
基于方向熵的挠性印制电路基准点定位研究
2013-06-07 10:01杨冬涛黄杰贤龚昌来
激光与红外 2013年10期
杨冬涛,黄杰贤,龚昌来,罗 聪
(嘉应学院电子信息工程学院,广东梅州514015)
基于方向熵的挠性印制电路基准点定位研究
杨冬涛,黄杰贤,龚昌来,罗 聪
(嘉应学院电子信息工程学院,广东梅州514015)
在采用机器视觉技术的挠性印制电路缺陷检测工作中,对基准点的准确定位是实现高质量检测的先决条件。本文选取焊盘圆心或中心作为基准点,针对焊盘的局部形变对基准点定位产生的不良影响,提出了量化目标轮廓边缘方向性的表达方法——方向熵,基于该方法能够获取轮廓坐标与方向参数;接着,根据焊盘模板建立焊盘匹配评估函数筛选出正确的、有价值的、局部的轮廓,并基于轮廓特征实现对焊盘的匹配与对基准点的定位。通过现场测试表明,本文提出的算法能够有效地纠正基准点的定位偏差,将其应用于坐标系变换的目标搜索时,平均定位误差可控制在60um以内,对于后续的目标匹配,缺陷识别与分析具有重大意义。
挠性印刷电路板;基准点;方向熵;定位误差
1 引 言
挠性印制电路(Flexible print board)俗称软板,是一种高密度、可卷绕的印刷电路[1-2],广泛应用于笔记本电脑、智能手机、LCD等产品。随着电子产品朝着轻、薄、小、巧方向发展,挠性电路板将具有越来越广泛的视场前景,基于机器视觉FPC表面缺陷检测工作中,最简单、最常用的方法是采用标准模板图像与实际检测图像上的目标物进行逐一差影操作,并分析差影后的结果实现缺陷检测。因此,在模板图像与检测图像之间选取至少三个基准点,并通过坐标变换[3]将两幅图像进行初次配准是实现缺陷检测重要的,关键的前期工作。通常情况下,选取规则的焊盘如圆、方焊盘的圆心、重心或中心作为基准点(如图1(a)、(b)所示)。而实际制成的焊盘与客户提供的标准模板存在着外形差异(图1(c)、(d)为实际制成的焊盘,焊盘上的方、圆则表示该焊盘应有的外形),使得对基准点的定位发生偏移,直接造成初次图像配准就已存在较大的误差。

图1 用于基准点定位的焊盘
尽管有许多研究人员通过后续的误差修正(如霍夫变换法[4]、轮廓特征法[5]、函数修正法[6]、互信息熵与区域特征相结合的方法[7-8])以提高对检测目标物的匹配精度。但经现场测试表明,以上误差修正算法的有效性要求图像初次配准的误差限定在一定范围内,否则误差修正算法将失效。同时,初次配准的误差过大也将造成误差修正算法运行时间过长,目标物匹配精度下降的问题。为了提高图像初次配准精度,本文根据焊盘的模板信息,基于有限的轮廓特征实现对焊盘目标的匹配,并最终实现对基准点的精确定位,具体内容包括:①建立方向熵函数,并基于方向熵提取焊盘的边缘轮廓及其方向信息;②根据模板对部分有价值的焊盘轮廓特征信息进行筛选,进行目标匹配;③以匹配后的焊盘中心或圆心作为基准点进行坐标系变换,并通过实验验证本文算法对于提高图像配准精度的有效性与优越性。
2 基于方向熵的轮廓特征与方向信息提取
尽管图1的焊盘与标准模板存在一定的外形差异,但仍保留部分有价值的轮廓特征信息,因此,筛选出可供匹配的轮廓是全文的首要工作。本节首先构建方向熵函数以提取焊盘目的轮廓位置信息与方向信息[9-10]。在整幅图像中,某像素点的纹理梯度数学表达式如(1)所示,对应的纹理梯度方向角度计算公式定义为(2)。

