
红外光幕在地铁屏蔽门障碍物探测中的研究
2013-04-21 01:55:40王瑞峰杨子河孔维珍
传感器与微系统 2013年3期
王瑞峰,杨子河,孔维珍
(兰州交通大学 自动化与电气工程学院,甘肃 兰州730070)
0 引言
现有地铁屏蔽门(PSD)障碍物探测系统主要用于障碍物的探测方法是将门速曲线中预期的电机电流和测量到的电机电流进行的对比而判断障碍物的所在,任何门速的改变都可以通过门控制单元(door control unit,DCU)中的微控制器使用标准电动机电流去计算障碍物对门施加的压力,从而探测障碍物所在。当探测到障碍物存在时,微控制器会启动指定的障碍物探测程序来控制屏蔽门的开关状态。该控制方案存在以下不足[1]:
1)屏蔽门障碍物探测系统系统所能探测到的最小障碍物的尺寸为4 mm×40 mm,对于这类障碍物,通过门速曲线的改变来探测已经不能满足精度的要求,如果将精度调高了,当门的实际速度曲线与设定速度曲线不符合时,又会影响门机控制单元对电压的校正功能。这样就很难找到一个既能满足精度要求又能不影响预设门速曲线的平衡点。
2)通过门速度曲线探测障碍物方法中预期电机的电流对应于一定的夹紧力,在地铁验收过程中使用4 mm×40 mm的钢条来检测的目的就是通过钢条的刚性来感知该钢条对屏蔽门施加的压力。而对于质地较软的障碍物,就不能通过该方法进行探测,当有衣服、领带、背包带、皮革等障碍物存在时,就容易造成安全隐患。如上海地铁的1#,2#线屏蔽门中,大部分预期电机电流设置较高,该部分屏蔽门基于欧洲应用交通环境生成,适应于客流不拥挤的情况,在国内应用后屡屡发生夹人事故[2]。
红外光幕是通过控制系统同时控制红外发射器发送信号和红外接收器接收信号,并将接收管探测到的信号反馈给控制系统,这样就形成一个保护回路。如果该回路出现故障,红外光幕就会发出报警,因而,它是一种失效安全的保护装置[3]。本文利用红外光幕设计了一种适合屏蔽门障碍物探测的方案,并结合数字信号处理器(DSP)的无刷直流电机控制技术和模糊PID控制算法,完成屏蔽门障碍物探测的设计,为进一步研究该方案的可行性应用提供了有效的科学依据。
1 红外光幕探测原理
构成红外光幕的红外光束示意图如图1所示,其中,图1(a)为直线扫描模式下的光束示意图;图1(b)为交叉扫描模式下的光束示意图。
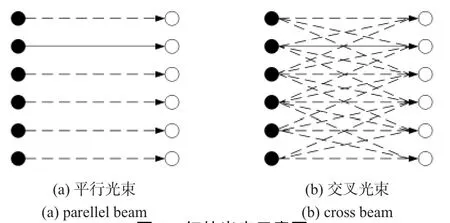
图1 红外光束示意图Fig 1 Diagram of infrared beams
在直线扫描情况下,控制系统只接收与红外发射管相对应的红外接收管的信号。当控制系统以一定的周期对每一对红外发射管和红外接收管进行循环扫描时,就形成了一条条平行的红外光束组成的红外保护光幕。该情况下平行光束之间的距离,即为扫描盲区。由于红外发射管的出射光不是像激光一样的直线,而是有较大的发射角,虽然与之对应的接收管接收到了其中的一条或多条光束,但其余光均能投射在相邻的一组或多组红外接收管上,若在一个红外发射管发射时,控制多个红外接收管依此接收该发射管发射的光束,并周期性地对每条光束进行循环扫描,就形成了图1(b)所示的交叉扫描方式。直线扫描方式由于光束少而存在较大扫描盲区,而交叉扫描方式有了交叉光束,就可以用较少的红外发射管和红外接收管,组成较密集的保护光束,有效地减少了探测盲区,形成一道隐形的红外保护光幕。
图2给出了相邻2对发射管互不干扰条件下的光束示意图。
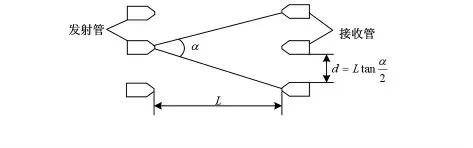
图2 相邻2对发射管互不干扰条件Fig 2 Conditions of two pairs adjacent transmitting tube without mutual interference
