
温度控制系统在PCR仪中的应用
2013-04-16 10:45
电子世界 2013年5期
1.引言
聚合酶链式反应(Polymerase Chain Reaction,简称PCR),又称无细胞分子克隆或特异性DNA序列体外引物定向酶促扩增技术。PCR技术应用非常广泛,广泛应用在生命科学研究、生化分析、临床诊断、药物分析、法医鉴定和疫情快速检验等各个领域。
温度控制系统的主要任务就是让样品内基因在腔体内进行高温变性(T1)、低温退火(T2)和适温延伸(T3)三个温度阶段的反复循环,使样品内基因完成增殖。温控系统升降温工作循环曲线如图1所示。
目前,PCR检测仪的变温方式主要有两种,分别是变温铝块及变温气流。其优缺点为变温铝块方式应用比较广泛,升降温速率比变温水浴要快,但因PCR管与铝块不可能完全贴使之温度均匀性较差。半导体制冷片变温结构简单,只需向半导体制冷片通电即可加热,改变电压极性即可制冷,所以变温速度较快,但是半导体制冷片容易损坏。变温气流方式,即采用电热丝进行加热,吹入冷空气进行制冷。通过调节功率输出的占空比,就可以调节温度的大小,从而可以实现对温度的升温、降温和恒温的自动控制。另一方面,由于传递热量的介质为空气,空气可以和样品之间实现无缝接触,从而样品溶液的吸热和散热的速度就会很快。
本研究设计并实现了一套适用于实时PCR仪的温度控制系统。系统采用变温气流的方式进行加热,使用常规PID算法进行温度控制。升降温速度极快,实时性强、升降温周期短,为研制商品化的实时定量PCR仪奠定了基础。
2.系统结构
