
一种用于VTS 导航雷达的杂波图恒虚警率处理技术
2013-06-08 08:40练学辉
雷达与对抗 2013年3期
练学辉,丁 春
(1.海军驻南京地区雷达系统军事代表室,南京 210003;2.中国船舶重工集团公司第七二四研究所,南京 210003)
0 引言
船舶交通管理系统(Vessel Traffic Services,简称VTS)中的导航雷达一般是固定部署,提供水面船只或者浮标等目标的点迹或航迹供用户使用。部署于国内某VTS中的导航雷达全天候工作,监视范围从几千米到几十千米不等,需要处理包括江面杂波、云雨杂波、地物杂波等在内的各种杂波。对于固定部署的雷达,常采用各种杂波图技术实现恒虚警率检测。JY-14雷达是一部现代三坐标对空监视雷达,采用了多种杂波图,不仅提供气象杂波的速度图,也提供地杂波的杂波轮廓图。ASR-10SS 是一种用于航管的监视雷达,杂波图技术在其中的功能包括零频通道切向目标检测、各频道CFAR 门限控制、控制射频和中频的衰减、提供气象速度图、滤除固定杂波等。利用经典的杂波图理论,对于地物杂波的处理可以获得比较理想的效果,但在某些极端环境下会有较多剩余杂波。例如,当风力较大时,江面波浪会产生服从瑞利分布的杂波。经典的杂波图理论使用一定时间内杂波功率的均值估计检测门限,产生较多剩余杂波,导致较大虚警。当剩余杂波超过一定数量时,会产生饱和现象。有序统计的方法可以有效解决这类问题,但涉及到单元格内部所有雷达分辨单元幅度的排序,计算量较大,对硬件要求较高。本文引入自适应剩余杂波饱和抑制技术,可以迅速判断并解决剩余杂波饱和的问题。
1 杂波图恒虚警率处理模型
杂波图恒虚警率处理一般涉及以下三个重要的方面,一是杂波图的拓扑结构如何划分,二是每一个杂波图单元格中的杂波功率如何估计,三是杂波图单元格中的检测门限如何根据杂波功率设置。
1.1 杂波图的拓扑结构
杂波图的拓扑结构指对于监视区域如何划分。最常用的拓扑结构是将杂波图单元格的距离宽度和方位宽度都设为相同。针对不同的应用环境,常需结合实际情况及距离远近,选择更细致复杂的划分方式,需要解决好杂波拓扑与环境匹配、工程易用性等问题。在该VTS中,一般在10 km左右就有桥梁遮挡或者是航道弯曲带来的遮挡,实际有效监视距离大约是10 km,背景环境相对简单。杂波图中所有单元格的距离宽度设为实际探测区域中绝大多数运动目标回波距离宽度的5 倍,方位宽度设为实际探测区域中绝大多数运动目标回波方位宽度的3 倍,即可与实际环境较好地匹配。杂波图单元格过小,会以较大的概率产生“自遮蔽”效应;杂波图单元格过大,可能会同时包含江面、船只、浮标、桥梁、岛屿等不同类型的回波,导致杂波分布的改变,导致较大的虚警率或者较大的恒虚警率损失。本文不考虑杂波图单元格包含桥梁和岛屿的情况,只考虑杂波图单元格最多包含江面、船只、浮标3种回波的情况。
1.2 杂波功率估计
对于某一杂波图单元格,在第k个天线周期扫描后,首先计算出当前单元格内所有雷达分辨单元上的平均幅度,记为xk,杂波功率可以通过简单的一阶递归滤波器得到。该滤波器的数学形式为

1.3 杂波图格子的检测门限
在第k个天线周期,某一杂波图单元格内的检测门限可以由下式计算得到:

式中α 是关于检测门限与杂波功率估计的比例系数。检测门限是基于上一个天线周期的杂波功率估计,而不包含当前天线周期的扫描数据。如果当前天线周期该单元格包含目标且参与统计,则将会影响对杂波的估计,抬高检测门限,从而可能导致所谓的自遮蔽效应。


1.4 自适应剩余杂波饱和抑制
剩余杂波饱和产生的原因是对于杂波功率估计偏小,或者是式(2)中的比例系数α 偏小,需要将检测门限增大,以抑制杂波剩余饱和的现象。
记p为预设的过检测门限的雷达分辨单元数与杂波图单元格内雷达分辨单元数N 之比的上限,r 是一微调增量。当过检测门限的雷达分辨单元数大于p×N时,将检测门限Tk增加r,再将各过检测门限的雷达分辨单元与检测门限比较,统计过检测门限的雷达分辨单元数,直到该数值小于p×N为止。其中,微调增量r的取值一般不超过热噪声杂波幅度在最近一段时间内的最大变化范围。p的取值需要通过统计杂波图单元格中最大可容纳目标所含有的雷达分辨单元数来确定。采用这种方法增大检测门限,既减少了剩余杂波,也考虑到了船只的反射功率一般比江面杂波强的情况。
工程中使用包含自适应剩余杂波饱和抑制的杂波图恒虚警率处理某一杂波图单元格的流程如图1所示。
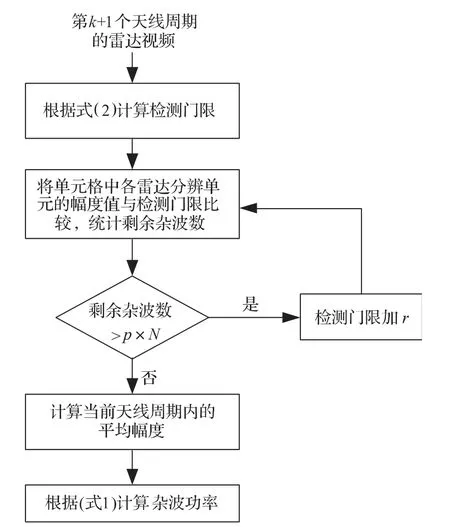
图1 杂波图恒虚警率处理流程图
2 仿真分析
选取某导航雷达含有雨杂波的雷达视频,按照方位7.5°、距离450 m 划分杂波图单元格,以下对于其中某一单元格应用杂波图恒虚警率处理进行分析。图2所示为该单元格中的雷达视频,其中含有一个浮标,两个运动目标,幅度的最小值为1900,最大值为2700。