当已知发射管的发射角为α,发射管与接收管之间的距离为L,则可以通过式(1)推导出2组红外光对射管互不干扰的最小距离d,即

另外,在已知发射管直径Φ的前提下,可以计算出安全光幕的分辨率为

式中D为安全光幕所能探测到的最小障碍物的尺寸。
红外光幕的红外发射和接收通路数目理论上最大可有215个[4],考虑到地铁屏蔽门的高度和红外光幕上下通路之间的间距,一般不会超过64个;而地铁屏蔽门的有效探测区域为1 900 mm(宽)×2 000 mm(高),故红外光幕能探测到的最小障碍物直径约为30 mm。
2 地铁屏蔽门障碍物探测系统设计
2.1 屏蔽门障碍物探测系统硬件结构设计
地铁屏蔽门障碍物探测系统硬件结构如图3所示。
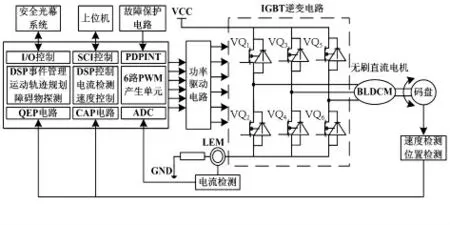
图3 屏蔽门障碍物探测系统硬件结构Fig 3 Hardware structure of platform screen door obstacle detecting system
其工作原理为:在屏蔽门关门过程中DSP通过I/O口一方面控制红外光幕执行障碍物探测功能,另一方面采集红外光幕系统中障碍物的探测信号,并根据所采集的信号,通过其内部的事件管理器选择所需速度曲线,与此同时,DSP还通过捕获单元捕捉霍尔传感器所探测的转速脉冲信号的宽度[5],从而计算出电机的转速,并与所选速度曲线比较后,利用模糊PID控制算法产生合适的正弦波脉宽调制(SPWM)信号,给驱动电路提供合适的驱动逻辑电平,控制电机的转速跟随所选速度曲线的设定值进行平滑调速;此外,DSP还经I/O和A/D口采集外部输入信号(如过电流保护信号、过电压保护信号、过温保护信号),实时控制电机的运转状态,当采集到系统运行异常时会及时中断电机运行并发出声光报警提示;以及通过SCI口将系统的状态信息通过CAN总线传输给上位机,为系统提供远程监控的窗口。
2.2 系统控制策略的设计
系统软件实现全数字双闭环控制,内环是电流环、外环是速度环。其中,速度环控制器采用模糊PID控制算法;电流环控制器采用PID控制算法;这样就可以使电流紧紧跟随速度控制器的输出,防止系统扰动。系统中PWM占空比的控制量是先通过给定转速与速度反馈量比较后形成偏差,经速度环控制器调节后产生电流参考量,然后与电流反馈量比较并形成偏差,最后经电流环调节器调节后形成。系统通过速度环的模糊PID控制算法和电流环的PID控制算法的有效结合,使系统具有较强的鲁棒性和适应性,确保速度主被控量的控制质量[6]。系统控制策略框图如图4所示。
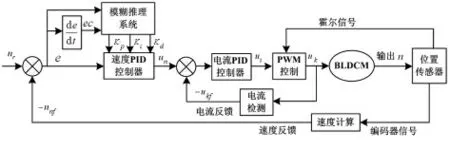
图4 系统控制策略框图Fig 4 Block diagram of system control strategy
2.3 模糊控制器设计
从图4可以看出:速度环控制器的给定转速值nr和反馈转速值nnf的偏差e和偏差变化率ec作为模糊控制器的输入,并利用模糊规则进行模糊推理,对在线PID参数进行修改,然后,以Kp,Ki,Kd作为输出,并通过速度PID控制器产生电流参考量,与电流环的反馈值比较和形成偏差,从而实现电流环的PID控制。在运行中系统自动找出PID与偏差e和偏差变化率ec的模糊关系,并不断检测e和ec,再根据模糊控制控制原理对这3个参数进行在线修正,以满足不同的e和ec下被控过程对ΔKp,ΔKi,ΔKd的要求。
在建立模糊规则时,可将速度偏差e和偏差变化率ec量化为7个模糊子集,即模糊语言变量={负大,负中,负小,零,正小,正中,正大},简记{NB,NM,NS,ZE,PS,PM,PB}[7]。综合考虑速度偏差e和速度偏差变化率ec这2个信号,可采用如下的模糊推理规则:
if Eis NB and EC is NB then Kpis PB,Kiis NB,Kdis NS.
