
隧道GPS控制网横向贯通误差计算方法研究及软件研制
2013-04-16 01:36
铁道勘察 2013年2期
(中铁第四勘察设计院集团有限公司,湖北武汉 430063)
用GPS建立隧道控制网,需计算控制网的主要精度指标(即隧道GPS网精度引起的横向贯通误差)。横向贯通误差的计算有严密的理论表达式,即用平差值函数的坐标协因数阵来计算洞外测量误差所引起的横向贯通误差。GPS商用软件解算GPS测量数据,计算结果一般不提供GPS控制点的坐标协因数阵。因此,用基于坐标协因数阵的方法计算GPS隧道控制网横向贯通中误差难于实现。
1 隧道GPS控制网平差与坐标协因数阵计算
对于隧道GPS控制网,通常可采用固定一个点的坐标,指定一个方向的方位角,选择相应的工程投影面,从而建立隧道GPS工程独立坐标系,进行GPS工程控制网一点一方向平差。其基本思路是:首先在WGS-84坐标系中进行三维无约束平差,然后选取合适的中央子午线和投影高程面,将无约束平差的坐标成果投影到高斯平面上,最后在高斯平面上通过平移旋转将成果转换到隧道独立坐标系中。GPS网的三维无约束平差以及高斯投影在文献[1]中有详细介绍,隧道GPS控制网经三维无约束平差、高斯投影,可获得高斯平面直角坐标系中的坐标及其坐标协因数阵[2],其中坐标协因数阵的转换可分两步来进行,首先将空间直角坐标的协因数阵转换成大地坐标的协因数阵,然后将大地坐标的协因数阵转化成高斯平面直角坐标的协因数阵。
1.1 空间直角坐标协因数阵转换成大地坐标协因数阵
大地坐标与空间直角坐标的微分关系式为

(1)

QBLH=AQXYZAT
(2)
式中,QBLH为大地坐标的协因数阵,QXYZ为空间直角坐标的协因数阵,QXYZ可由三维无约束平差得到。
1.2 大地坐标协因数阵转换成高斯平面直角坐标协因数阵
大地坐标与高斯平面直角坐标的微分关系式为
(3)
其中G11=N[(1-e2)/w2+((1-2sin2B+e2sin2Bcos2B)λ2)/2]
G12=N[λ+((5-6sin2B)λ3)/6]sinBcosB
G21=-N[λ(1-e2)/w2+((5-6sin2B)λ3)/6]sinB
G22=N[1+λ2(1-2sin2B+e2cos4B)/2]cosB
w2=(1-e2sin2B),λ=L-λo
上式中λo为中央子午线的经度,L为大地经度,e为参考椭球的第一偏心率。
Qxy=GQBLGT
(4)
式中,Qxy为高斯平面直角坐标的协因数阵,QBL为大地坐标的协因数阵。
1.3 高斯平面直角坐标的协因数阵转换成隧道独立坐标系协因数阵

(5)
根据协因数传播定律,可得变换后的隧道独立坐标系的协因数阵
(6)
式(6)中Qxy为高斯平面直角坐标协因数阵,Rα为对角阵,其主对角线上的子块均为
(7)
隧道GPS控制网一点一方向平差属于GPS经典自由网平差,通过选取合适的中央子午线和投影高程面,可使GPS网在高斯平面上的边长尺度与地面网的边长尺度相一致,特别适合隧道GPS工程控制网。
2 隧道GPS控制网横向贯通误差计算
隧道工程独立坐标系的设置如图1所示。

图1 隧道工程独立坐标系示意
由进洞口AB方向、出洞口DE方向推算至贯通点P的坐标差表达式为
(8)
式中(XPA,YPA)、(XPD,YPD)为洞口点A、D推算至贯通点P的坐标,αAB、αDE为AB、DE的坐标方位角。将贯通点P的坐标差ΔXP、ΔYP投影到横向贯通面上,并进行全微分,可得
dP=-sinφ×d(ΔXP)+cosφ×d(ΔYP)
(9)
aABΔX′APbABΔX′AP-sinφ+aDEΔX′DP
cosφ+bDEΔX′DP-aDEΔX′DP-bDEΔX′DP]
dZ=
式中
由误差传播定律,可得横向贯通中误差为
(11)

3 软件设计与实现
根据隧道GPS控制网一点一方向平差与横向贯通误差计算理论,采用Visual C#.NET作为开发工具,研制了一个集测量数据处理、可视化操作及图形处理技术的隧道GPS网平差软件,该软件能够可靠、准确地进行隧道GPS控制网一点一方向平差,并能输出洞口点坐标的坐标协因数阵和验后单位权中误差,实现了隧道GPS控制网横向贯通误差的严密计算。
3.1 总体功能设计
隧道GPS网平差软件由项目管理、数据质量检核、网平差处理、贯通误差计算、网图显绘等功能模块组成。项目管理模块:对欲进行处理的数据进行统一管理;数据质量检核模块:对GPS基线数据进行闭合差计算、重复基线较差计算,检核外业GPS观测质量;网平差处理模块:将WGS-84坐标系下的基线向量通过平差与转换得到隧道独立坐标系的测量成果;贯通误差计算模块:对隧道GPS网精度引起的横向贯通误差进行计算;网图显绘模块:对控制网进行网图绘制,并可利用图形操作按钮对其进行操作。
3.2 数据处理流程设计
根据总体功能设计,对数据处理流程进行设计,软件的数据处理流程如图2所示。

