从准确、精确到精益求精
——载人航天推动运载火箭制导方法的发展
2013-05-14 13:00:05宋征宇
航天控制 2013年1期
宋征宇
北京航天自动控制研究所,北京 100854
运载火箭制导系统的任务是将有效载荷准确送入预定轨道。通常所说的制导实际包含了导航和制导两部分功能。火箭的入轨误差一般分为制导误差和非制导误差。制导误差又分为方法误差和工具误差①,前者主要指导航功能误差,惯性器件精度是其主要部分;后者主要指制导算法产生的误差。非制导误差是外部因素决定的误差,如发动机后效偏差、地面瞄准系统偏差等产生的误差,所占比例较小。
由于在很长一段时间里决定精度的主要因素是工具误差,所以火箭制导方法发展较为缓慢。随着技术的发展和要求的提高,降低工具误差的措施不断得到应用,如陀螺仪精度逐渐提高,以及采用卫星组合导航等,使得方法误差逐渐凸显出来。图1与图2是采用组合导航技术前后各类误差的分布情况。

图1 未采用组合导航

图2 采用组合导航
多年来我国运载火箭一直采用摄动制导方法,基本满足了准确入轨的要求。在交会对接等任务需求高精度入轨、且工具误差大幅降低后,从任务的总精度要求来看,如采用摄动制导方法,仅方法误差就已超出指标要求,于是在多年迭代制导研究的基础上[1-2],该项技术在我国载人运载火箭上首次得到了具体应用。
1 国内外运载火箭制导方法的发展
运载火箭在大气内的上升段制导均采用开环控制,原因是在大气层内约束较多,如气动载荷约束、一级残骸落点约束等,闭环制导的实施难度较大,同时大气层内飞行段制导的准确性对火箭最终入轨精度影响并不大,虽然国内外一些研究机构也开展了大气层内上升段制导方法的研究,但一直没有得到工程应用,研究的重点集中在真空段制导。
1.1 国外制导方法的发展
国外运载火箭真空段制导早期采用跟踪标准飞行轨迹的制导方法,在美国阿波罗计划中,根据任务需求为土星5火箭[3]研制了路线自适应制导方法,这是一种采用多项式拟合的方法,也是首次应用于运载火箭的自适应制导方法。在经过数次飞行之后,土星5火箭改用了更为先进的迭代制导方法(IGM),它是一种以燃料消耗最少为性能指标的最优控制方法,与多项式制导相比,迭代制导所需的飞行前计算的工作量小,能更好地适应任务和飞行器的变化。在航天飞机[4]任务中,对迭代制导方法又进行了优化,从平面二维制导扩展为空间三维制导,同时增加了多种故障处理中断模式,发展成为Powered Explicit Guidance(PEG) 。国外一些学者将土星5火箭的迭代制导方法称作第一代闭环最优制导方法,将PEG称为第二代,目前正在研究的多目标优化制导方法被称作第三代。
在此期间,俄罗斯和欧洲的运载火箭也先后发展出各自的自适应制导方法。
闭环制导具有很强的适应性,尤其在发动机故障的情况下,制导系统能重新规划飞行轨迹。在2012年10月,美国连续发生了两起火箭发射中发动机故障的情况,均因制导控制系统的上述能力使得任务仍能完成。同年10月7日,空间探索技术(SpaceX)公司的法尔肯9火箭发射龙飞船,在火箭飞行约79s后,火箭一级一台发动机异常,随后发动机关机。为保护其他发动机,发动机舱开始释放压力,其他8台发动机工作正常。“按照事先的设计,飞行计算机实时地重新计算出了新的上升轨迹(ascent profile),确保龙飞船进入轨道”[5]。同年10月4日,Delta 4发射GPS卫星(2F-3),上面级发动机(RL-10)推力异常下降,“但火箭的制导系统和飞行计算机对推力降低进行了补偿”[6],在剩余燃料的帮助下将卫星送入轨道。
1.2 国内制导方法的发展
国内火箭长期采用跟踪标准弹道的摄动制导方法,这是一种将目标函数在标准弹道附近泰勒展开,通过将目标函数与理论值的偏差控制为0,达到满足最终轨道根数要求的方法。摄动制导也从隐式导航到显式导航不断发展完善,满足了准确入轨的基本要求。摄动制导是一种偏差反馈控制,影响摄动制导精度提高的主要因素有以下几个方面。
1)导引量取决于导引系数,如导引系数采用某个参数的偏导数,则该参数会控制得非常好,入轨时该参数会有很高的精度,而其它参数的精度则相对差一些。因此,在导引系数设计时必须对重要参数、控制精度较为紧张的参数优先进行导引,如要精确控制多个参数难度较大;
2)摄动制导方法基于一阶泰勒展开,如考虑高阶项则复杂性明显提高,适用于高阶项可忽略的情况,所以干扰不能太大,应在线性范围内,否则导引精度下降;
3)泰勒展开点一般都选在关机点处,当弹道上不同点的一阶偏导数变化较大时不利于提高导引效果,即认为只有在弹道平稳的情况下,关机点的偏导数才能代表其它点的偏导数。
随着交会对接任务,我国首先在载人运载火箭上采用了迭代制导方法,考虑了球面引力场和三维制导,我国现役的其他火箭仍采用摄动制导,而新一代运载火箭都将采用迭代制导方法。
2 迭代制导的应用及其效果
2.1 迭代制导的主要原理
迭代法是一种逐步逼近的方法,它是求解代数方程、超越方程、微分方程时常用的一种基本而重要的数值方法,因其主要通过迭代不断求解最佳入轨点以及最优弹道,故被称作迭代制导方法。
迭代制导采用的性能指标为燃料消耗最少[1],因发动机推力和秒耗量基本固定,因此可表述为:
(1)
根据推力矢量方向(由箭体姿态决定),经数值积分可以估算出飞行过程中产生的速度、位置量。如果能将推力方向表示为一简单的函数形式(根据上升段轨道设计经验而总结出的规律,火箭最佳推力方向变化基本呈线性),则数值积分可以简化为相对简单的估算公式,从而实现箭上快速计算。
(2)
(3)
(4)