温度控制系统的机械结构主体是一个风腔,采用电热丝加热,冷空气制冷。风腔设有进风口和出风口,风门由步进电机控制,可以任意控制风门的旋转角度,从而达到通过风门改变腔体内的空气流动特性,主要作用是让冷空气进入腔体,热空气从腔体流出,带走热量,达到制冷的作用。腔体内部安装有横流风机,用于加快腔体内部的空气流动,在加热时保持腔体内部空气温度的均匀,在制冷时加快空气流动达到腔体快速降温。腔体上设有装样品的盖口,用于放置样品。腔体内部结构示意图如图2所示。
温控控制系统的硬件执行部件主要包括一个横流风机、两个步进电机、两个霍尔信号传感器、温度采集模块以及加热与制冷模块。图3是整个温度控制系统的具体组成框图。
温度控制包括制冷模块和加热模块,制冷模块主要包括两个风门、一个风机。两个风门分为进风门和出风门,由步进电机控制。风机的主要作用是加快内腔空气流动,保持内腔温度均匀一致,而在降温过程中吹动从风门进入的冷空气,并将风腔内的热空气吹出,达到空气制冷效果。随着冷空气的不断进入,热空气的不断流出,样品温度会不断降低。加热模块主要包括加热装置和加热控制电路两部分。本温控系统采用变温空气加热方式,加热装置选用的电热丝的方式进行加热,而加热控制部分主要是对电热丝的通断控制,从而实现对加热量的控制。
对电热丝加热功率的控制采用PWM控制技术。图4是PWM控制示意图,ON是一个脉冲周期内高电平持续时间,假设当单片机的I/O口为高电平时加热模块工作,则该PWM的占空比=ON/脉冲周期。一般情况下加热的周期都是固定的,所以ON的大小直接决定了PWM占空比的大小,进而影响加热器的功率。