汽车C A N总线诊断通信模块的开发测试
2013-04-13 02:46:08申帅赵恬
科技视界 2013年3期
申帅赵恬
(重庆邮电大学 自动化学院,中国 重庆 400065)
0 前言
随着汽车电子技术的飞速发展,越来越多的电子器件应用到车辆内部,极大的提高了车辆的安全性、可靠性和舒适性。同时也带来了新的问题,车身线束增多、车辆故障诊断困难增加[1]。为了减少车身线束、提高通信速率,车载总线技术应运而生。
CAN总线以其在高实时性、可靠性和抗干扰能力等方面的优势,成为当前应用最为广泛的车载总线技术之一。本文遵循国际诊断标准ISO 15765完成诊断通信模块的开发,实现过程采取分层模块化设计,提高通信模块的通用性、重用性。
1 ISO 15765诊断协议体系
ISO 15765是2000年欧洲汽车厂商推出一种基于CAN总线的诊断系统通信标准,目前ISO 15765标准已被多数整车厂商采用,成为汽车行业的通用诊断标准[2]。ISO 15765根据开放系统互连(Open System Interconnection,OSI)7层参考模型,采用分层思想模块化设计的方式,各模块负责处理各自功能并提供标准接口[4],各模块间通过接口调用实现通信,以减低模块间耦合度,增强协议栈的通用性和可靠性。
ISO 15765-3以ISO 14229为基础定义诊断协议栈应用层的内容,对应于OSI模型应用层,主要包括应用层诊断服务格式、应用层接口、应用层时间参数等信息。ISO 15765-2定义了诊断协议栈网络层的内容,对应于OSI模型网络层和传输层,包括了网络层单帧、多帧传输机制,以及多帧传输过程中的流控制、时间处理、错误处理等内容。
2 通信模块的开发
网络层的实现是整个通信模块的主要内容[3],其核心是多帧传输机制中ECU内部的状态转换、时间管理以及错误处理。
2.1 网络层多帧传输机制
CAN总线数据传输以CAN数据帧为基本数据单元,每一个CAN数据帧最多可传送8个字节的数据,而完成汽车诊断功能需要传输的数据往往大于8个字节,因此需要采用多帧传输机制。ISO 15765-2定义了4种网络层协议数据单元N_PDU以完成单帧或多帧的数据传输,4种帧类型通过N_PCI(网络层协议控制信息)区分[4]。其定义格式如表1所示:

表1 CAN总线报文格式定义
不同的帧类型由N_PCI第一个字节的高四位区别,N_PCItype的值0、1、2、3分别代表了单帧、第一帧、连续帧和后续帧。流控帧FS为流状态参数,BS为连续帧块大小,STmin为连续帧发送的最小时间间隔。
在多帧传输的过程中,网络层的内部操作为解决对等实体间的数据同步通信问题,采用了数据传输流控制方法,通过流控帧实现对通信双方的管理,是发送端适应接收端网络层的接受能力。其传输过程如图1所示:
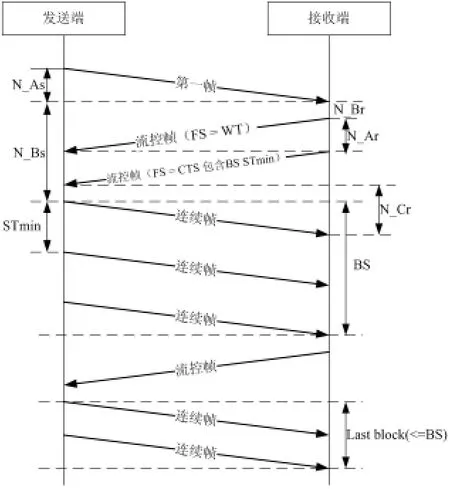
图1 多帧传输过程
2.2 状态转换机制
为了实现网络层多帧传输机制的复杂逻辑,在程序编写过程中设计状态机,用枚举类型定义了数据传输过程中ECU网络层在某一时刻的所有可能状态。
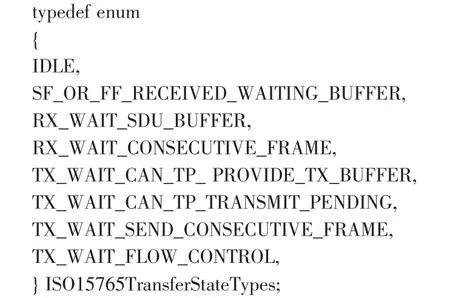
数据传输过程中ECU处理不同类型被定义为不同的外部事件,ECU在不同的状态下将处理不同的CAN帧。ECU网络层状态定义是收敛的,因此在某一时刻一定会处于所有状态中的其中一个,保证能够对所有类型CAN帧都能够响应;且ECU网络层状态是正交的,不会对同一类型CAN帧重复处理。
此外ECU根据当前网络层状态,对所收到的CAN帧处理,不仅取决于接收到的帧类型,还取决于不同帧类型的相对收发顺序。当ECU网络层处于某一状态收到相应帧类型,且满足特定的条件时,才能处理相应CAN帧并完成ECU状态转换。
2.3 时间管理
