
磁敏传感器转速测量技术研究
2013-06-14 06:56秦玉伟
渭南师范学院学报 2013年2期
秦玉伟
(渭南师范学院物理与电气工程学院,陕西渭南714000)
0 引言
在自动控制系统、自动化仪表以及汽车行业中大量使用各种电机,因而对低速、高速、稳速和瞬时速度的精确测量有严格的要求.通常情况下使用转速传感器将旋转物体的转速转换为电量输出.转速传感器属于间接式测量装置,可以测量机械、电气、磁、光和混合式等非电量信号,并将微弱的非电量信号转换成电量信号.转速传感器的种类繁多,常用有光电式、电容式、磁电式以及霍尔式等.光电式和电容式传感器测量过程极易受到环境因素的干扰,如水、灰尘、油污等,而引起测量误差和误操作,因而限制了其使用范围.电感式转速传感器利用电磁感应原理制成,其输出的感应电势是由于磁通变化率引起的,因此感应电势的大小取决于磁通变化率高低,即与被测物体的转速有关.此外,电压输出大小受物体与传感器之间的气隙大小影响,当气隙一定时,物体转速越高,输出电压越大;转速一定时,气隙越小,输出电压越大,对于低转速测量,电压输出较小,信号处理电路相对复杂[1].本文介绍的磁敏传感器以磁场为媒介,该传感器对信号的检测过程不需要从磁场中获取能量[2-4],其输出电压大小不因转速高低而改变,具有较强的防水、耐油污和抗干扰能力,能适应恶劣工作环境,且检测距离较远,可以有效避免检测过程与被检测物体发生碰撞.磁敏传感器制造方法简单、成本低、体积小、重量轻,因而可替代传统的磁电式和霍尔传感器,对铁磁性齿轮的转速进行测量.
1 工作原理及信号处理电路
磁敏传感器是利用磁阻效应原理的一种传感器.磁阻效应是指当通有电流的半导体材料置于磁场中且磁场方向与其垂直时,载流子会受到洛仑兹力的作用,运动方向发生偏转,因而运动路径加长.从电学量来看,这反映为电阻率的增大,即电阻增大.当材料相同的两种载流子(电子和空穴)迁移率相差悬殊,以至于空穴的迁移率可以忽略不计时,其电阻率的变化可以用下式表示[2-4]:

其中:B为外加磁场的磁感应强度,ρB、ρ0是磁感应强度分别为B和0时材料的电阻率,μ为材料中该载流子的迁移率.由于锑化铟材料的电子迁移率较高,因此将其置于磁场时可以获得较高的电阻变化率,因而适合制作高灵敏度磁敏传感器.由式(1)可以看出,电阻率变化为一个二次曲线,当磁感应强度B提高到一定大小时,可以将变化率的工作范围移动到近似线性关系以内,提高其工作灵敏度.因此,在磁敏传感器的实际使用过程中,可以使用较强磁感应强度的铁磁性检测物体或者给磁敏传感器提供偏置磁场来提高其灵敏度.
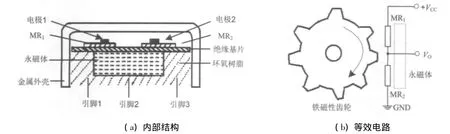
图1 磁敏传感器结构及等效电路
磁敏传感器由三个引脚、锑化铟磁敏电阻MR1和MR2、永磁体、绝缘基片和金属外壳等几个部分组成,其内部结构与等效电路如图1所示[5-6].图1(a)中,两个锑化铟磁敏电阻的阻值大致相等,金属外壳起到屏蔽外部干扰信号和保护内部磁敏电阻的作用;永磁体可以为磁敏传感器提供偏置磁场,使磁敏传感器的工作特性移到电阻—磁场关系曲线的线性范围内,提高其检测灵敏度.图1(b)中,当待检测齿轮的转速为零时,偏置磁场使两个磁敏电阻处于相同的磁场环境,因此磁敏电阻的阻值大致相等,磁敏传感器输出电压值约为其供电电源电压的一半.当铁磁性齿轮转动时,齿轮的齿尖对准MR1时,齿轮的齿跟正好对准MR2,因此齿轮的转动将引起MR1和MR2所处的空间磁场发生周期性变化,因此磁阻元件的阻值也会发生周期性变化,在磁敏传感器供电电源电压不变的情况下,磁敏传感器就会输出周期性变化的电压.若输出信号频率、齿轮转速和齿轮数分别为f、n(r/s)和z,则三者关系为f=nz.由此可知,在齿轮数目保持不变的情况下,磁敏传感器输出电压信号的频率f只与齿轮的转速n有关,因此只要得到输出电压信号的频率,就可以得知齿轮的转速,实现对转速的测量.由于磁敏传感器所处空间的磁感应强度变化极其微弱,因此磁敏传感器将采集到的周期性变化的微弱磁信号转化成电压信号后,需要经过信号处理电路进行放大,并通过带通滤波电路,滤除高频和低频的干扰信号,最终转化为方波信号,就可以根据输出波形的频率计算出齿轮转速,信号处理电路如图2所示.