而通过模糊PID运算可以得到控制量u(k)的值,并把u(k)的值转化为百分比,然后乘以周期时间,则可以得到ON值,从而得到该周期内加热模块工作的时间,实现对温度的有效控制。
温度采集模块主要由温度传感器、温度变送器、A/D数据采集三大部分组成。由于本温控系统控温范围在50℃~100℃,属于中低温测温范围,且对温度测量精度有较高的要求。基于热电阻式温度传感器的测量精度比热电偶式高,且线性度比热敏电阻式好,故选用热电阻式温度传感器。因热电阻中铂热电阻的测量精度最高,故选用pt100作为本温控系统的温度传感器。
pt100的电阻值随温度的变化而变化,其线性度虽然相对于其他传感器较好,但仍为非线性,需要对其校正,并且需要将pt100的阻值变化转变为电流信号或电压信号,方便进行A/D数据采集。本系统采用温度变送器进行电阻信号到电流信号的转变,并校正pt100的阻值与温度的非线性关系,使得采集回来的温度数据与实际更相符。
温度传感器出来的电流信号经过采样电阻转换为模拟电压信号,再通过A/D转换成数字信号。下位机控制芯片自带8路A/D转换通道,可以将温度变送器的输出信号直接接到下位机上,由下位机上单片机的A/D转换为数字信号,大大简化了系统构成。
经过A/D采集到的温度信号在一恒定温度下会有一定的波动,这是由于干扰所引起的,所以需要对A/D采集到的信号进行数字滤波处理。因为A/D的速度可以达到25万次/秒,可通过多次测量,再取平均值的方法对其滤波。本系统采用对其进行100次A/D采样,去掉最大值和最小值,再取其平均值,将之作为采样的结果。将采样结果通过串口通信传送到上位机,上位机将采样结果实时显示,并绘制实时温度曲线图。温度采集模块组成如图5所示。
