
实时声波二维成像系统设计
2013-05-03 11:03单鸣雷韩庆邦谢祖锋朱昌平
实验技术与管理 2013年6期
李 响,单鸣雷,韩庆邦,谢祖锋,朱昌平
(江苏省输配电装备技术重点实验室,常州市传感器网络和环境遥感重点实验室,河海大学 计算机与信息学院,江苏 常州 213022)
超声声波在介质中的传播是一个比较复杂的过程,传统研究方法大多基于简单的介质参数、采用波动方程计算并仿真出声波传播规律,为工程应用提供理论支撑和先验模型[1-3]。而对于复杂的声波介质,如组成成分复杂的介质、多孔介质等,难以通过数学表达式准确地将声波的传输特征表达出来,故难以得到供工程应用的直观的先验模型[4-6]。因此论文设计了实时声波二维成像系统,通过在待测介质中激发出超声波体波,采用扫描的方法获得体波在介质中传播的动态图像[7]。该系统可为复杂介质中声波的传播规律和特点提供直观的先验模型。
1 检测原理
超声波激励示意图见图1,灰黑色薄板为待测物体切片,白色部分为超声波发射换能器。当薄板厚度和换能器长度尺寸H可比拟的时候,能在薄板中较好的激励出超声波,用涂有耦合剂的接收换能器在物体表面检测,就能可视化地检测到体波在物体内部的传播规律[8-9]。

图1 超声波激励示意图
本文设计的成像系统的二维成像原理如图2所示,图2(a)为被测薄板俯视图,图中T为超声波发射换能器,物体表面上的黑点代表超声波接收换能器测量的位置(图中仅列出5个),在该平面上有这样的检测点xmax×ymax个。采用右侧脉冲波形激励超声换能器T,使之发射超声波。声波在薄板中传播,到达接收换能器所在的位置A,可观察到A点的时间-声压波形。脉冲信号和声压信号波形见图2(b)。
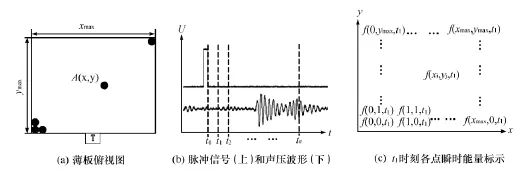
图2 二维成像原理
规定激励脉冲下降沿时刻为t0,每隔单位时间Δt后有t1~tn时刻。就任意点A而言,在每一单位时刻具有瞬态能量f(t)。现在考虑t1时刻薄板上的任意一点A(x,y),在该点存在瞬时能量f(x,y,t1),如图2(c)所示,按照成像原理,可认为薄板上有xmax×ymax个像素点,将各点瞬时能量作为灰度值,可绘制出t1时刻瞬时超声波形图。同理,可以得到t2~tn时刻的瞬时波形图,若连续观察各连续时刻的瞬时波形图,则将得到声波在被测物体中的实时传播波过程。
2 系统设计
2.1 系统框图
基于上文中提出的检测原理,综合应用机械、电子和计算机接口等相关技术,设计了图3所示的检测系统。其中,计算机端的上位机软件,通过RS232串口向微控制器发布一系列控制命令,实现了由双轴丝杆滑台带动超声波接收换能器精确移动到各超声成像像素点;微控制器亦能控制超声发射和采集电路,将各像素点的声波信号转换为数字量,传输给上位机;上位机最终根据各像素点的采样值输出成像。
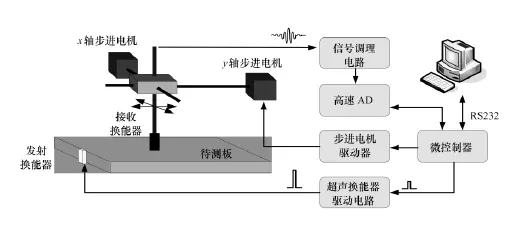
图3 系统结构框图