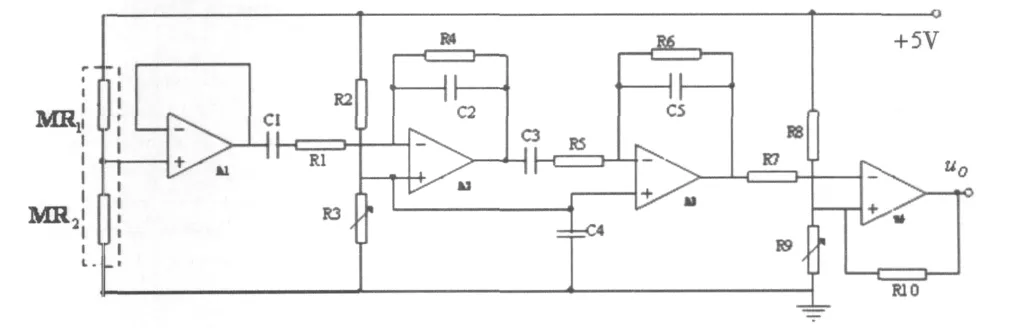
图2 信号处理电路
信号处理电路由电压跟随器、两级带通放大电路、滞回比较器组成.其中虚线部分表示磁敏传感器,因铁磁性检测信号极其微弱,故整个放大电路部分采用两级放大电路.A1为电压跟随器,起到阻抗变换的作用,可以减小前后级电路对磁敏电阻的影响;A2、A3为两级放大电路,可以起到信号放大的作用,同时滤除电路以及环境中存在的低频和高频干扰噪声;A4为滞回比较器,可以有效避免因电路的干扰以及环境的振动引起的错误输出信号,输出理想的脉冲信号.
电路采用+5 V直流电压,磁敏传感器采集到齿轮的转动信号后,通过跟随器后进入两级放大电路进行放大,电路采用阻容耦合方式进行连接,可以消除低频信号对电路的影响,抑制环境温漂引起的传感器微弱电压输出变化,提高电路稳定性.电压放大倍数可通过设置反馈电阻R4与R2,R6与R5的比值实现,滞回比较器的阈值电压可以通过调节R9设置.利用滞回比较器,相当于引入了正反馈网络,大大提高了系统的抗干扰能力,可有效避免齿轮转动过程中由于振动或其他环境因素引起的电磁干扰,减少错误输出,提高输出稳定性和测量可靠性.
2 实验结果与结论
在-25℃ ~+85℃的工作环境下,改变环境温度,随机挑选10只相同类型的磁敏传感器,分别对同一个旋转齿轮进行转速测量实验,并重复10次上述实验.实验研究结果表明,在工作频率为0~10 kHz的齿轮转速范围内,当磁敏传感器与旋转齿轮之间的检测距离为2~5 mm时,磁敏传感器都能够采集到齿轮信号,且工作特性稳定,能输出比较工整的脉冲信号,其测量过程中传感器的输出信号大小不受齿轮转速高低影响.多次测量结果表明,该传感器测量的齿轮转速值与某商用磁电式传感器的测量值相同,测量过程中未出现测量误差,说明该磁敏传感器测量转速工作性能稳定,测量结果可靠有效.由于磁敏传感器的抗干扰能力较强,能在恶劣环境下工作,且检测距离较长,因而可以替代传统的磁电式转速传感器,用于对铁磁性齿轮的转速测量,用于改造汽车齿轮转速传感器、ABS转速传感器以及其他领域的齿轮转速传感器等.
[1]汪知望,方锡邦,陈燕.汽车ABS轮速传感器及其信号处理[J].汽车科技,2006,7(4):28-31.
[2]曲喜新.电子元件材料手册[M].北京:电子工业出版社,1989.
[3]张之圣,胡明,刘志刚,等.InSb磁敏电阻器导电机理及可靠性[J].半导体学报,1996,17(2):136-140.
[4]黄钊洪.InSb-In共晶体磁阻薄膜的晶面和磁阻特性[J].传感器技术,2001,20(8):7-9.
[5]刘洪,黄钊洪,代贵华,等.InSb-In共晶体薄膜磁阻式齿轮转速传感器[J].传感器技术,2002,21(5):19-21.
[6]周冬跃,黄钊洪.可用于低转速测量的锑化铟齿轮转速传感器设计[J].计算机测量与控制,2004,12(9):898-900.
猜你喜欢
大电机技术(2022年5期)2022-11-17
当代陕西(2022年6期)2022-04-19
娃娃乐园·综合智能(2021年12期)2022-01-18
内燃机工程(2021年6期)2021-12-10
防爆电机(2021年4期)2021-07-28
少儿科学周刊·少年版(2020年9期)2020-03-04
少儿科学周刊·少年版(2020年9期)2020-03-04
电子制作(2018年19期)2018-11-14
制造技术与机床(2017年3期)2017-06-23
中学生数理化·高二版(2016年12期)2017-02-28
