
电动注射泵控制装置的设计
2013-04-16 10:45
电子世界 2013年5期
电动注射泵是临床医疗和生命科学研究中经常使用的一种注射的仪器,这种仪器主要应用于静脉输液和精密化学实验。使用先进电子技术、传感器技术、计算机技术综合应用于注射泵系统的研究与开发,设计了具有匀速注射功能的注射泵,并且可以联动控制多台注射泵工作,具有良好的人机对话界面和数据处理功能实现自动化控制。该系统已成功应用于临床,具有广泛的市场前景。
电动注射泵系统解决了现有的注射器在使用时需要用人力拉取或推挤注射杆导致注射速度不均匀、医护人员疲劳等问题。它可以预先设定注射液量和流率,保证神经组织适应注入的流体。现今国内外注射泵的主要问题是精度不高,而且一般只实现单通道匀速注射。因此设计实现具有联动控制多台注射泵,实现人机对话数据处理是非常有必要的。
一、硬件设计
如图1所示,系统由软件控制模块、步进电机驱动模块、传感器检测模块和显示模块等组成。
1.软件控制模块
计算机通过RS 232串口与主控制芯片模块连接,通过自主设计的监控软件,可以实时监控和管理注射泵的工作状态,运行后可以实现全自动化处理。主控制芯片模块由ARM和FPGA以及外围电路组成,FPGA产生步进电机所需要的电脉冲信号,传送给驱动器模块,驱动器模块里的脉冲分配器把电脉冲信号按规定的方式分配给电机各相励磁绕组,从而带动步进电机转子运转。与此同时安装在电机轴上的增量式旋转编码器和压力传感器实时监控电机的实际工作情况,由于FPGA具有硬件实时处理的特点,传感器的数据会同步传给FPGA,当旋转编码器已经停止编码,而FPGA在发送脉冲信号,则会马上停止电机运转并蜂鸣报警,进入堵转状态;在压力传感器测得压力超过最大限压时,也会马上停止电机工作,且计算机提示和蜂鸣报警。
2.步进电机驱动器控制模块
设步进电机注射器的注射规格有10ml、20ml、30ml、50ml四种,注射液的注射速率在0.1ml/h-400ml/h范围内以0.1ml/h连续可调。
步进电机驱动采用三洋公司生产的THB7128驱动芯片,它具有高细分,大功率的特点。THB7218为双全桥MOSFET驱动,最高耐压为DC 40V,大电流3.3A(峰值),具有自动半流锁定功能,内置混合式衰减模式。相比其他驱动芯片,该苡片最突出的特点是最高达到1/128细分,因此电机运转非常平稳。
3.传感器模块
(1)旋转编码器
本系统的闭环控制采用了光电式旋转编码器。经过充分的市场调研,选择了日本OMRON公司生产的E6A2系统编码器。它结构简单,体积小,精度高,响应速度快,性能稳定,特别在高分辨率和大量程角速率/位移测量系统中,更具优越性。旋转编码器按照信号和原理分成增量式和绝对式两种,本系统采用增量式编码器。
它由主码盘、鉴相盘、光学系统和光电变换器组成。在主码盘(光电盘)周边上刻有节距相等的辐射状窄带,形成均匀分布的透明区和不透明区。鉴相盘与主码盘平行,并刻有a,b两组透检测窄缝,它们彼此错开1/4节距,以使A,B两个光电变换器的输出信号在相位上相差90°。工作时,鉴相盘静止,主码盘和转轴转动,光投射到主码盘和鉴相盘上,当主码盘上的透明区与窄缝对齐时,光电变换器输出电压最大,当不透明区与窄缝对齐时,电压最小。因此主码盘每转过一个刻线周期,光电变换器将输出一个近似的正弦波电压,且变换器A,B相位差为90°。为了判断码盘的绝对位置,还必须设置一个基准点,即“零位标志槽”。码盘每转一圈,零位标志槽对应的光敏元件产生一个脉冲,称为“一转脉冲”。