3.软件设计
温度控制系统的主要任务就是实现对风腔内温度的控制,主要通过温控算法控温以及向上位机发送实时采集的温度值。为了提高升降温速度,所以在温度相差较大时,不进行PID控温,只有当温差较小时,才进行PID控温,使温度趋于平稳。上位机传送给下位机的是恒温温度、恒温时间以及变温时间三个参数。恒温温度为三个恒温温度段的温度值,恒温时间为三个恒温温度段的恒温持续时间,变温时间为升温和降温的持续时间。下位机根据上位机传送的三个参数,将温度控制分为三个阶段,分别为升温阶段,降温阶段和恒温阶段。图6为升温阶段的控制流程图,定时时间由上位机所发送的升温时间参数确定,ΔT1为设定的温度正偏差,此值一般为正的,因为这时测量的温度会比设定的温度低。因为开升温时,加热是处于全功率状态的,为了确保温度出现超调,需要提前对其关闭,通过设定温度正偏差实现。所以当温度小于温度正偏差时,关升温,停止加热,进入恒温阶段。
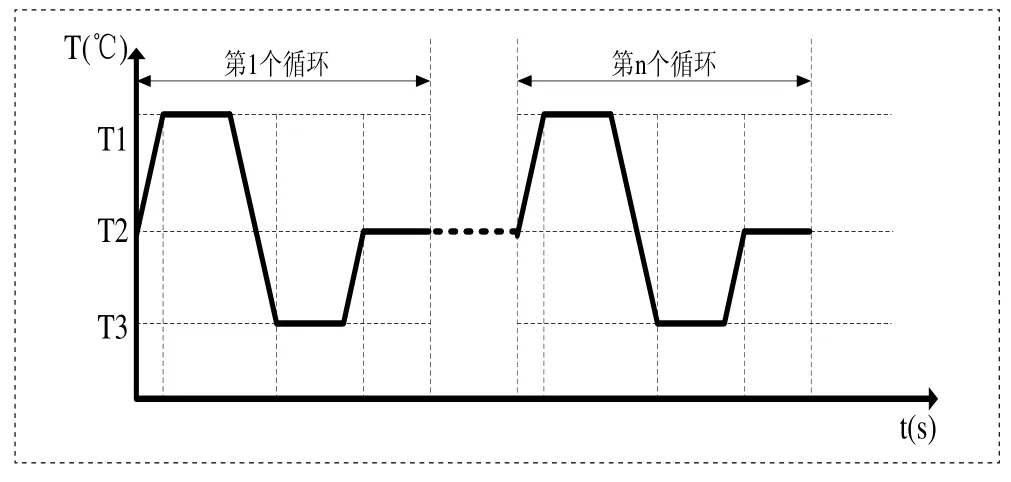
图1 PCR升降温工作循环曲线
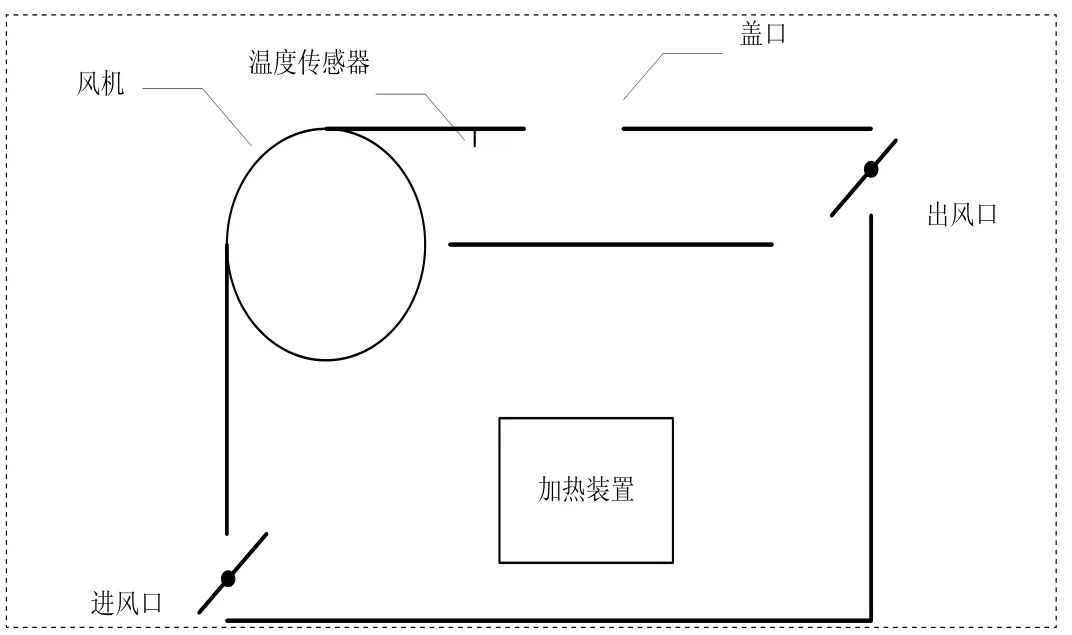
图2 腔体内部结构示意图
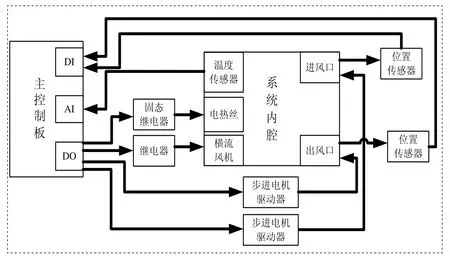
图3 温度控制系统组成框图
