提升古遗址的文化、艺术和旅游价值,急需具有真实感的数字化三维虚拟展示技术[1].
在文化遗址的三维虚拟展示研究方面,美国、日本、意大利等国家处于领先的位置,他们都成功开发出了实用系统,比较著名的有美国和以色列合作的“重现耶鲁撒冷风貌”、日本的“唐招提寺”、欧盟的“数字古罗马”等大型项目.近年来,随着国家不断投入巨资进行重点文化遗址的保护和复原工作,使得三维激光扫描、虚拟现实、基于内容检索等高端技术在考古工程中得到了大量的应用,我国的虚拟展示技术研究及应用也取得了长足进展,比较著名的有北京水晶石公司的“清明上河图动画再现”、北京大学的“故宫三维虚拟展示”、浙江大学的“敦煌艺术数字保护与虚拟旅游”等系统.这些大型项目的共同特点是部署在遗址所在景区,强调沉浸感、真实感,需要环幕、穹幕、CAVE等特殊的三维展示设备,且都基于多台高性能的图形工作站运行.目前,基于网络开发、部署和发布,部署在部门级服务器上的遗址虚拟展示系统还有待进一步开发.
图1 虚拟耶路撒冷
本文以唐小雁塔遗址的三维虚拟展示项目为实例,主要探讨利用地面激光三维扫描和测量成果真实地再现遗址场景,进而实现基于网络的遗址三维虚拟展示的工程化方法,以期为其他古遗址的真实感三维虚拟展示提供借鉴.
1 技术路线
我国现存的古遗址通常规模宏大,不仅拥有大量的古代建筑,往往还拥有大量的仿古建筑.前者因其独特的历史和文化价值,必须进行真实感的三维数字化处理;后者作为遗址建筑群的附属物,一般进行视觉层面的三维数字化处理即可.根据项目实践经验,我们提出对大型古遗址采用“主体建筑基于三维激光扫描技术精细建模,附属建筑结合法式测量技术快速建模”的解决方案.
综合相关文献和实践经验,从工程应用的角度,本文提出一种工程化的技术路线(如图2所示),主要步骤包括:(1)规划重建对象,调研遗址区域概况,明确所要达到的仿真目标;(2)采集建模数据,获取虚拟展示必需的三维扫描数据和人工测量数据;(3)建立地形模型,使用采集的三维数据创建遗址的地形模型;(4)添加地物模型,向地形模型中添加在3D Max等软件中创建的遗址地物模型,以丰富虚拟场景的视觉效果;(5)模型优化,为了获得更好的运行性能,通过LOD等方法压缩场景模型的三角面片数;(6)模型导入,将遗址场景模型导入三维虚拟漫游平台VRPlatform中,构造具有漫游功能的虚拟遗址对象;(7)模型嵌入,将遗址模型嵌入基于WebGIS技术和VR技术开发的古遗址三维虚拟展示系统中.
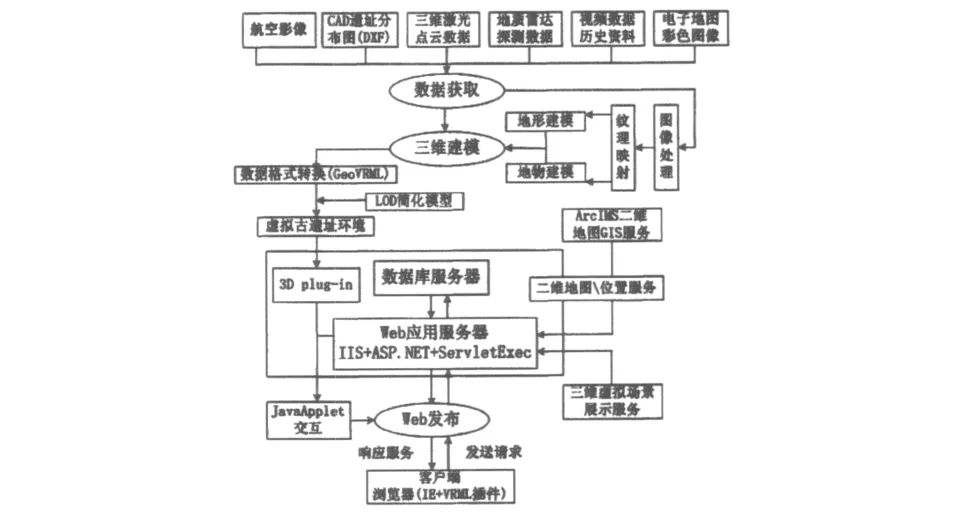
图2 技术路线图
1.1 场景数据的获取
为了能够快速、精确、全方位地获取遗址的三维数据,实践中多采用地面或机载三维激光扫描等非接触测量方法.其原因在于,现存的古遗址由于风吹、雨淋、雷击、地震等自然因素和旅游开发等人为因素的影响,几乎都存在严重的变形和破损.采用标杆、标尺等传统的手工方法,不仅测量工作量大、精确度低,对较高的遗存物进行攀爬测量还会使文物进一步受损,也容易造成工作人员受伤.