系统的工作流程图如图4所示。在系统上电完成后,上位机选定并打开一个串口,作为和下位机通信的链路。上位机通过发送控制方向帧(CMD_DIR)和设置初始位置帧(CMD_LSTR)控制接收换能器移动,以确定图2中的像素坐标原点(0,0),并以同样方法设置像素坐标终点(xmax,ymax)。之后,上位机通过自动运行帧(CMD_AUTO),让下位机进入自动采集状态。下位机在自动运行状态下,不断返回当前位置(x,y)以及该位置的采样值序列f(x,y,t0)~f(x,y,tn)。最终,计算机根据采样值绘制出各时刻的波形图。
2.2 系统主要部分设计
2.2.1 超声波发射和接收电路
针对不同厚度的待测薄板,需要尺寸上与之匹配的换能器,才能得到较好的效果。而换能器的尺寸和工作频率之间又存在一定的关系,因此所设计的超声波收发电路,应具有一定的工作带宽。图5(a)是超声波发射电路,选用了驱动容性负载性能较好的TPS2811作为超声波发射换能器驱动器,该驱动器的图腾式输出达2A,最高工作频率可达到10MHz(方波),能胜任本系统的要求。
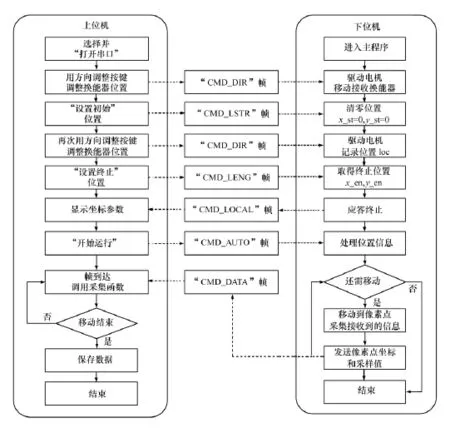
图4 系统软件流程图
超声波接收端电路如图5(b),采用单位增益带宽50MHz的高速运放AD827作为信号放大单元。因驱动电路已具有较大的输出功率,接收换能器能输出较强的电信号,因此只设计了一级放大电路。接收电路还搭配了采样率为20MHz的8位并行高速AD转换器TLC5510A。
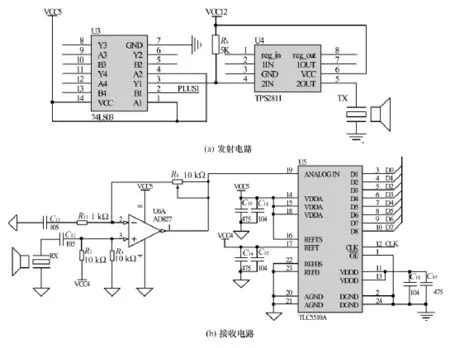
图5 超声波收发电路
2.2.2 上下位机通信接口
综合考虑该装置数据量、系统任务量后,下位机的控制核心选用了ATMEL公司的ATmega16单片机。它和上位机软件之间的字节流由RS232保证。为了进一步保证通信质量,实验中自定义了如表1所示的通信协议帧格式。其中命令字段和数据字段包含了诸如移动坐标、产生超声波激励信号、回馈采样值等信息。命令字定义了图4中的7种帧,每种帧格式中包含了与之对应的数据位长和数据位内容,校验位字节用以对数据帧检错。对协议帧的解析通过状态机来实现。图6是状态机的状态切换图,默认处于IDLE状态,仅当获取了2个正确的引导码后才能进入STATE2状态,并根据命令字和数据位作进一步解析,最终正确解析命令和收发数据。

表1 通信协议帧格式
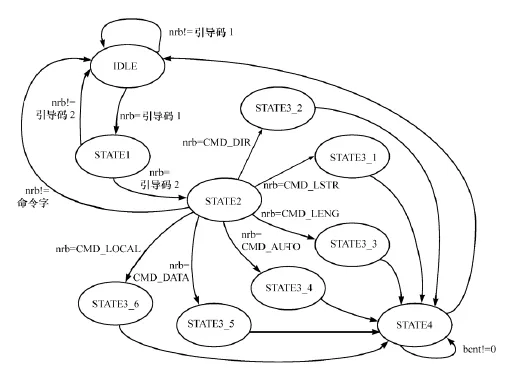
图6 状态切换图
2.2.3 双轴丝杠滑台
由成像原理可知,单位尺寸上像素点越多,则成像分辨率越高,因此,在设计中,采用丝杠滑台来精确控制超声波接收换能器的微距移动,减小像素点间距,提高分辨率。
设计中的滑台由结构完全相同的两组装置组成,分别控制了接收换能器在x轴和y轴方向上的精确移动。每一组装置均由一个步进电机带动丝杠传动工作台移动[10-12]。系统中,滑台的负载为质地较轻的超声波换能器,因此选用了扭矩较小的二相混合式步进电机42BYG023,该电机最小步距角为1.8°,结合丝杆的传动比,能控制超声波换能器沿任意轴向移动的最小步距为0.1mm。
3 实验结果和分析
实验采用厚为7mm的有机玻璃板为检测对象,成像区域约为20mm×20mm,选用中心频率约为200kHz的压电超声波换能器作为超声波发射源。