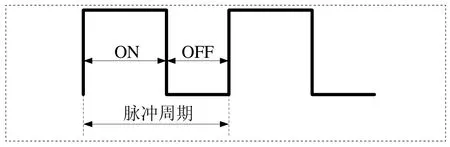
图4 PWM控制示意图

图5 温度采集模块组成
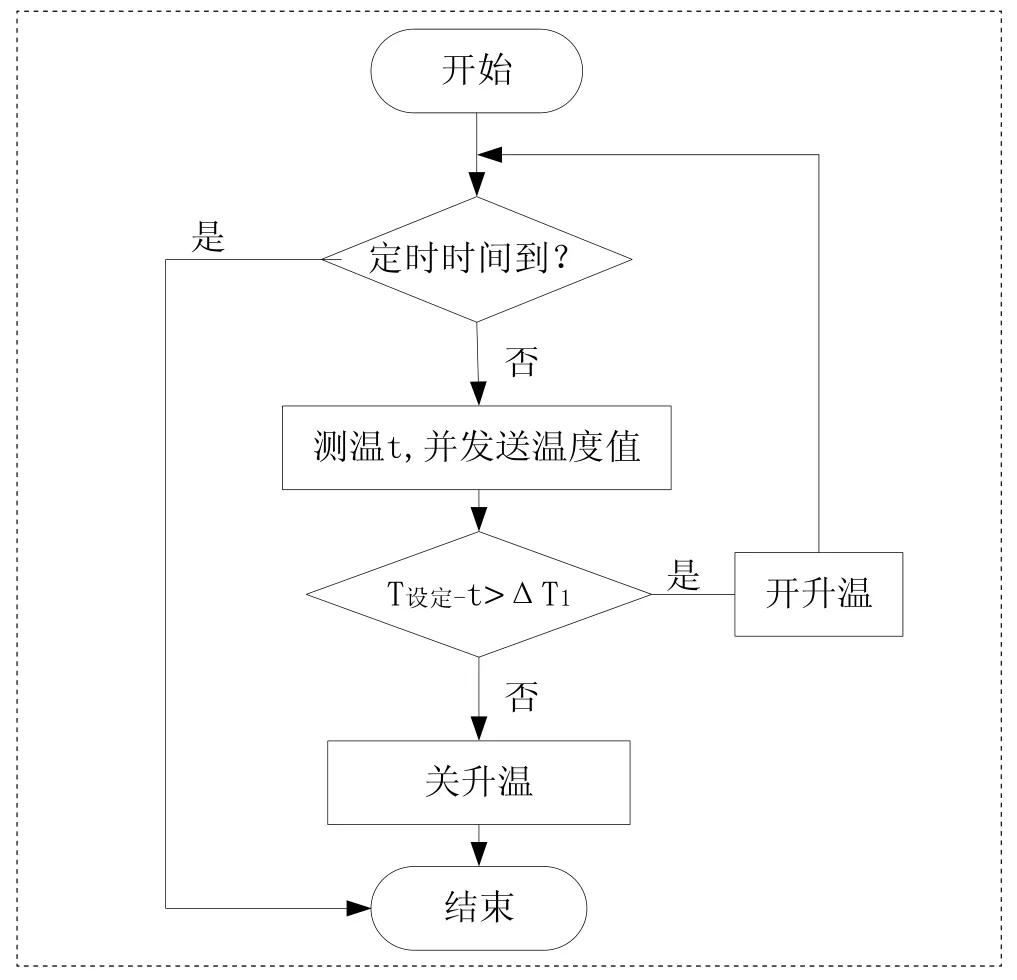
图6 升温阶段的控制流程图
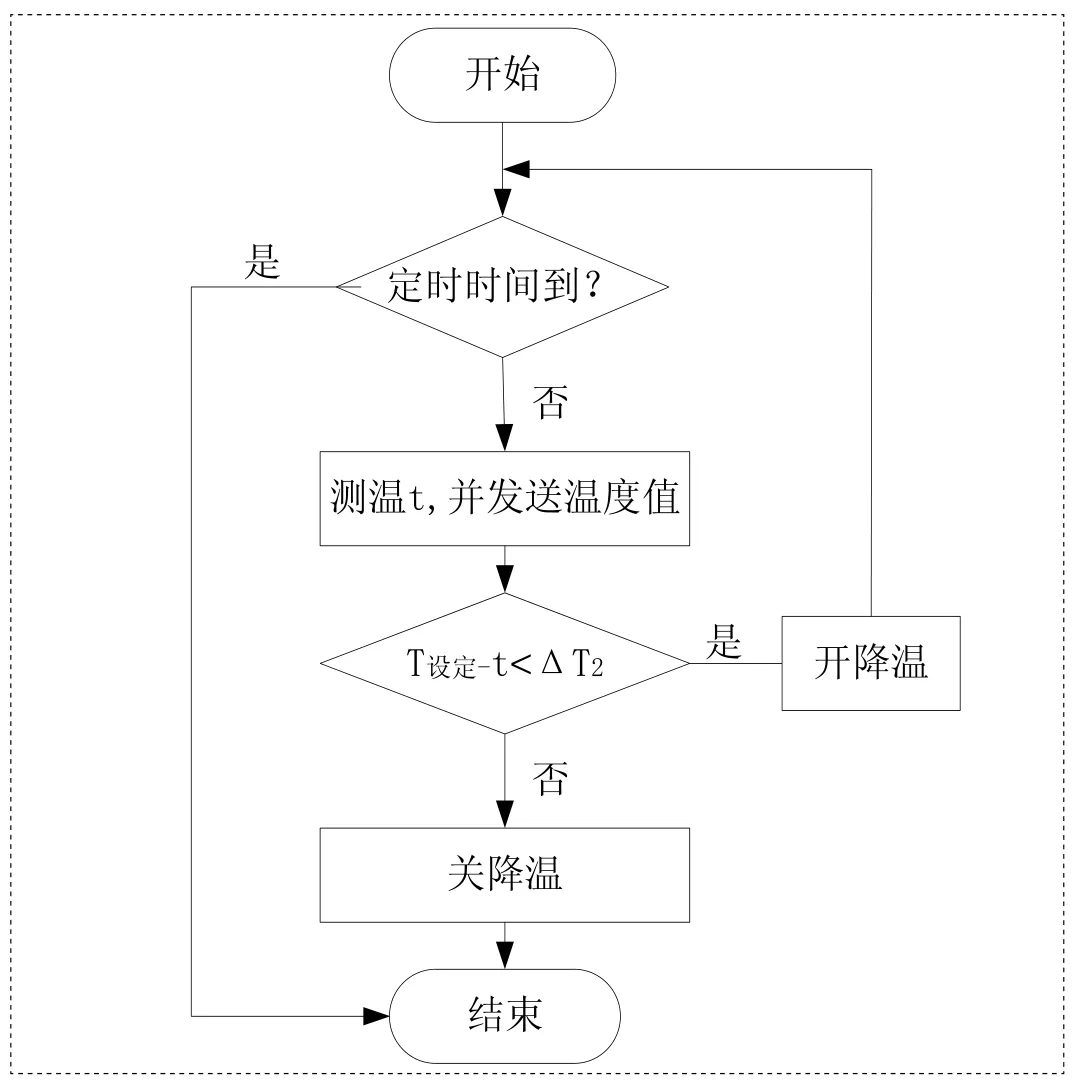
图7 升温阶段控制流程框图
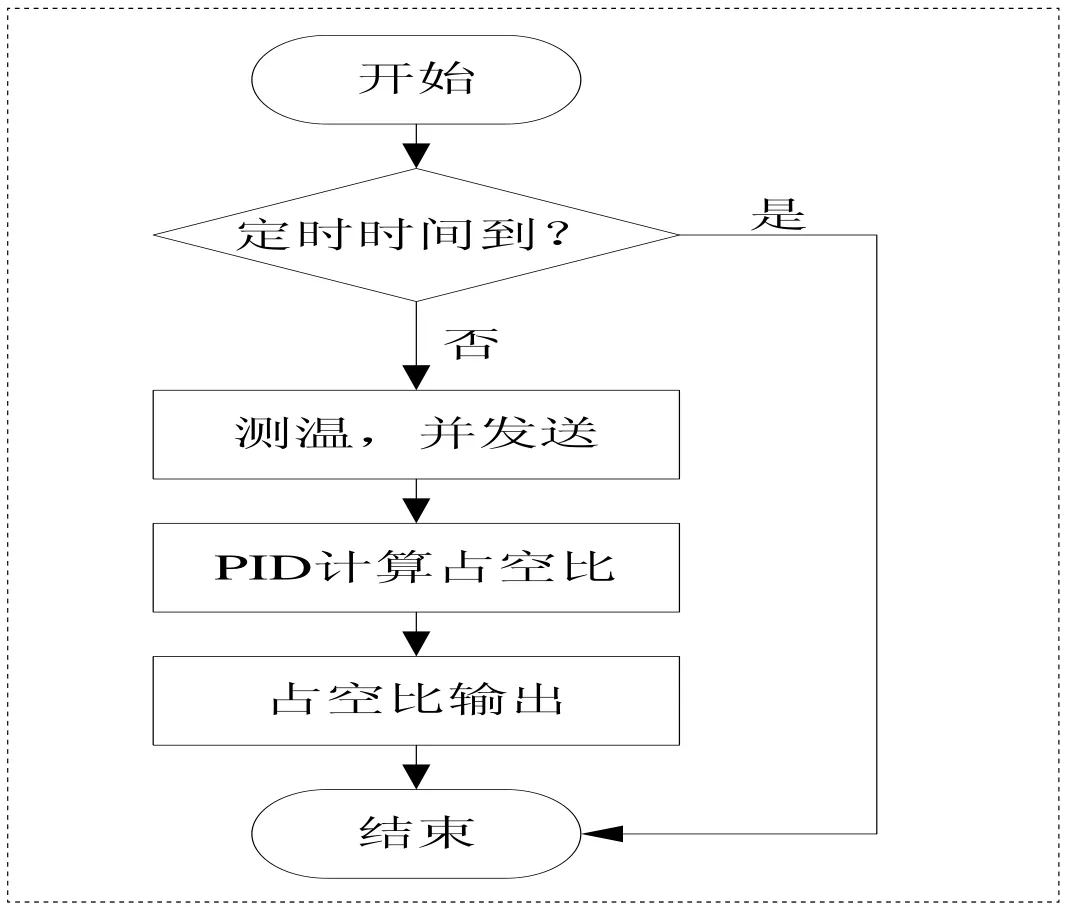
图8 恒温阶段控制流程框图
图7是降温阶段的控制流程图,定时时间由上位机所发送的降温时间参数确定,图4.10中,ΔT2为设定的温度偏差,此值一般为负的,因为这时测量的温度会比设定的温度高。
开降温时,将进、出风门完全打开,在每次开降温前判断风门是否打开。若风门处于打开状态则保持打开状态,若处于关闭状态则执行打开动作。开升温与之一致。
如图8,在恒温阶段的定时时间由恒温持续时间决定,恒温阶段是温度偏差比较小,这时,使用PID算法控制加热的功率,使温度处于稳定状态。
4.结束语
对温度控制系统的软硬件进行了设计与调试,达到了设计要求。升温速率可达到8℃/s,降温速率可达到10℃/s。极大的提高了温控系统的升降温速率。
[1]Gyongy IJ,Clarke DW.On the automatic tuning and adaptation of PID controllers[J].Control Engineering Practice,2006,14(2):149-163.