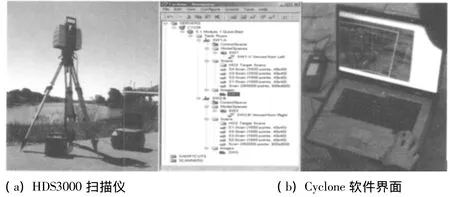
图3 HDS 3000三维地面激光扫描系统
如图3所示,HDS3000激光扫描仪能够实现270°~360°视场范围的扫描,测距范围达300多米,单点测量精度±6毫米,平均数据采集速度10000点/秒,最大数据采集速度50000点/秒.该系统自带的Cyc1one 5.5是一套面向工程应用的三维数据处理软件平台,由扫描、拼接和建模等三个模块构成,使用该软件可完成从扫描仪管理、野外测量、数据拼接等工作流程.
与传统测量手段相比,利用三维激光测量法获取遗址数据具有以下优点:(1)可直接获取遗址场景的三维高精度点云模型,有效避免光学照相测量固有的变形误差,精确记录遗址场景的空间布局和结构属性;(2)可通过机载软件对场景点云模型进行精度达毫米级的三维空间测量,降低了传统方法中人工计算或推导的不确定性;(3)可避免攀爬测量对遗迹可能造成的损害,实现对柔性目标、危险区域的特殊测量,保证测绘人员的安全;(4)可通过接口对数码相机提供校准、定向和照片采集等操作,有利于现场发现问题,避免后期数据处理中的不确定性.因此,实践中应选择以三维激光扫描为主、人工法式测量为辅的方案.
1.2 场景数据的融合
要获取古遗址的全景数据,项目实施中必须规划多个扫描机位,且这些机位从拓扑结构上必须形成闭合环路.对每个扫描机位获取的局部点云数据,必须借助多视点云配准算法才能实现场景数据的融合.经典的多视点云配准方法有ICP(Iterative Closest Point)算法和基于特征的配准算法.ICP算法的配准单元是点,要求待配准的相邻点云子集采样分布率相同.如果初始配准估计不当,迭代过程中易陷入局部最优解;基于特征的配准算法虽然不需要初始配准估计,但如果从点云中计算出的特征信息不充分,配准就会失败.
然而,项目实施中我们发现,无论是经典的ICP算法还是基于特征的算法,都无法直接应用于遗址场景的多视点云配准.其原因有二:(1)为了获取遗址文物的细节信息,在场景扫描过程中,相邻机位也常常需要设置不同的扫描分辨率,因此无法保证待配准的相邻点云间具有相同的采样分布率;(2)古建筑和附属文物的几何形状通常十分复杂,直接从其点云数据计算合适的三维特征十分困难.
为解决这一难题,国内外学者进行了很多研究[2].文献[3]提出以马氏距离代替欧氏距离搜索最近点,利用反向投影加速最近点搜索,同时依靠插值法修正最近点,避开了采样分辨率不同对配准结果的影响.针对遗址场景这种超大数据集,本文提出一种以渐进方式实现遗址场景点云融合的工程化方法,应用角不变特征选择可靠对应点完成点云模型的配准,具体步骤如下:
Step1.初值选择.为避免ICP算法可能会出现的迭代发散现象,通过人机交互在相邻点云中选择几个大体上是公共点的迭代初值点,使迭代初值接近真实值,从而有效缩短计算时间,加快收敛速度.