(5)
2.2 载人运载火箭迭代制导特点
1)通过对火箭后续能力的估算,在目标轨道上寻找最优的入轨点,而不是定点入轨,这一点可使入轨时速度与位置更加匹配,在发动机推力不可调的情况下对提高入轨精度有很大的帮助;
2)确立了基于等效近地点幅角(纬度幅角)估算入轨点的方法,算法简单,效果良好;
3)采用双向逼近的方法求解剩余飞行时间,即同时计算飞行弹道和目标轨道对剩余飞行时间的偏导数,同步逼近、达到快速收敛效果;
4)采用接力形式的全程寻优算法,一级摄动制导确保残骸落区,二级主机迭代、二级游机迭代,增大火箭的修偏和机动能力,全程寻优算法确保了燃料消耗最少;

6)在确保算法收敛性方面采取了大量安全性设计措施,包括关键数据滤波、限幅等常规措施,以及快速过载判断等手段,实现了迭代制导工程化。
2.3 迭代制导应用效果
2.3.1 提高入轨精度
表1列出了不同制导方案、制导方法的入轨精度(考虑了所有干扰和误差的总计),从表中可以看出,即使在采用了卫星组合导航的情况下,迭代制导对精度仍有较大的提升。

表1 不同制导方案与方法的精度对比
表2列出了摄动制导与迭代制导在无干扰以及典型干扰条件下精度的对比(仅列出部分方法误差的统计数据):在无干扰情况下,摄动制导也具有较高的精度;在干扰条件下精度受到影响。从中也可以看出影响摄动制导精度的主要因素。

表2 摄动制导与迭代制导精度对比
2.3.2 对发动机故障有较强适应性
迭代制导方法根据实时测量到的火箭加速度进行简化积分,并估算入轨点,对发动机推力变化非常敏感,当发动机推力变化以后,它能够重新规划出一条新的最优弹道。经数学仿真,迭代制导能够适应较大程度、多种形式的发动机推力异常:
1)接入时刻初值偏差仿真,如一级所有发动机秒流量偏差(最大-8%),助推器I,III或II,IV中各有一台推力为0等;
2)二级主机故障仿真,秒流量下降(最大20%),比冲下降(最大20%),关机前下降(50%),随机下降(发生时刻随机;持续时间随机,最大100s;下降幅度随机,最大30%);
3)二级游机故障仿真,秒流量下降(最大50%),比冲下降(最大50%),关机前下降(50%),随机下降(发生时刻随机;持续时间随机,最大30s;下降幅度随机,最大30%);
4)过载测量误差,惯组测量结果是实测结果的50%~150%(仅指迭代制导算法的输入数据不准确,导航结果由组合导航保证)。
在上述情况下,算法均收敛(即使发动机比冲发生变化,仅影响关机时间的预测和飞行程序角,不影响算法的收敛性,因为每个周期都要从当前点重新规划和修正),且只要运载能力具备,入轨精度满足要求。为进一步说明问题,假设载人运载火箭在79s一级发动机中的一分机发生故障导致关机(及失去推力),计算结果如下:

表3 不同制导方法在一子级一分机故障下的入轨精度对比
如果俯仰姿态角采用限幅措施,Δω会有所超标;如果取消限幅,精度能够满足要求。摄动在这种故障情况下误差大大增加了,虽然最终速度达到了半长轴关机的条件,但导引能力不足以消除位置上的偏差,近地点低了44km,未能进入预定轨道;在空气阻力等影响下,轨道会下降得较快。从推进剂的剩余量看,迭代制导会消耗更多的推进剂,尤其是氧化剂,比摄动多消耗了255.4kg(325.3-69.9),与理论值相比多消耗了291.2kg(361.1-69.9)。但这仅是在发动机故障下、因弹道重新规划而导致推进剂消耗增多;多消耗的推进剂与故障下仍将有效载荷送入轨道相比,其代价还是值得的。同时,在发动机正常情况下,即使有各种干扰,迭代制导消耗的推进剂与摄动相比,差别基本在25kg以内,图3绘制了85种干扰条件下燃烧剂、氧化剂剩余总量的偏差图。
图3 无故障飞行不同条件下迭代与摄动燃烧剂、氧化剂剩余总量偏差图
故障下多消耗推进剂在美国龙飞船的发射中也得到了体现,由于火箭一级故障,需延长剩余发动机工作时间来保证完成空间站补给任务,最终造成火箭二级二次点火燃料余量未达到NASA安全规定(NASA要求完成二级二次点火的可靠性需达99%以上,而此次任务中仅达到95%)而放弃了二次点火,其第二有效载荷OG2卫星被迫置于203km×323km的轨道上[5],最终坠落回地球。
2.3.3 实际飞行结果
我国迭代制导首次应用于发射“神舟八号”飞船任务,在神九的发射中也得到了应用,其入轨精度也达到历史最高水平,实现了精确入轨。图4是一期、二期技术指标要求及实际飞行结果对比,表4是载人运载火箭历次发射方法误差的对比。
图4 入轨精度对比

轨道参数偏差Y4Y5Y6Y7T1Y8Y9Δa(m)-2010054119.42.52.4-1.2Δhp(m)20-91064511737.270.71.94Δi(°)0.0070.0160.0010.02-0.000350.0002-0.0003Δω(°)-0.090.66-0.425-0.122-0.1546-0.030.002ΔΩ(°)0.02-0.020.03-0.1030.01140.00090.001
2.4 迭代制导的局限性
迭代制导入轨姿态散布较大。迭代制导对质心运动的控制需通过火箭姿态的调整来实现,当干扰增大时,实际入轨姿态与理论入轨姿态有较大偏差。