由于e和ec各有一个模糊子集。所以,共有49条模糊规则,其具体规则如表1所示。
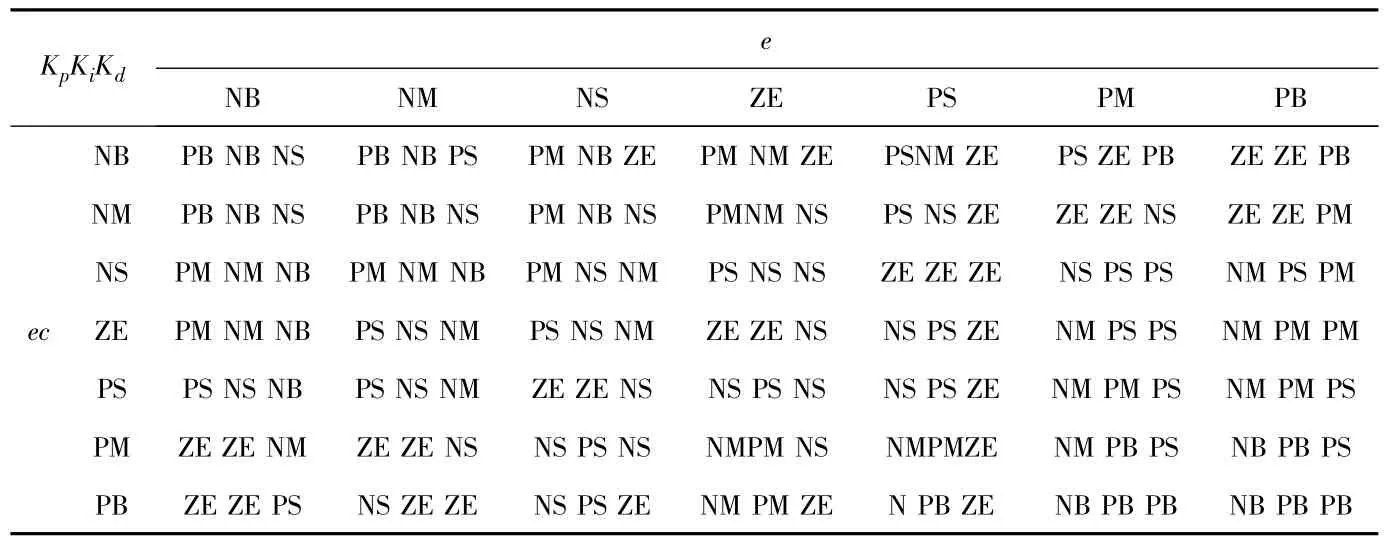
表1 模糊控制规则表Tab 1 Fuzzy control rules table
Kp,Ki,Kd的模糊控制规则表建立好后,可采用加权平均法计算出输出量ΔKp,ΔKi,ΔKd的确定值,并代入式(3)计算

式中Kp0=0.5,Ki0=0.03,Kd0=0.1为用工程经验法整定出的初值。
在连续时间域上,PID控制器具有如下形式[8]
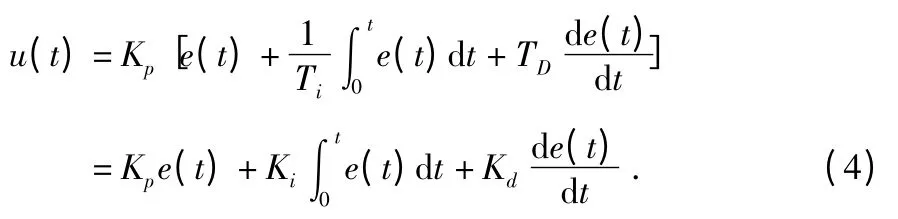
将式(4)离散化,用宽为Td,高为e(iTd)(i=0,1,2,…,Td为采样间隔)的小矩形面积和近似代替积分,可得离散线性PID控制器的递归方程为


式中Kpd=Kp,Kid=KpTd/Ti和KDd=KpTd/TD分别为相应的比例、积分、微分增益常量。
PID控制器的离散形式式(5)不易于实现,因为它包含所有以前时刻的控制误差值求和,较好的解决办法是采用增量式作为控制器的输出,即

式中un为速度控制器输出的控制量,Ki=KpT/Ti,Kd=KpTd/Ti,T=10 ms。
在线性运行过程中,控制系统通过逻辑运算得出Kp,Ki,Kd的值并完成对PID参数的在线自校正。
3 系统仿真结果与分析
在本系统中,通过Matlab/Simulink工具中的功能模块和C MEX S函数及子系统封装等模型优化技术构建了系统主要控制模型,包括速度给定模块、模糊PID控制模块、电机控制模块,PWM发生模块、功率驱动模块、无刷直流电机的模快、反电动势模块等,通过这些模块及其函数构建出地铁屏蔽门障碍物探测系统模型,并对系统正常关门过程和遇障碍物时的关门过程进行仿真。系统所用无刷直流电机的仿真参数如表2所示。
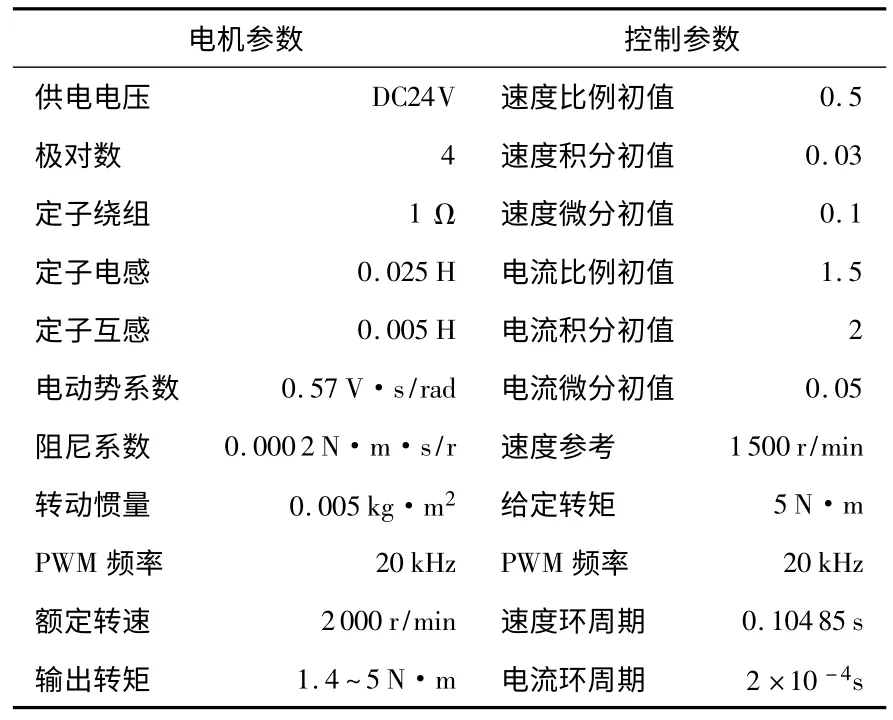
表2 无刷直流电机模型仿真参数Tab 2 Simulation parameters of BLDCM model