Step2.手动粗配.以扫描同步获取的场景照片为参照,将相邻点云(Si,Si+1)的配准约束条件设置为“Manually Adding Constraints”模式,通过不断调整约束条件的取值,实现相邻点云的粗略配准.
Step3.自动初配.基于靶标、定标球等公共标定物,通过将相邻点云(Si,Si+1)的配准约束条件设置为“Matching Registration Labels”模式,自动实现相邻点云间的初步配准.这一阶段的配准精度一般,常常存在部分重影现象,如图4(b)所示.
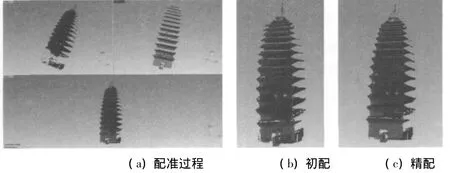
图4 塔体多视点云的配准过程
Step4.配准优化.将相邻点云(Si,Si+1)的配准约束条件设置为“Auto-Add Constraints”模式,通过观察评估配准误差,采用最优估计使配准对象尽可能紧密地排列在Scan World中.如果结果不理想,则取消配准操作,增加约束条件后重新进行配准,直至取得理想的配准结果,如图4(c)所示.
在采用上述方法精确匹配时,为了剔除错误的匹配点对,通常需要对每次获得的匹配点对再进行一次筛选,去掉其中与标准方差距离较大的点对.基于上述方法,项目组在实现相邻机位点云精确配准的基础上,将改进的ICP算法应用于大数据集点云模型的配准和融合,通过坐标变换渐进地把局部配准的点云导入到Home Scan World坐标系中,实现了小雁塔塔体部分场景的多视点云融合,如图5所示.
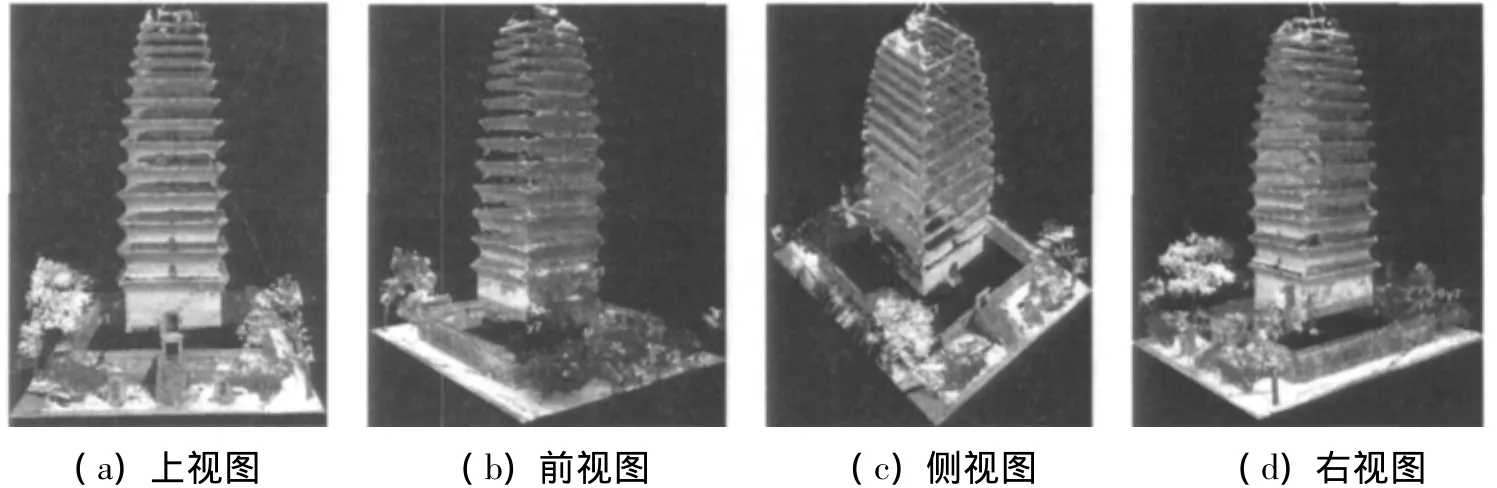
图5 小雁塔塔体的完整点云
1.3 场景的几何建模
三维激光扫描仪获得的点云由海量离散的矢量坐标点构成.由于点云没有明显的形体信息和拓扑关系信息,遗址场景的点云模型仅包含测点的空间坐标和激光反射强度信息,本质上是测点的离散数据集合.因此,要实现遗址场景的三维虚拟展示,考虑数据本身蕴含的丰富信息,就必须采用三角剖分等方法重建遗址场景的三维几何模型[4].文献[5]利用激光扫描数据的结构化特点,首先生成各视点局部点云的三角网格,然后将各视点的三角网格拼合,其缺陷是每一步的误差都会影响建模精度,无法平滑多视点云配准误差.