图2 数据处理流程示意
主要界面如图3、图4所示。

图3 一点一方向参数设置

图4 隧道横向贯通误差计算参数设置
4 算例
以一个实际隧道GPS控制网为例,进行一点一方向平差与横向贯通误差计算。该隧道全长9.185 km,隧道的进洞洞口投点JMCPI03、定向点JMCPI01,出洞的洞口投点JMCPI07、定向点JMCPI09,贯通点的设计坐标(2 495 086.980,505 078.560),隧道工程独立坐标系X轴与贯通面夹角为65°。
首先进行隧道GPS网一点一方向平差,平差的验后单位权中误差为1.124 mm,并从平差成果中提取隧道洞口投点和定向点的隧道独立坐标系坐标和坐标协因数阵(见表1、表2)。
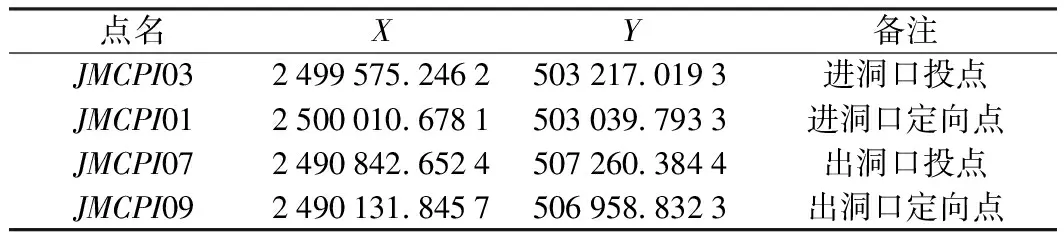
表1 洞口投点、定向点的坐标 m
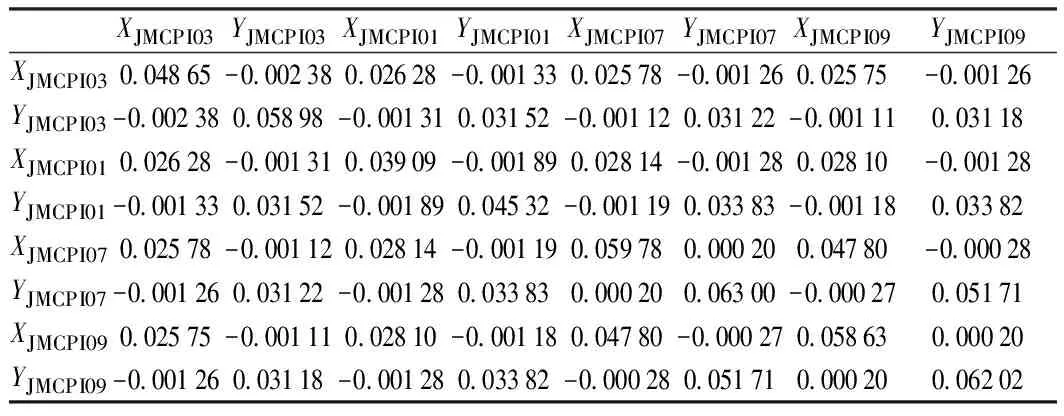
表2 洞口投点、定向点的坐标协因数阵
根据洞口投点、定向点的坐标及其协因数阵,严密计算隧道GPS控制网对横向贯通误差的影响,GPS控制网引起的横向贯通误差为±5.6 mm,小于《铁路工程测量规范》要求的横向贯通误差允许值(45 mm)。
[1]刘大杰,施一民,过静君.全球定位系统的原理与应用[M].上海:同济大学出版社,1996
[2]余学祥,吕伟才.空间直角坐标的协因数阵转换到高斯平面上的计算公式[J].测绘信息与工程,1997(4):18-21
[3]张项铎,张正禄.隧道工程测量[M].北京:测绘出版社,1998
[4]TB10101—2009铁路工程测量规范[S]
猜你喜欢
中学生数理化·七年级数学人教版(2022年4期)2022-04-26
中学生数理化·七年级数学人教版(2022年4期)2022-04-26
建材发展导向(2021年16期)2021-10-12
中学生数理化·七年级数学人教版(2021年4期)2021-07-22
小天使·二年级语数英综合(2019年4期)2019-10-06
小学生学习指导(低年级)(2019年6期)2019-07-22
中学生数理化·七年级数学人教版(2018年4期)2018-06-28
中国工程咨询(2016年1期)2016-02-14
电影故事(2015年16期)2015-07-14