系统的仿真结果如图5所示。从图5(a)中的系统正常关门时的速度曲线中可以看出:使用传统PID对系统进行控制时的超调量比使用模糊PID控制时的超调量要大,超调时间(传统PID控制为1 194 ms,模糊PID控制为598 ms)也要高出近1倍,而超调量和超调时间是评定一个闭环实时控制系统“稳、快、准”的关键指标。在屏蔽门障碍物探测系统中采用模糊PID控制算法不仅提高了系统对无刷直流电机的控制精度,另一方面,由于系统的响应时间的缩短,也节约了障碍物探测过程所需的时间,从而间接地提高了障碍物探测的精度;另外,从整个曲线可以看出:使用模糊PID控制时,系统能够很好地跟随给定速度曲线进行调速控制。图5(b)给出了系统在遇到障碍物且障碍物一直存在时的关门速度曲线的仿真图,该曲线主要通过编程实现速度的给定来验证系统在遇到障碍物时的关门流程,从而证明系统在遇到障碍物时能通过运行障碍物探测程序实现障碍物的智能探测。
4 结束语
本文在分析现有地铁屏蔽门障碍探测系统所存在的不足和安全光幕探测原理的基础上,提出采用安全光幕进行地铁屏蔽门障碍物的探测方法来解决对尺寸小于4 mm×40 mm的细软障碍物探测的不足;同时,结合DSP的控制技术和模糊PID控制算法实现整个屏蔽门障碍物探测系统的设计,重点对模糊PID控制器的设计进行了研究;最后,在Matlab/Simulink环境中构建了整个系统的数学模型,并对系统在正常情况和遇到障碍物时的关门过程进行仿真分析。仿真结果表明:与传统PID控制相比,模糊PID控制具有较小的超调量和超调时间,而且系统能很好地跟随给定速度进行调节控制,不仅满足了实时控制系统“稳、快、准”的要求,而且还间接提高了地铁屏蔽门障碍物探测的精度。
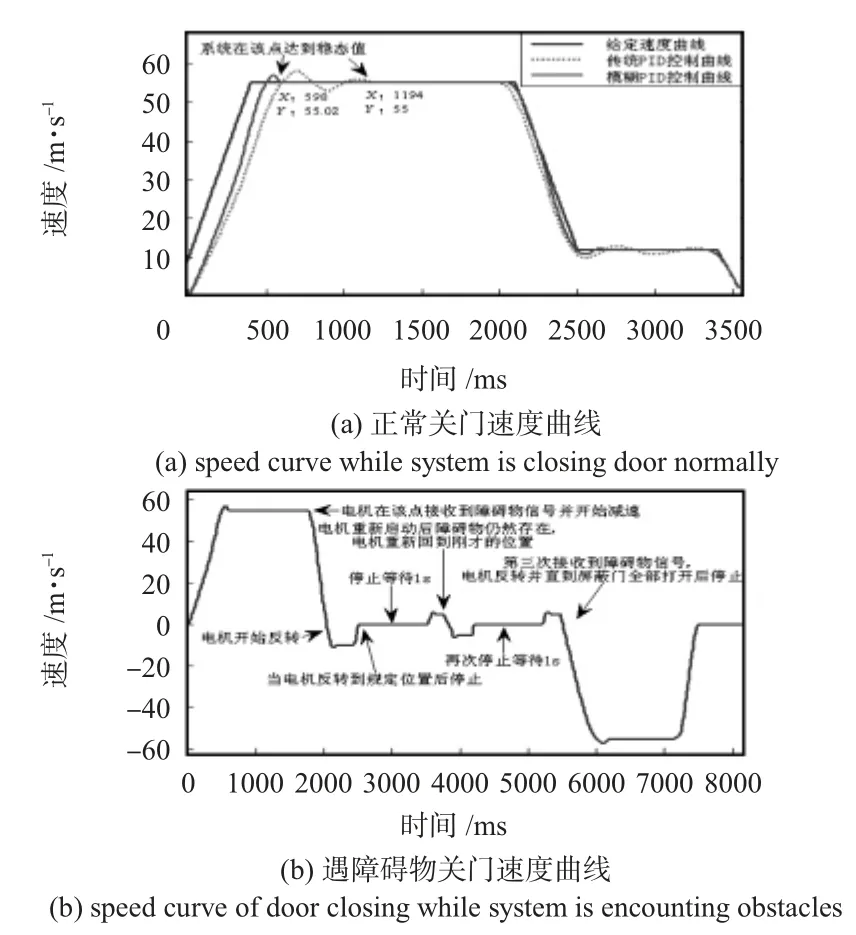
图5 系统在正常情况和遇障碍物时的关门速度曲线Fig 5 Curve of system door closing speed in the situation of normal and encounter obstacles
[1]叶宏.地铁屏蔽门障碍物探测方案的探讨[J].工业控制计算机,2008,21(7):68-69.