实践表明,Cyclone、3D Max等建模工具对小雁塔塔体这种棱角较多、结构复杂、局部有破损的非规则实体,建模效果并不理想,如图6(b)所示.项目实践经验表明,在三维模型的重建上,应采用局部建网策略,从而降低算法复杂性;在剖分算法的设计上,应以分治法为主,同时结合逐点插入法,从而提高算法计算性能.同时,实际建模过程中,应用最好的网格拟合三维点集,尽可能平滑掉部分测量误差.应用上述方法,项目组成功地重建了小雁塔的塔体区域,如图6(c)所示.
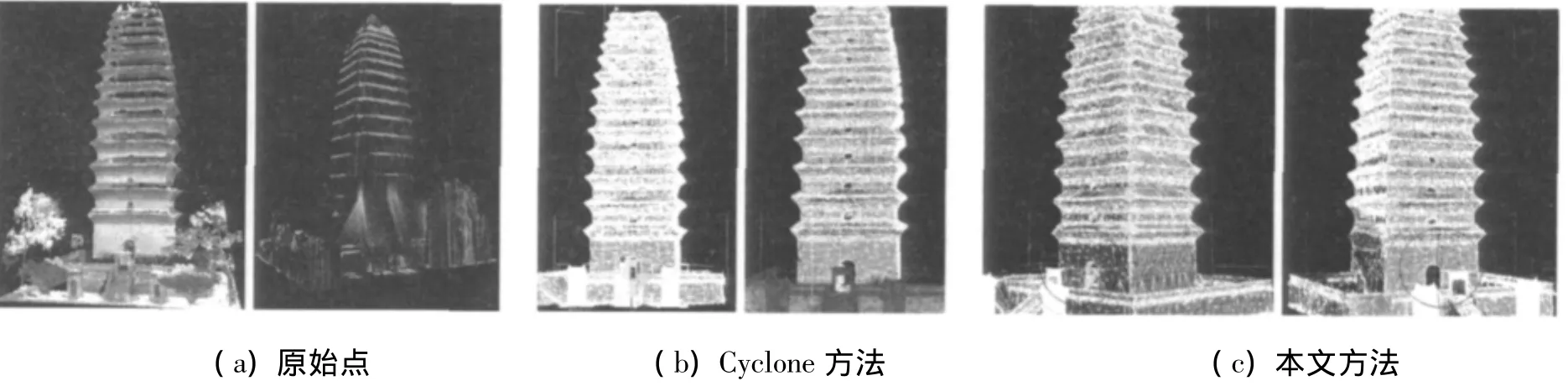
图6 塔体模型重建效果比较
1.4 场景的纹理映射
纹理映射是实现场景真实感三维展示的关键,需要使用描述相机光学特性的内参数和描述相机空间位置的外参数计算纹理映射关系.从工程应用的角度看,目前尚无一种大场景三维纹理映射技术能达到摄影级别的真实感效果.究其原因,是由于相机参数估计使用的是一个理想的针孔成像模型,因此计算得到的相机参数不够准确,造成场景纹理映射的误差较大.文献[6]将三维场景中的实体表面分解成三角形面片的图形学形式,采用向量运算的方法,实现了纹理图像在映射过程中的合理形变,保证了面片与面片之间的纹理连续性.该方法计算量小、失真度低,能够在一定程度上增强纹理映射的真实感,但其实用性还有待进一步验证.文献[7]提出以激光同步扫描可见光图像为中介,以不固定相机位置的方式实现纹理映射,并通过两步法进行误差估计和反向误差补偿以提高映射精度.考虑现有方法的优势和不足,本文采用以激光同步扫描可见光图像为中介,不固定相机位置的方式实现纹理映射,并通过两步法进行误差估计和补偿以提高映射精度,取得了比较理想的效果,如图7所示.