图2 某单元格中的雷达视频
2.1 杂波功率估计的收敛速度的比较分析

图3 各个天线周期的杂波功率估计
2.2 剩余数的比较分析
因子w 设为0.3,杂波功率估计的初始值^x0取为1960,式(2)中的比例系数α 设为1,过检测门限的雷达分辨单元数与杂波图单元格内雷达分辨单元数之比的上限p分别设为0.1、0.15、0.2和0.25,检测门限的微调增量设为20,运行30个天线周期。
图4所示为检测门限的幅度值。上限p为0.1 对应的检测门限比其他的都高,上限p为0.2和0.25 对应的检测门限基本一致。

图4 最大比例不同时的检测门限的幅度值
图5所示为计算检测门限的次数。上限p为0.1时,在杂波功率估计收敛后计算检测门限的次数在3~5。上限p为0.2和0.25时,在杂波功率估计收敛后只需要计算一次检测门限,因为根据式(2)计算一次检测门限就可以保证过检测门限的雷达分辨单元数满足比例要求。

图5 最大比例不同时的计算检测门限的次数
图6为过检测门限的雷达分辨单元数。上限p 取值为0.15、0.2和0.25时,在杂波功率估计收敛后,过检测门限的雷达分辨单元数介于300~600,取值相差不大。当上限p 降低到0.1时,经过自适应剩余杂波饱和抑制,在杂波功率估计收敛后,过检测门限的雷达分辨单元数降低到250~300。
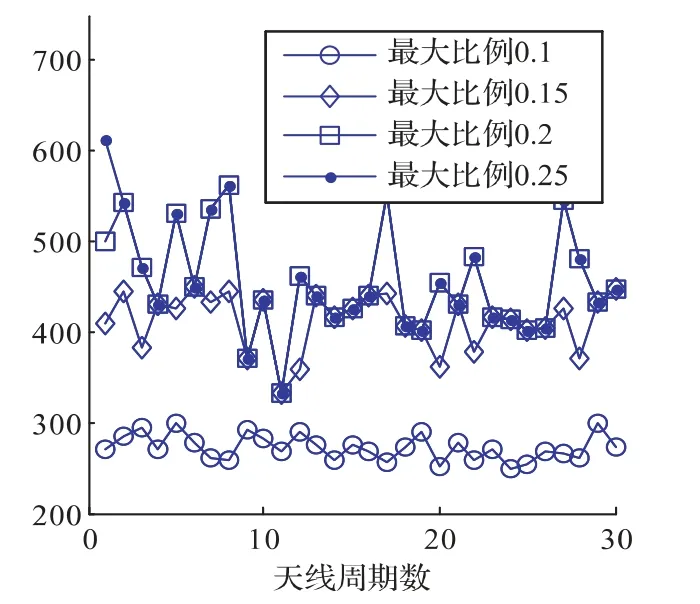
图6 最大比例不同时过检测门限的雷达分辨单元数
图7所示为p 取0.1时图2中的单元格经过自适应剩余杂波饱和抑制的杂波图恒虚警率处理的结果,可以看出杂波有少许残留,浮标以及两个运动目标都得到保留。

图7 杂波图恒虚警率处理的结果
3 结束语
对于杂波图恒虚警处理在某些情况下杂波剩余饱和的问题,本文给出了一种基于自适应剩余杂波饱和抑制的杂波图恒虚警率处理的方法,并且对导航雷达的视频进行了仿真分析。目前,该方法已在某导航雷达目标检测中得到应用,证明了这种方法的有效性。
[1]王小谟,匡永胜,陈忠先,等.监视雷达技术[M].北京:电子工业出版社,2008.1.
[2]Mark A.Richards.雷达信号处理基础[M].北京:电子工业出版社,2008.6.
[3]Ramon Nitzberg.Clutter Map CFAR Analysis[J].IEEE Trans.on Aerospace and Electronic Systems,1986,22(4):419-421.
[4]John N.Briggs,等.航海雷达目标检测[M].北京:电子工业出版社,2009.1.
猜你喜欢
汽车实用技术(2022年4期)2022-03-07
科学与信息化(2021年30期)2021-12-24
电脑爱好者(2021年12期)2021-06-22
电脑爱好者(2021年8期)2021-04-21
雷达与对抗(2020年2期)2020-12-25
火控雷达技术(2020年2期)2020-10-16
数学大王·趣味逻辑(2020年6期)2020-06-22
数学大王·趣味逻辑(2020年5期)2020-06-19
华东师范大学学报(自然科学版)(2020年1期)2020-03-16
数字通信世界(2020年2期)2020-03-04