表5 一期入轨姿态偏差及实际值
表6 二期入轨姿态偏差及实际值
对于某些在入轨后需要快速定向的有效载荷,将产生一定影响。为此需要研究在精确入轨的同时如何保证姿态约束的要求。
3 未来交会对接任务制导方法的改进
3.1 对零窗口的适应性
飞行弹道基本确定的情况下,起飞时刻决定了轨道的升交点赤经,因此要 “零窗口”发射。但这大大增加了对火箭发射可靠性的要求,出现任何影响后续流程的问题将很可能导致本次发射无法实施。同时“零窗口”保证的是点火时刻,距火箭真正起飞时刻还有一定的随机性,也会引入一定的误差。
未能按时起飞主要影响5个轨道根数中的升交点赤经,该参数在飞行控制的诸元中被转化为升交点经度,即起飞时刻目标轨道与地球赤道交点的经度。显然,随着地球的转动,目标轨道与地球赤道交点的经度也在不断变化。如图5所示,假设原定起飞时刻目标轨道的升交点经度为Ω1,发射点的经度是Ω0,则可以近似地认为飞行过程中要转动dΩ=Ω1-Ω0;如果推迟起飞Δt,地球转动ωΔt,其中ω为地球自转的角速度,发射点也转动了相同的角度,此时目标轨道的经度变为Ω1′=Ω1-ωΔt。但因为发射点与地球固联,其经度仍为Ω0,此时按照装订的诸元转过dΩ,其经度为Ω0+dΩ=Ω0+Ω1-Ω0=Ω1=Ω1′+ωΔt,而Ω1′才是时间推迟后需要达到的经度,因此误差为ωΔt。
如果在起飞时刻利用卫星导航系统完成起飞时间的准确采集,然后根据原起飞时刻确定的目标轨道参数自动转换成对应实际起飞时刻的轨道参数(其实仅修正升交点经度一个轨道根数),采用箭上自主修正制导参数、生成飞行弹道的方法,将轨道根数的变化,以及由于起飞时间偏差造成的轨道面误差统一消除,从而可以取消“零窗口”的限制。
按照现有的方法,如果推迟24s,即使各种控制误差均为0,也不能满足赤经0.1°的误差要求。
采用上述方法,以发射飞船轨道为例,如果射向不变,仅在二级使用迭代制导修正起飞时间造成的轨道面变化,可以修正升交点经度±2°的变化,相当于允许起飞时间与理论时间偏差8m,由此增加的燃料消耗大约为480kg;若再增大,按预定射向发射将极大地损失运载能力甚至无法实现。
为解决推进剂消耗量大的问题,采用全方位发射技术实现射向变更,不仅增大升交点经度的变化范围,还可以增大对轨道倾角变化的适应性(在内陆发射场要考虑运载能力和对火箭残骸落区的影响)。
图5 地球自转对入轨精度的影响
3.2 带姿态约束的迭代制导方法研究
如果要解决2.4节提出的姿态偏差过大问题,可以在主动段结束前停止迭代,利用大推力发动机(相对于几十到上百牛的调姿喷管)进行调姿。
1)根据迭代制导程序角的变化规律预测调姿初始时刻姿态;
2)由于调姿终段的姿态角是已知的,由此可以预估调姿造成的视速度增量;
3)将入轨所需速度增量扣除调姿所造成的速度增量作为迭代终端所需的速度增量,对飞行程序角进行重新规划;
4)根据新的飞行程序角计算入轨参数、调整入轨时间和入轨点,并反馈到第1)步修正调姿初始时刻姿态,反复迭代。
图6分别仿真了要求终端俯仰姿态角为-5°和-15° 两种情况。由于估算出末端调姿的影响,所以在调姿之前的飞行段程序角也发生了相应的变化,但变化量不大,最终以期望的姿态入轨,两种状态下的轨道根数精度也基本令人满意。
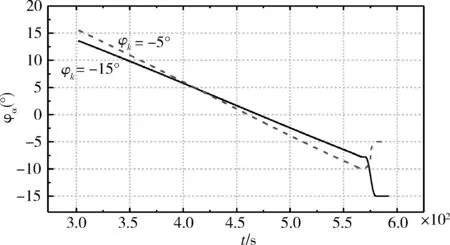
图6 入轨前增加调姿段的弹道姿态角仿真曲线
该方法受到入轨姿态估计精度的影响,在距关机点较远的时刻,迭代终端姿态的估计精度不高,可能会导致火箭初期并没有按照最优的姿态飞行,从而造成不必要的燃料损失。同时,预估调姿造成的视速度增量需要用到火箭入轨前的视加速度,目前算法中用理论值替代也会影响一定的精度。
3.3 多终端约束闭路制导的工程化解决方案
姿态约束只是多终端约束闭路制导的一个特殊的应用。针对这类问题的求解,一般的方法可以分为直接法和间接法2种[7]。间接法的解题思路是:
1)推导出与推力(加速度、速度和位置)相关的解析表达式;
2)构造或设计出与推力、各种约束条件(入轨参数、姿态和载荷等)相关的方程;
3)将推力表达式代入方程进行求解。
第1)步与最优控制相关,第3)步与数值计算相关,目前第2)步是研究最为活跃的部分。同时,针对不同的需求,推导出的方程也不尽相同,没有一个通用的处理方案。