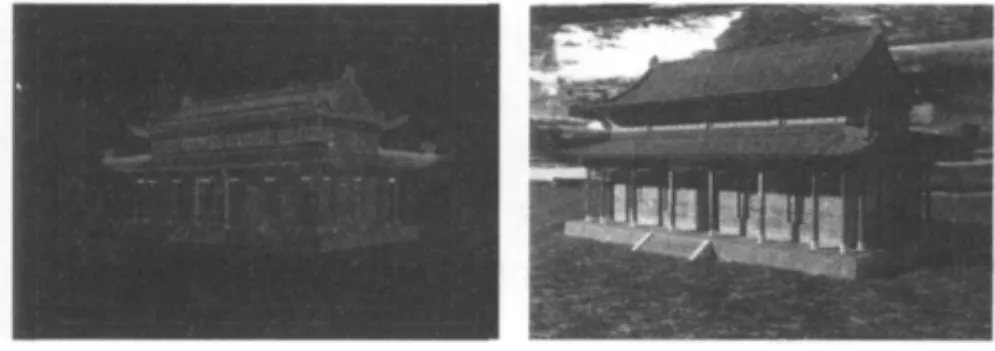
图7 小雁塔三维模型纹理映射效果
1.5 场景模型的构建
现存的古遗址通常结构复杂、空间狭小,一般没有原始建筑图纸.因此,借助Auto CAD、3D Max等建模工具,在测绘数据的基础上绘制遗址古建筑的设计图,进而还原遗址三维场景,是实现文化遗址数字化保护和虚拟展示的一种实用、高效的方法.
基于这一思路,配合西安市文物局对小雁塔的保护、修缮工作,在小雁塔文化遗址建筑群真实测绘数据的基础上,我们根据小雁塔文化遗址建筑物的格调和布局特点,通过合理剪裁点云和设置投影平面得到了一系列剖面图,并成功构建了小雁塔遗址场景的完整三维模型,如图8(a)所示.进一步,基于中视点三维虚拟漫游平台(Virtual Reality Platform,VRP)的EAI接口,将小雁塔遗址全景三维表面模型导入,最终生成了一个可用于网络化发布的虚拟小雁塔三维全景对象,如图8(b)所示.最后,通过研究古代文献,正确设置场景的相机、光照和漫游路径,并进行场景模型的渲染和烘焙,极大地增强了小雁塔遗址场景的真实感,如图8(c)所示.

图8 小雁塔遗址全景模型
2 系统的设计与实现
随着高速互联网技术的普及,文化旅游爱好者已经可以很便捷地访问相关的考古网站,从而获取感兴趣的著名文化遗址的相关信息.因此,基于VR技术和GIS技术,设计和开发一个构建在Internet基础服务之上、能为文化旅游爱好者提供遗址信息智能检索和虚拟展示功能的古遗址多维数据平台(Archaeological site Multi-Dimension Virtual Exhibition System,AVESMD)就十分必要.
2.1 系统分析
从古遗址数字化虚拟展示工程应用的角度,AVESMD平台应具备以下特性:
(1)信息表达方式上,应在文本、图像、音频和视频等二维信息表达形式的基础之上,引入矢量地图、三维模型等空间信息表达形式,从而构建一个多维度的信息表达模式.
(2)信息管理方式上,应基于成熟的关系数据库技术,通过引入空间对象管理技术,实现对遗址发掘现场三维模型等特殊对象信息的存储、组织和管理.
(3)信息服务方式上,应在文本检索模式之外,提供基于内容的检索手段,查询结果应该以文本、图像、地图和模型对象等更生动、更直观的方式呈现给用户.
(4)系统体系结构上,应基于B/S的三层架构模式,即发掘现场的信息存储在按信息类别划分的多个数据库服务器中,用户基于扩展的浏览器软件实现对一组按服务类型划分的Web服务器的交互式访问.
(5)信息管理模式上,应基于开放式、分布式的模式,即发掘现场不同类别信息的收集、整理和发布由承担相应任务的工作小组或人员分别完成,系统通过用户角色权限控制等方法实现信息的“隐性集中管理”.
