
水底姿态模拟装置伺服控制系统可靠性设计
2013-04-16 10:44
电子世界 2013年5期
1.引言
安置在海底的仪器设备,经常受到海流、鱼群的扰动而发生上升、回转和摇摆运动,使原来的姿态发生改变,这给仪器设备的正常工作带来了不确定因素。水底姿态模拟装置通过升降机构、回转机构和摇摆机构模拟海洋仪器设备在海底的姿态,为实验室中海洋仪器设备的性能测试提供模拟环境。
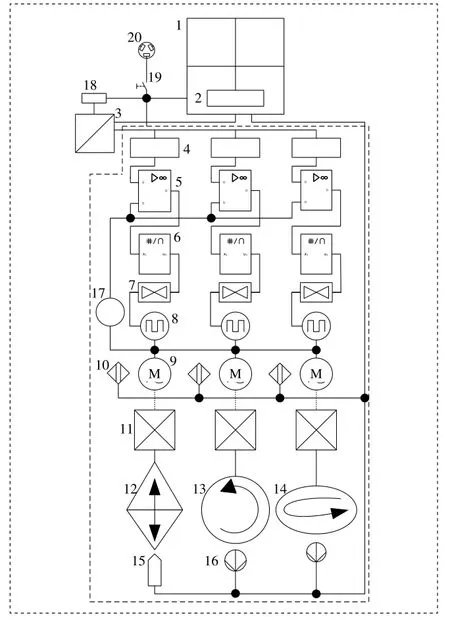
图1 水底姿态模拟装置伺服控制系统原理图
由于水底姿态模拟装置的伺服控制系统直接影响升降机构、回转机构和摇摆机构的可靠性,进而影响整个模拟装置的可靠性,因此在设计伺服控制系统时必须考虑其可靠性设计。
2.伺服控制系统工作原理
水底姿态模拟装置伺服控制系统原理如图1所示。工业控制计算机1通过数据采集卡2为控制器4发送指令和给定量,采集光电编码器10、位置传感器15和角度传感器16的反馈信号,并为整个系统提供友好的人机界面;控制器4为系统提供控制指令和信号;电流调节放大器5、电压/脉宽变换器6、基极驱动器7和PWM功率驱动器8主要实现控制信号的放大、转换、驱动,以便精确控制交流伺服电机9的运转;升降机构12、摇摆机构13和回转机构14用于模拟仪器设备的姿态。
3.伺服控制系统可靠性框图
可靠性框图是系统可靠性设计的依据,它是以实线将若干独立方块连接起来组成一个整体的图形[1]。其中,实线起连接方块的作用,以表示整个方块的次序和方向;方块则表示系统中的独立功能模块,在系统中完成特定的功能。
根据上述工作原理图可得水底姿态模拟装置伺服控制系统的可靠性框图,如图2所示。
系统可靠性框图中有两个数据采集卡,其中数据采集卡2是备用卡,当数据采集卡1出现故障时,数据采集卡2才启动工作。
4.伺服控制系统可靠性数学模型
4.1 各部件数学模型

图2 水底姿态模拟装置伺服控制系统可靠性框图
大量的实验数据表明,伺服控制系统中绝大部分部件及设备的寿命分布为指数分布[2]。指数分布情况下,部件的可靠性特征量计算公式如下[3]:

当已知某部件的失效率λ和工作时间t时,可根据可靠度公式求得可靠度R。
4.2 串联模型
由n个部件组成的串联系统,假设系统中单个部件的可靠度为R1,R2,…,Rn,则整个串联系统的可靠度R为:

4.3 并联模型
由n个部件组成的并联系统,假设系统中单个部件的可靠度为R1,R2,…,Rn,则整个并联系统的可靠度R为:

4.4 非工作储备模型
非工作储备系统中有n个部件组成,假定所有部件相同,而且寿命均服从故障率为λ的指数分布,故障监测和转换装置的可靠度为1,则非工作储备系统的可靠度R为:

由可靠性框图可知,水底姿态模拟装置伺服控制系统中数据采集卡部分是非工作贮备模型,其余都是串联模型。
5.系统可靠性设计
5.1 系统可靠性分配
在进行系统的可靠性分配时,应充分考虑系统各分系统在整个系统中的重要性、复杂性、技术难度、工作时间及环境条件等,以便更好地进行系统的可靠性分配[4]。本次水底姿态模拟装置伺服控制系统的可靠性分配采用评分分配法,系统故障率目标值其分配结果见表1。
5.2 可靠度计算