(2)压力传感器
本系统采用电阻应变式压力传感器。其工作原理是将一种电阻应变片粘贴在各种弹性敏感元件上,当弹性敏感元件受到外力的作用时将产生应变,电阻应变片将应变再转化为电阻的变化,然后电阻变化值通过数模转换成为压力变化值。压力传感器由4个压敏电阻组成惠斯通电桥电路,无差压时,电桥两臂平等,差压信号加到4个陶瓷压敏电阻上时,压敏电阻的阻值随差压变化,引起电桥失衡。电桥失衡引起电流的变化,通过ADS1242芯片进行数模转换,把模拟信号转化为数字信号,再传至主控芯片。
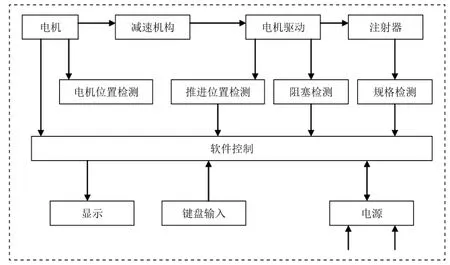
图1 系统组成框图
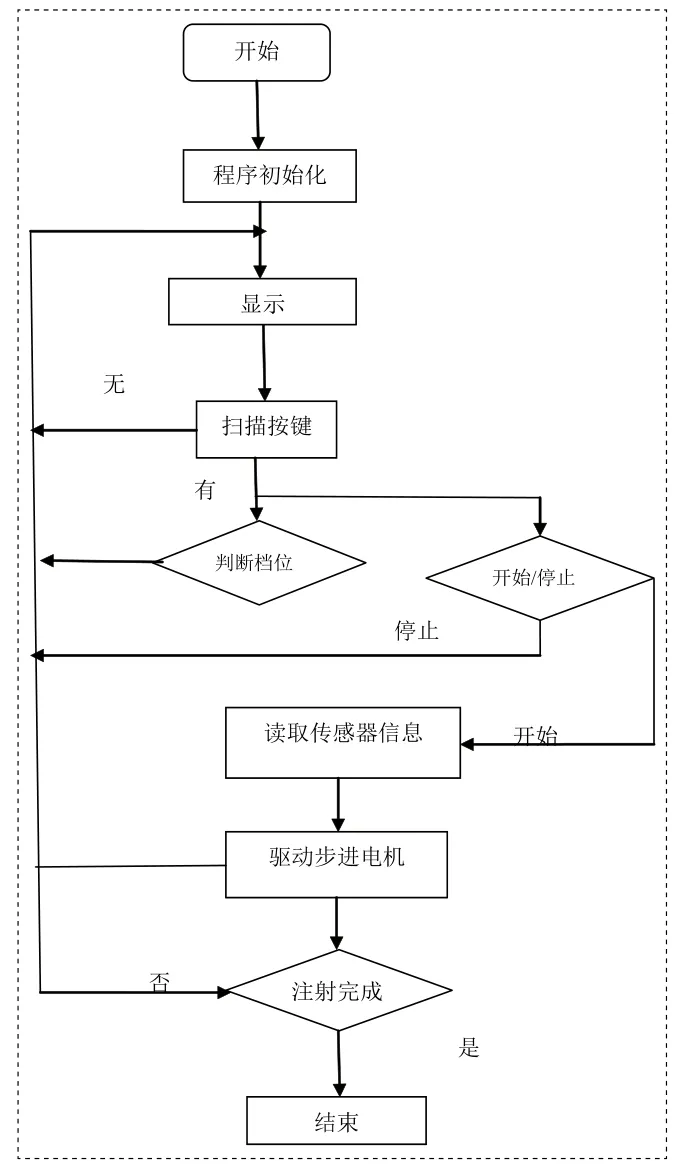
图2 单片机软件设计流程图
4.显示器模器块
使用12864液晶显示器,显示注射流率和注射液流量。要求显示的汉字字体使用16×16点阵,数字字体使用8×16点阵;实时注射液量与进度条自左向右同步变化,进度条的格式为96×3点阵、居中。
使用矩阵键盘作为本装置的控制键盘。其中:0—9为数字键,准备、开/关、复位、设置、加速、减速为6个功能键。
二、软件设计
上位机通过串口RS 232与主控制芯片模块连接。软件分为初始设置栏、系统状态栏、联动控制栏3个部分。
1.设置初始参数:开始速度、输注总量(可以不设)、点击运行,注射泵即开始工作。工作时在系统状态栏里可查看到当前状态,如当前速度、已注射量、设置总量等,当运行完毕后蜂鸣器会长鸣提示。两台注射泵可联动控制,也可以单独控制,目前已做到6台联动控制。
2.工作过程要求:
(1)装置复位
按下复位键,电动注射器刻度指示10
(2)自动注射开始
按下开/关键注射液以设定的注射流率且从预定注射流量开始移动,这时显示器上显示实时注射液量,进度同步准确变化。当注射液量到预置量,表示注射完成,注射自动停止,装置复位至初始状态。至此,一次注射完成。
(3)改变注射速度
在自动注射过程中,每按增速键一次,增加一个注射流率档;每按一次减速键,减少一个注射流率档。步进电机不停转,增加和减少的注射速度值不能超过档位值。
(4)注射手动停止
在自动注射过程中,按下开/关键,步进电机停转,同时注射液量数字显示与进度停止变化。
3.单片机软件设计流程图(如图2)。
[1]葛金印.单片机控制装置安装与调试赛题集[M].北京:机械工业出版社,2012,25-26.
[2]靳孝峰.单片机原理与应用(第2版)[M].北京:北京航空航天大学出版社,2012,65-66.
猜你喜欢
安庆师范大学学报(自然科学版)(2021年1期)2021-03-14
电子制作(2019年13期)2020-01-14
电子制作(2019年15期)2019-08-27
中国材料进展(2019年5期)2019-07-20
电子制作(2019年11期)2019-07-04
电子制作(2019年9期)2019-05-30
泰山学院学报(2018年6期)2018-12-18
成都信息工程大学学报(2018年3期)2018-08-29
西安工程大学学报(2016年6期)2017-01-15
电子器件(2015年5期)2015-12-29