(6)开发团队的组织上,应基于领域专家小组模式,在系统需求分析阶段以考古专家为主,在三维扫描建模阶段以计算机专家为主,在模型真实感处理阶段以数字媒体处理专家为主.
2.2 系统体系结构
AVESMD系统采用N层B/S架构,分为表现层、业务逻辑层、数据层和数据库共四层,具有成本低、可伸缩、安全性高等特性,其框架结构如图9所示.在这种体系结构下,用户工作界面通过WWW浏览器来实现,极少部分事务逻辑在前端(Browser)实现,主要事务逻辑在服务器端(Server)实现,这样就大大简化了客户端载荷,减轻了系统维护与升级的成本和工作量,降低了用户的总体成本(TCO),在平衡网络负载、达到最大响应速度的同时,避免了在客户机上分发应用程序与版本控制的困难.
此外,系统开发技术基于主流的Internet基础服务(.NET Framework)、地理信息基础服务(MapX-treme)和数据库服务平台(SQL、Oracle),采用通用的脚本语言(Java、C#),并借助第三方插件(VRML、VRP)简化三维模型处理的复杂度,使系统具有与平台无关的特性,从而使系统易于部署和实现,同时也能大大降低开发的风险.
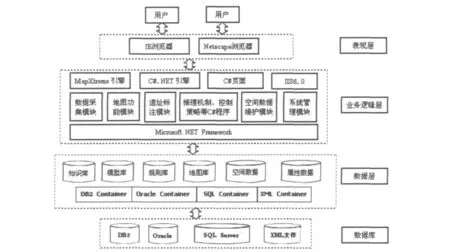
图9 AVESMD系统框架结构
2.3 系统主要功能
2.3.1 信息查询功能
如图10所示,用户使用标准的浏览器,安装相应的VRML插件后,通过AVESMD系统的属性信息查询窗口,就可自由浏览和检索相关文化遗址所提供的公共服务信息,包括古遗址的地理位置、文化属性、研究文献、文物图片、发掘场景和遗址模型等多维信息的浏览、检索和分析[8].

图10 AVESMD系统遗址属性信息查询
2.3.2 空间分析功能
用户通过AVESMD系统提供的点选、圈选、框选、不规则选择等空间对象选择工具,以人机交互方式选择一个或多个遗址空间对象,然后单击查询按钮,就能获得该遗址的空间GIS信息和文化属性信息,如图11所示.同时,AVESMD系统将遗址的位置分布、空间布局等GIS信息与文化层时代、考古要素等属性信息有机融合,利用地理特征的ID码机制,为用户提供基于图元的遗址信息空间分析功能.用户只需设置一系列分析参数,系统就能根据遗址之间的距离向量值和文化层属性的相似度自动进行聚类分析,并以可视化方式绘制出用户选择的地理区域内古文化遗址群落的关联轨迹图,从而为考古研究者提供附加服务和信息.