从公式(1)、(2)得到θ的取值范围为(0°,90°),本文将θ划分不同的角度级i,i=1,2,...,Nθ在本实验中,当θ∈(0°,10°)时,i=1;当θ∈(10°,20°)时i=2,…,当θ∈(80°,90°)时,Nθ=9为最高角度级。
分别从整幅图像中攫取R×S的图像,定义统计函数fθ(i)统计,如式(3)所示,该公式表示为落入角度级为i的像素统计量,在整幅图像中,像素落入i角度级区间的概率Pθ(i)为:

采用熵的方法度量轮廓角度分布情况,并定义方向熵的数学表达式对轮廓特征及其对应方向信息进行提取,如式(4)所示:

将公式(4)方向熵的数学表达式应用于图2(a)以获取圆形目标的轮廓特征及其对应方向信息。

图2 基于方向熵的轮廓特征信息提取
根据熵可用于度量某变量的不确定性的性质,纹理梯度角度在某个角度级集中分布时,方向熵较小。图2(b)轮廓边缘区域的方向熵低于非边缘区域的方向熵,具有明显的可区分性,从中不仅可以对轮廓的位置进行初步定位,也可获取各轮廓点的方向角度信息。图2(c)为通过设置阈值对目标物轮廓进行分割,并获取各轮廓点的方向角度信息,轮廓坐标与轮廓方向参数分别为
根据设计文件提供的模板边缘位置坐标信息:{(xr1,yr1),(xr2,yr2),…,(xrM,yrM)}及相对应的方向信息:{θr1,θr2,…,θrM},对焊盘进行搜索匹配,搜索评估函数如式(5)所示:

式(5)中,i=1…M;j=1…N;Δx,Δy分别在焊盘检测区域搜索过程中横坐标与纵坐标的修正参数。e为允许的误差值。将搜索评估函数Pix(Δx,Δy)应用于图2(c)的焊盘轮廓进行匹配搜索,图3(a)至图3(d)为搜索过程,图3(e)为每次搜索对应的评估结果。

图3 搜索实验与评估
通过图3的搜索评估实验结果得到,模板轮廓的拟合程度越好,Pix(Δx,Δy)值越大。因此Pix(Δx,Δy)函数可用于评估对检测区域的搜索结果。根据上述分析,在搜索过程中,通过平移标准轮廓,并不断根据公式(5)对搜索结果进行评估。当Pix(Δx,Δy)获取最大值时,即Max(Pixelmn)为最佳的搜索结果,筛选后的轮廓信息如图4(a)所示,根据轮廓信息对目标检测区域的拟合结果如图4(b)所示。下文基于该算法针对局部形变的焊盘的检测区域进行搜索。

图4 基于方向熵的目标匹配
3 基于局部轮廓信息的目标匹配
图5(a)、(d)同为存在局部形变的检测目标。图5(b)、(e)为标准的轮廓模板,在提取轮廓与对应方向参数的基础上(如图5(c)、图5(f)),基于本文提出的算法筛选有价值的轮廓信息,将公式并根据局部轮廓实现对焊盘的拟合匹配。

图5 存在形变的焊盘样品
根据图6、7的实验结果得到,本文提出的算法即使在焊盘存在形变的情况下,也可正确地筛选出轮廓特征并实现目标匹配。更多的实验结果如图8~12所示。