[2]Dinca MP,Gheorghe M,Aherne M,et al.Fast and accurate temperature control of a PCR microsystem with a disposable reactor[J].Journal of Micromechanics and Microengineering,2009,19(6).
[3]张文超,刘晓光,吴勤勤.基因扩增分析(PCR)仪温控系统的研究与应用[J].华东理工大学学报,2004,30(2):203-206.
[4]李芸婷,万振凯.PT100温度传感器数据实时采集系统[J].仪器仪用户,2007,15(5):24-26.
[5]王冬,张新磊,冯继宏.基于PID算法的PCR仪温度控制系统设计方案[J].北京生物医学工程,2011,30(5):502-505.[6]周润景,徐宏伟,丁莉.单片机电路设计、分析与制作[M].北京:机械工业出版社,2010.8.
猜你喜欢
煤(2022年2期)2022-02-17
原子与分子物理学报(2020年5期)2020-03-17
中国盐业(2018年16期)2018-12-23
山东煤炭科技(2018年1期)2018-12-05
汽车实用技术(2018年18期)2018-09-26
山东煤炭科技(2018年7期)2018-09-12
工业设计(2016年6期)2016-04-17
通信电源技术(2016年4期)2016-04-04
中国粮油学报(2016年5期)2016-01-23
中国惯性技术学报(2015年1期)2015-12-19