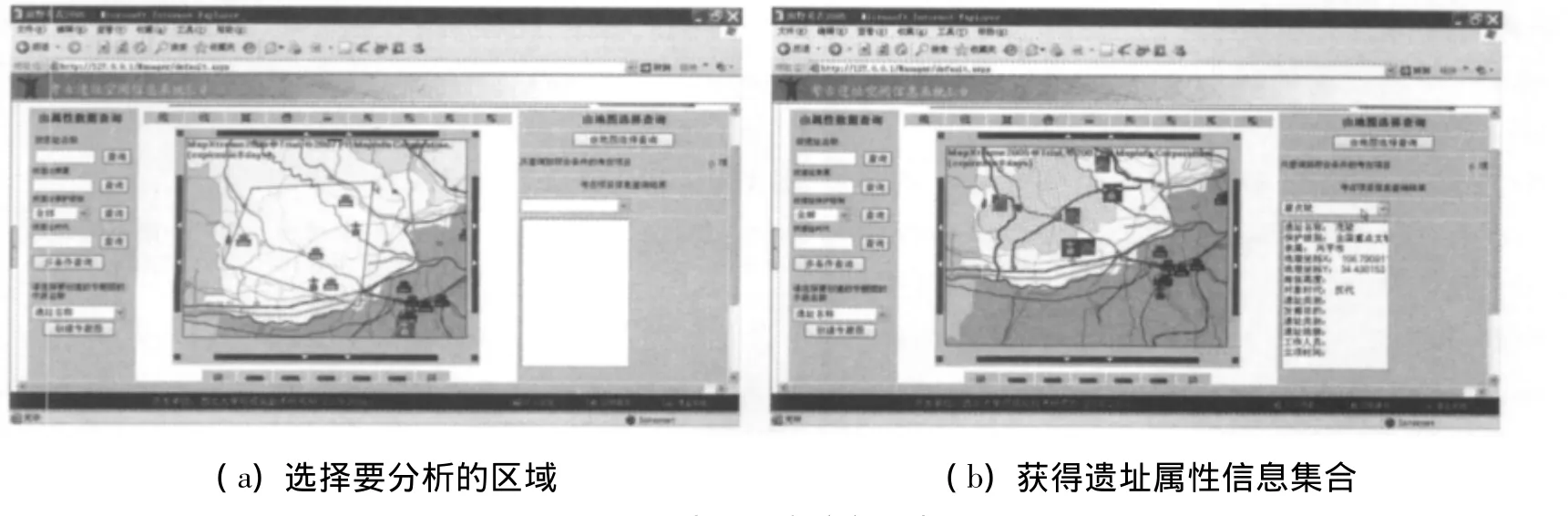
图11 遗址分布空间分析界面
2.3.3 三维虚拟漫游功能
AVESMD系统能为用户提供文化遗址的多角度环视真实感场景虚拟展示,用户在安装了VRML插件的浏览器中可以对遗址场景、珍贵遗存物的三维模型进行放大、缩小、移动、多角度观看等操作.经过深入编程,借助VRPlatform中间件的外部创作接口(External Authoring Interface,EAI),AVESMD系统可实现场景中的热点链接、多场景之间虚拟漫游等功能,支持用户以四种常见模式实现与遗址虚拟场景环境的交互式漫游:(1)模式一,系统按照专家策略规划出最佳游览路径、最佳观察视角、最佳展示方式,为游客提供自动导游服务;(2)模式二,系统提供一组预设的遗址场景相机位置,游客通过选择视点位置的特定相机,实现对虚拟场景中感兴趣的建筑物和珍贵遗存物的近景式观赏;(3)模式三,系统提供人机交互方式的虚拟漫游,用户通过鼠标、触摸屏等设备可实时控制漫游方向和调整视点,以自主方式实现对遗址场景的三维漫游;(4)模式四,系统支持智能漫游,用户只需选择出发位置和目的地,即可自动生成最佳游览路径并提供自动导航服务.为简化漫游的操作,实践中可在遗址场景中采集尽可能多的视点,使用户单击或者双击三维实景中的地面就能实现场景切换,增强漫游的真实感与沉浸感,如图12所示.
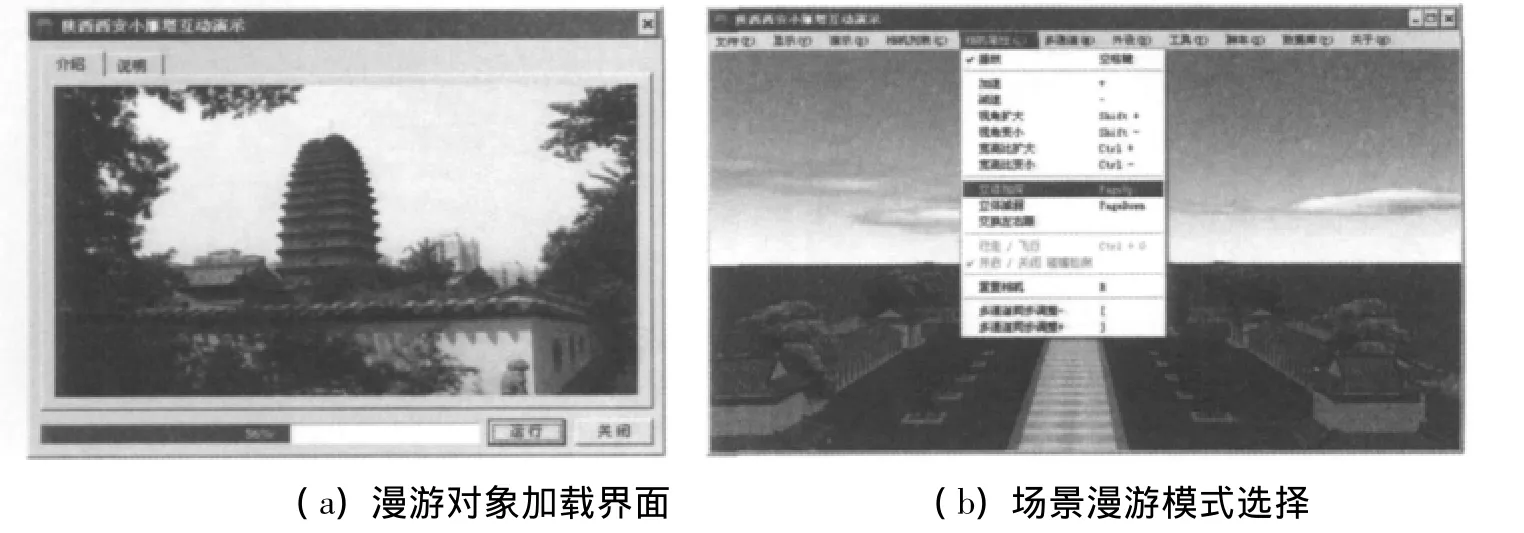
图12 场景的三维虚拟展示
3 结语
在小雁塔项目实践的基础上,本文探讨了基于激光扫描技术的古遗址场景三维模型重建的技术路线,提出了一种对大型文化遗址场景进行三维真实感快速建模的方法,确立了基于Web GIS和VR技术的古遗址三维虚拟展示系统的体系框架和主要功能.应用本文提出的方法,项目组获取了小雁塔塔体、白衣阁、紫光阁等重要遗存的高精度点云模型,实现了对这一已有1300多年历史的重要文化遗产的数字化保护,并成功构建了一个具有真实感的数字小雁塔三维虚拟展示系统.
通过三维虚拟方式全面展示遗址景区、景点面貌和各项旅游服务,给观赏者身临其境的体验,激发观赏者实地游览的欲望,是文化旅游景区宣传推广的最佳创新途径.可以预见,随着陕西省的“山水秦岭,人文陕西”理念的实施,文化遗址三维虚拟展示技术研究及应用必将推动陕西省文化遗产保护和文化旅游事业的进一步发展.