图6 针对局部形变焊盘的匹配实验1
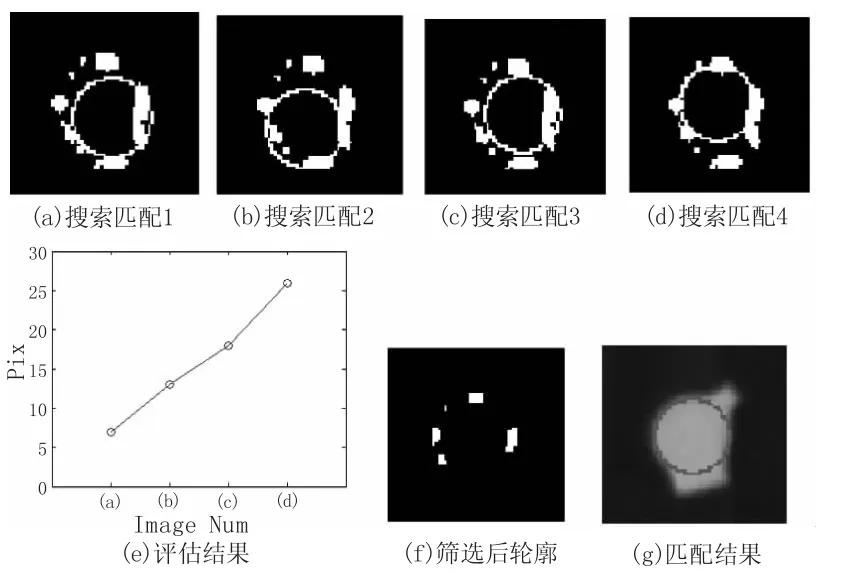
图7 针对局部形变焊盘的匹配实验2

图8 匹配实验1

图9 匹配实验2

图10 匹配实验3

图11 匹配实验4

图12 匹配实验5
4 基于坐标系转换的图像匹配
实现对存在局部形变的焊盘目标匹配后,选取目标物的圆心或重心作为基准点对FPC图像进行坐标系转换,并验证本文算法对于提高图像配准精度的有效性。图13(a),(b)为参考图像与检测图像两个坐标系,分别选取标准图像与检测图像的3个基准点A、B、C和A′、B′、C′的坐标位置以获取仿射系数:a1,a2......a6。检测图像中任何坐标点(x′,y′)可基于坐标系转换公式(6)与参考图像(x,y)一一对应。

图13 坐标系转换

在对FPC焊盘进行检测过程中,选用经本文算法处理焊盘的圆心或重心作为基准点进行坐标系转换以提高对焊盘的定位精度。图14为算法处理前后基准点的两种定位结果。

图14 基准点定位比较
通过图14的比较得到,通过本文的算法可以对目标进行准确的匹配,对焊盘的重心、圆心可进行准确的定位,当用于基于坐标系转换的检测目标定位,可有效地降低定位误差。
在生产现场的测试中,选取10000个以上的检测目标进行定位实验,经本文提出的算法处理后,定位误差的改善情况如表1所示(相机的分辨率为10.8μm/像素)。