上位机控制成像时间间隔△t为2μs,将数据保存在磁盘中,通过程序与Matlab接口,由Matlab绘制出各时刻的检测波形,如图7所示。图7(a)中能观察到头波波峰抵达成像区域,图7(b)中头波的波谷抵达成像区。从图7(a)—(d),反映出头波在传播过程中有明显的衰减。因实验中选用的超声波换能器的Q值较大,故从成像中能观察到较多的余震(因篇幅关系,并未列出所有的波形图)。
4 结束语
本文设计的实时声波二维成像系统,通过在待测介质中激发出超声波体波,采用扫描的方法获得体波在介质中传播的动态图像。该系统能直观地表现出难以用理论公式和仿真模型来表述复杂介质中的声波传播规律,能为构建声波在复杂介质中传播的工程应用模型提供基础条件。
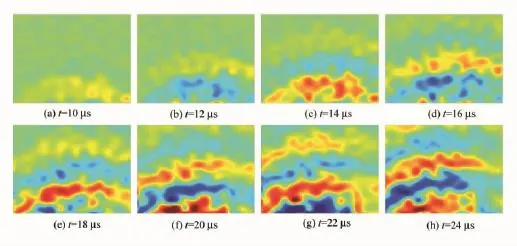
图7 超声波在有机玻璃中的传播过程
致谢:特别感谢天津大学的沈建国老师悉心指导,教授我们以相关的理论知识,并提供用于本实验的两自由度丝杠滑台。
(
)
[1]杜功焕,朱哲民,龚秀芬.声学基础[M].南京:南京大学出版社,2001.
[2]冯若.超声手册[M].南京:南京大学出版社,2001.
[3]李家伟,陈积懋.无损检测手册[M].北京:机械工业出版社,2002:28-30.
[4]贺文静,刘国强,张洋,等.感应式磁声成像声场正问题研究(一):基于声压-速度耦合方程的声场模拟方法[J].现代科学仪器,2010,2(1):9-13.
[5]刘国强,贺文静,夏慧,等.感应式磁声成像声场正问题研究:基于位移方程的声场模拟方法[J].现代科学仪器,2010,2(1):14-16.
[6]李衍.相控阵超声检测国际动态[J].无损检测,2009,31(1):56-60.
[7]Treece G,Lindop J,Gee A,et al.Near-real-time 3DUltrasonic Strain Imaging[J].Acoustical Imaging,2009,29(1):27-32.
[8]R/D Tech Inc.Introduction to Phased Array Ultrasonic Technology Application[M].R/D Tech Inc,2004.
[9]沈建国.应用声学基础:实轴积分及二维谱技术[M].天津:天津大学出版社,2004.
[10]陈飞,易春峰.两自由度步进滑台点位控制系统设计[J].机床与液压,2009,37(1):133-135.
[11]丁金华,孙秋花,李明颖,等.基于嵌入式微处理的两自由度数控滑台的研制[J].实验室技术与管理,2008,25(6):43-45.
[12]李雄兵,胡宏伟,倪培君,等.基于图像处理的超声探头声场测量[J].工程图学学报,2011(4):27-30.
猜你喜欢
汽车实用技术(2022年15期)2022-08-19
机械工程师(2021年12期)2021-12-22
佳木斯大学学报(自然科学版)(2021年6期)2021-12-21
数学物理学报(2021年3期)2021-07-19
重型机械(2020年2期)2020-07-24
机械管理开发(2018年2期)2018-03-16
声学与电子工程(2017年1期)2017-06-22
声学与电子工程(2017年1期)2017-06-22
焊接(2016年5期)2016-02-27
雷达与对抗(2015年3期)2015-12-09