[1]Barcelo J,Forte M,Sanders D H.Virtual Reality in Archaeology[M].Oxford:Archeo Press,2000.
[2]Stamos I,Leordeann M.Automated Feature-Based Range Registration of Urban Scenes of Large Scale[J].Computer Vision and Pattern Recognition,2003,(2):555 -561.
[3]刘军,耿国华.古遗址多视点云的渐进式三维配准[J].计算机应用研究,2011,28(10):3970-3973.
[4]Hoppe H,T DeRose,Duchamp T.Surface Reconstruction from Unorganized Points[J].ACM Proceedings of SIGGTAPH,1992,26(2):71-78.
[5]张爱武,孙卫东,李风亭.基于激光扫描数据的室外场景表面重建方法[J].系统仿真学报,2005,17(2):384-391.
[6]Stamos I,Allen P K.Geometry and texture recovery of scenes of large scale[J].Computer Vision and Image Understanding,2000,88(2):94 -118.
[7]潘吟飞,许端清.一种基于向量运算的三维真实感纹理映射方法[J].计算机工程,2004,30(21):53-54.
[8]刘军,耿国华.文化遗址的三维真实感建模与虚拟展示技术[J].计算机工程,2010,36(20):286-290.
猜你喜欢
英语世界(2022年9期)2022-10-18
汉语世界(2022年5期)2022-10-15
扬子江(2022年3期)2022-05-07
辽金历史与考古(2021年0期)2021-07-29
音乐天地(音乐创作版)(2019年4期)2019-06-24
知识经济·中国直销(2018年2期)2018-04-10
戏剧之家(2016年20期)2016-11-09
电脑知识与技术(2015年30期)2016-01-09
大众考古(2014年2期)2014-06-26
文物春秋(2009年3期)2009-09-21