网络层时间管理主要是超时处理和延时发送功能。ISO 15765定义的网络层时间参数有 N_As,N_Bs,N_Ar,N_Br和 N_Cr。 超时处理通过对时间参数的控制,防止通信双方中的一方因为潜在错误挂起时,另一方持续等待从而失去通信能力。延时发送功能用于多帧传输过程中连续多条后续帧的发送,连续两条后续帧之间的发送间隔必须大于ISO 15765定义的最小时间间隔STmIn。
协议栈时间管理利用ECU的系统时钟实现,通过配置每1ms产生一次系统中断,在中断处理函数中对定义的16位无符号计数器timeoutCounter进行减1操作。在通信过程中每接收或发送一条报文,则会更新计数器为相应时间参数的门限值,在进行下一步操作之前首先判断计数器是否为0,若为0则说明超时,中断当前接受或发送进入相应的超时处理。
2.4 错误处理
网络层的错误包括了帧格式错误、帧参数错误。通信双方必须按照ISO 15765规定的帧格式、帧间逻辑及时间参数收发报文,任何类型的错误都将导致当前通信中断,并进入相应的超时处理。网络层错误类型及处理方式如表2所示:
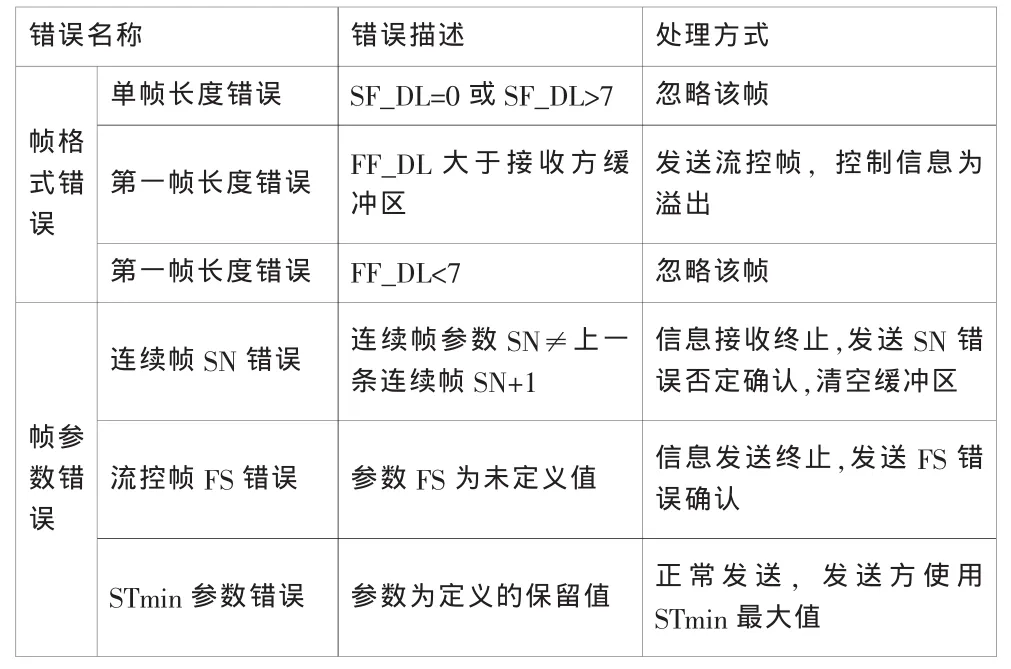
表2 网络层错误处理描述
3 通信模块的测试
诊断协议栈的测试采用德国Vector Informatik公司总线工具CANoe及其配套专用诊断测试工具CAN dela Studio、CANoe Option DiVa,作为测试仪。协议栈运行在采用NXP LPC 1768为控制器的开发板,作为下位机。测试仪和下位机通过标准的DB9接口连接,CAN总线的通信速率定义为500Kb/s,物理寻址请求报文ID定义为0x766,功能寻址请求报文ID定义为0x760,响应报文ID定义为0x7A6。
根据诊断需求使用CAN dela Studio配置生成诊断数据库(CDD文件),将诊断数据库导入CANoe Option DiVa中自动生成测试用例并通过CANoe运行,如图2所示。

图2 通信模块测试结果
4 结论
测试结果表明,本文所述实现的诊断协议栈符合ISO 15765标准,能够完成汽车故障诊断功能,且具有较强的可靠性和通用性。并且协议栈各模块参考AUTOSAR架构设计实现,方便协议栈在不同硬件平台的移植,具有较强的复用性和可移植性。
[1]郭刚,王励明,卢明.基于 MVCI、ODX的诊断标准研究[J].制造业自动化,2010,(10):15-16.
[2]李锐,王晶莹,姚燕,等.基于ISO 15765的车载CAN网络诊断设计[J].计算机工程,2012,(4):35-36.
[3]韩鑫,鲍可进.CAN总线网络层协议栈开发测试[J].计算机工程,2011(08):232-234.
[4]程安宇,赵国庆,冯辉宗,等.基于CAN总线的电子控制单元功能测试方法[J].计算机应用,2012(1):139-1.
猜你喜欢
IEEE/CAA Journal of Automatica Sinica(2024年2期)2024-03-01 10:59:14
测控技术(2018年6期)2018-11-25 09:50:12
测控技术(2018年8期)2018-11-25 07:42:08
教育教学论坛(2016年49期)2017-02-27 21:19:25
中国科技博览(2016年4期)2016-04-25 11:15:57
电测与仪表(2016年21期)2016-04-11 12:43:52
物联网技术(2015年8期)2015-09-14 09:30:13
电子设计工程(2015年8期)2015-02-27 12:05:26
河南科技(2014年16期)2014-02-27 14:13:22
中国神经再生研究(英文版)(2014年11期)2014-01-22 16:46:01