直接法更多地是将这类问题看作纯数学而非控制问题。如果能够快速地计算出每个节点火箭需要的速度和加速度,且能够满足各种过程约束和终端约束条件,则至少找到了一个解。虽然有可能不是最优解,但在工程上是可接受的。如不满足要求,采用某种寻优的方法对所有节点控制变量(可能成千上万)进行调整。这样的计算在每个控制周期内迭代进行,能不断修正各种偏差和适应包括故障在内的各种突发情况。显然,直接法计算量很大,按现有飞行计算机的能力是无法在飞行中实时解算的。
很显然可以找到二者结合的方法,暂且称作“直接-间接融合算法”,即利用间接法中最优控制的结果来减少求解的变量,然后用直接法对这些变量进行求解,在一定运算速度和算法的支持下能够解决此类问题。
例如,假设推力方向的表达式如下所示[8-9]:
(6)
λ(τ)共6个量,前3个表征推力方向。在已知初值(当前值)λ0的情况下,可以计算出任何时刻的推力方向,进而根据各点推力方向积分计算各点速度和位置。 从这里可以看出,因为后续任何时间的状态均是由当前状态决定的,将原本直接法中每个节点控制变量的求解转化为一个节点(即当前周期)的求解,使得计算量急剧缩减;同时由于当前周期能够调整的仅是3个推力方向,受到发动机摆角限制、箭体因自身惯性导致的转动速率的限制等,这3个量的变化范围也是受限的,这就限定了寻优的范围,使得问题进一步简化。当然,从推力方向转化成速度和位置需要大量的积分运算,如果能够提高积分运算速度,将为直接法在实时飞行控制中的工程化应用带来可能。
4 结束语
随着航天技术的发展,运载火箭承担的任务呈
现多样性,应重视制导方法的研究。载人航天工程交会对接任务促进了迭代制导在我国运载火箭上的成功应用,但对任务的通用性还不够,因其推力矢量的表达形式难以同时满足多种附加条件。而同时要将复杂的轨迹规划过程放到箭上实现,还需要箭上计算机水平的快速发展作为支持。因此制导方法的发展,离不开型号牵引和火箭信息技术整体水平的提升。
注①:某些飞行器采用图像匹配制导等方法后,工具误差和方法误差的定义已与上述不完全相同。
[1] 吕新广,宋征宇.载人运载火箭迭代制导方法应用研究[J].载人航天,2009(1):9-14.
[2] 陈新民,余梦伦.迭代制导在运载火箭上的应用研究[J].宇航学报,2003(5):484-489.
[3] Walter Haeussermann.Guidance and Control of SATURN Launch Vehicles[J].AIAA Second Annual Meeting.NASA MSFC, AIAA Paper No.65-304, 1965.
[4] R.L.McHenry, et al.Space Shuttle Ascent Guidance, Navigation, and Control[J].Journal of the Astronautical Sciences.1979,27:1-38.
[5] Orbcomm Craft Falls out of Orbit[N].SPACE NEWS,2012,23(40):4.
[6] RL-10 Investigation Delays USAF Spaceplane Mission[J].SPACE NEWS.2012,23(42):8.
[7] 唐国金,罗亚中,雍恩米.航天器轨迹优化理论、方法及应用[M].科学出版社,2012.
[8] P.Lu and B.J.Griffin.Rapid Optimal Multiburn Ascent Planning and Guidance.Journal of Guidance, Control, and Dynamics.2008,31:9.
[9] 火箭高精度入轨技术,载人航天空间站工程预先研究课题结题报告[Z].2012.
猜你喜欢
学生天地(2020年3期)2020-08-25 09:04:16
汽车观察(2018年9期)2018-10-23 05:46:40
中国自行车(2018年8期)2018-09-26 06:53:44
少儿科学周刊·儿童版(2017年1期)2017-03-29 13:33:34
少儿科学周刊·儿童版(2017年1期)2017-03-29 13:28:46
北京航空航天大学学报(2016年9期)2016-11-16 02:02:36
北京航空航天大学学报(2016年7期)2016-11-16 01:51:00
小朋友·快乐手工(2016年5期)2016-05-14 17:18:34
北京航空航天大学学报(2016年4期)2016-02-27 06:32:09
小朋友·快乐手工(2015年10期)2015-11-02 00:25:26