表1 基于坐标系转换焊盘定位误差分析
5 实验分析
鉴于生产企业最小焊盘的制成宽度为100μm,焊盘与焊盘之间的最小间隔为100μm,当基于坐标系转进行初次定位时,平均误差控制在60μm之内基本满足应用需求(如表1所示),为后续的定位误差作进一步修正,检测目标的缺陷分析与检测,提高检测效率,提供了非常有利的条件。
6 总结与展望
为了提高图像配准精度,实现对基准点的准确定位,本文构建了方向熵函数提取焊盘的轮廓位置信息与轮廓方向信息。在此基础上通过模板对轮廓信息进行筛选,保留了正确的,有价值的轮廓信息,并最终实现对检测目标的匹配与对基准点的准确定位。影响图像配准精度的仍有机械振动、制造材料的热胀冷缩,光学镜头的畸变等原因,如何克服这些因素给图像配准带来的不良影响,则有待继续深入研究。
[1] Huang Jiexian,Li Di,Ye Feng,et al.Detection of surface defection of solder on flexible printed circuit[J].Optics and Precision Engineering,2010,18(11):2443-2453.(in Chinese)
黄杰贤,李迪,叶峰,等.挠性印制电路板焊盘表面缺陷的检测[J].光学精密工程,2010,18(11):2443-2453.
[2] Liu Wenxia,Zhang Yan,Shen Jingling,et al.Application of infrared thermography in PCB via quality detection[J].Laser&Infrared,2010,40(3):254-256.(in Chinese)
刘文霞,张焱,沈京玲,等.红外热成像技术在PCB板过孔质量检测中的应用[J].激光与红外,2010,40(3):254-256.
[3] Chen Chiuhui,Wang Chunchen,Lin Chunyu,et al.Realization of defect automatic inspection system for flexible printed circuit(FPC)[J].Proceedings of the 35th International MATADOR Conference,2007:225-228.
[4] Kyung-Jin Choi,Young-Hyun Lee,Jong-Woo Moon,Chong-Kug Park.Development of an automatic stencil inspection system usingmodified hough transform and fuzzy logic[J].IEEE Transaction on Industrial Electronics,2007,54(1):604-611.
[5] Hu Tao.Research of contour comparision-based defect inspection algorithm for bare PCB[D].Wuhan:Huazhong Univerisity of Science&Technology,2008.(in Chinese)
胡涛.基于轮廓对比的PCB裸板缺陷检测算法研究[D].武汉:华中科技大学,2008.
[6] Taniguchi Yoji.Digital image processing[M].Beijing:Science Press,2002.(in Chinese)
谷口庆治.数字图像处理[M].北京:科学出版社,2002.
[7] Huang Jiexian,Ye Feng,Dong ZhiJie,et al.Correction of FPC solder position error based onmutual information entropy[J].CircuitWorld,2011.37(1):46-51.
[8] Huang Jiexian,Yang Dongtao,Gong Changlai.Research on imagematch based on mutual information entropy and regional feature[J].Laser&Infrared,2013,43,(1):98-103.(in Chinese)
黄杰贤,杨冬涛,龚昌来.互信息熵与区域特征结合的图像匹配研究[J].激光与红外,2013,43(1):98-103.
[9] Ye Feng,Li Di,Huang Jiexian,et al.Flaw detection on FPC solder surface[J].Circuit World,2012,38(3):142-152.
[10]Liu Jinmang,Wu Zhonglin,Wang Jun.Method to estimate the trajectory of space target with infrared mono-station[J].Laser&Infrared,2011,41(10):1167-1171.(in Chinese)
刘进忙,吴中林,王君.运动红外单站跟踪空中目标的方向估计方法[J].激光与红外,2011,41(10):1167-1171.
Research on marker points locating in flexible print board based on directional entropy
YANG Dong-tao,HUANG Jie-xian,GONG Chang-lai,LUO Cong
(School of Electronic Information Engineering,Jiaying University,Meizhou 514015,China)
Location ofmarker points is an essential previous work in FPC(Flexible print board)automatic inspection process.The center of the FPC solder is selected asmarker point.Aiming to the solder’s deformation when locating themarker points,the concept of directional entropy is proposed to describe the distribution of inspecting objective contour’s direction,which is applied in extracting solder’s contour and directional feature.Then the contour similarity function is established.The valuable contour is reversed and adopted tomatch solder,andmarker’s location is also realized finally.Experiments show that the marker’s locating accuracy is improved,inspecting objective’s positioning error is reduced through image registration based on affine transformation,which is within 60μm.It is significant for practical applications especially the consequent inspecting work such as defect analysis and defect detection.
flexible printed;mark point;directional entropy;positioning error
TP391.4
A
10.3969/j.issn.1001-5078.2013.10.21
1001-5078(2013)10-1175-05
广东省自然科学基金项目(No.S2012010010368);2011年梅州市产业技术研究与开发资金计划项目资助。
杨冬涛(1981-),女,实验师,硕士,主要从事模式识别研究。E-mail:ydtsnail@163.com
2013-02-26
猜你喜欢
华中建筑(2022年4期)2022-04-14
计算机应用(2022年2期)2022-03-01
现代测绘(2021年1期)2021-04-28
计算机应用(2021年4期)2021-04-20
计算机应用(2021年1期)2021-01-21
装备制造技术(2020年1期)2020-12-25
制造技术与机床(2019年11期)2019-12-04
中国交通信息化(2017年4期)2017-06-06
小天使·一年级语数英综合(2015年2期)2015-01-14
全球定位系统(2010年2期)2010-07-18