[2]邓远华,宋瑞刚.地铁站台“二门系统”防夹人事故措施探讨[J].沿海企业与科技,2010(10):43-44.
[3]许薇,杨卫.一种红外传感器阵列探测方法的研究[J].传感器与微系统,2009,28(9):16-18.
[4]陶志福.用51系列单片机设计物体分级设备的测量光幕[J].国外电子元器件,2004(7):64-66.
[5]张欣,王云宽,范国梁,等.轨道交通门机控制系统驱动控制器关键问题的研究[J].铁道学报,2008,30(5):57-61.
[6]刘金琨.先进PID控制及其Matlab仿真[M].北京:电子工业出版社,2003.
[7]Triem T H,Tamara A O.Design optimization of a hydrogen advanced loop heat pipe for spacebased IR sensor and detector cry cooling[J].SPIE,2003,5172:1120-1131.
[8]Visioli A.Tuning of PID controllers with fuzzy logic[C]∥Proc of IEEE Int’l Conf on Control Theory and Application,2001:69-81.
猜你喜欢
红外技术(2022年11期)2022-11-25 06:07:52
中国典型病例大全(2022年7期)2022-04-22 21:54:03
科学家(2021年24期)2021-04-25 17:56:42
纺织科学研究(2021年1期)2021-03-19 05:18:14
民用飞机设计与研究(2019年4期)2019-05-21 07:21:30
铁道通信信号(2019年3期)2019-04-25 03:00:36
成都信息工程大学学报(2018年4期)2019-01-23 06:57:24
电子制作(2018年23期)2018-12-26 01:01:02
铁道通信信号(2018年9期)2018-11-10 03:26:52
铁道通信信号(2018年7期)2018-08-29 01:17:06