表1 可靠性分配结果表
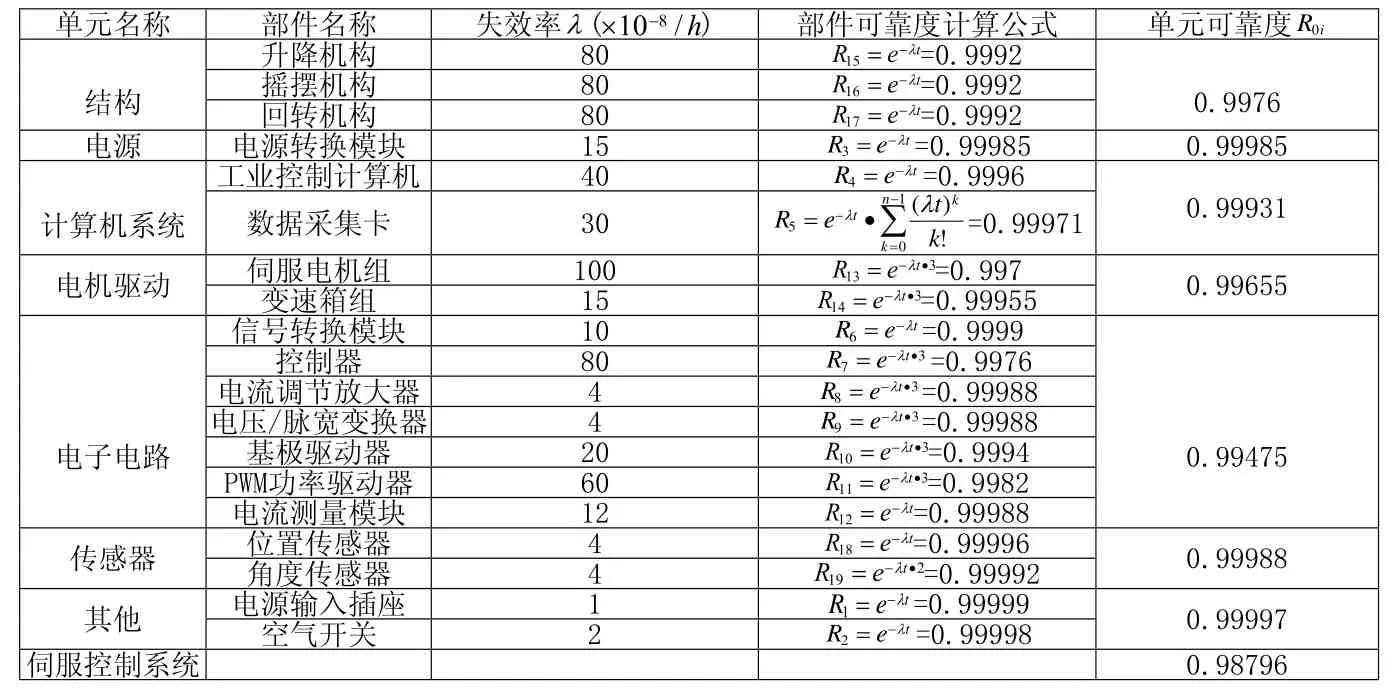
表2 可靠度计算表
通过系统各部件的失效率和可靠性模型可计算出系统的可靠度。水底姿态模拟装置伺服控制系统可靠度的具体计算如表2所示。
6.结束语
通过系统的可靠度计算表可以看出,水底姿态模拟装置伺服控制系统的可靠度为0.98796,且系统各单元的可靠度均满足了可靠性分配指标。为进一步提高整个系统的可靠度,可采取以下措施:(1)提高各部件的可靠度,选择质量更好的部件或设备。鉴于工业控制计算机、控制器、伺服电机和变速箱的可靠度对整个伺服控制系统可靠性的重要性,系统设计时应选取可靠度较高的部件。升降机构、回转机构和摇摆机构设计时,应在材料选择、齿轮配合、部件联接、装置维护、应力分布、机构固定等方面进行合理设计,以尽量提高其可靠度。(2)在适当情况下考虑冗余设计方法[5]。(3)伺服控制系统设计过程中,应采取简化设计的方法,以最少的功能化模块达到系统的功能要求。(4)对整个系统进行日常维护和定期检修。总之,整个伺服控制系统可靠性的提高,应从设计、制造、使用及维护等各个方面进行考虑。
[1]李守仁.可靠性工程[M].哈尔滨:哈尔滨工程大学出版社,2001.
[2]陈明,张京妹.控制系统可靠性设计[M].西安:西北工业大学出版社,2006.
[3]陈炳生.电子可靠性工程[M].北京:国防工业出版社,2003.
[4]陆廷孝,等.可靠性设计与分析[M].北京:国防工业出版社,2001.
[5]谢云叶.机电一体化系统与产品的可靠性设计分析[J].机电工程技术,2004,33(7):27-31.
猜你喜欢
中国测试(2022年2期)2022-03-19
汽车维修技师(2019年7期)2020-01-16
小朋友·快乐手工(2018年9期)2018-12-20
汽车维修技师(2018年11期)2018-05-11
制造技术与机床(2017年8期)2017-11-27
中学生数理化·高一版(2017年1期)2017-04-25
网络安全与数据管理(2016年4期)2017-01-10
电子器件(2015年5期)2015-12-29
语文知识(2015年11期)2015-02-28
新高考·高一物理(2014年4期)2014-09-17
