开关磁阻电动机模糊-单神经元PID 控制研究
2013-04-09 06:54陈永光王宏华
机械制造与自动化 2013年1期
陈永光,王宏华
(河海大学 能源与电气学院,江苏 南京 211100)
0 引言
开关磁阻电动机(SRM)由于结构简单、牢固、运行可靠、制造成本低、调速性能优越等诸多优点,是一种具有发展潜力的新一代交流调速电动机[1]。但SRM 调速系统是具有非线性、强耦合及时变性的复杂系统,加之系统运行时还会受到负载扰动等不确定因素的干扰,使用传统PID控制很难达到最佳的控制效果。
单神经元PID 控制具有自适应学习能力、且结构简单、实时性好,但单神经元在响应的快速性方面与常规PID 控制器相比,存在明显不足[3],且单神经元PID 控制器本质上还是PID 控制,它在跟踪设定值和抗扰动能力之间存在矛盾,往往使系统不能获得最佳的控制效果。
模糊控制是一种智能控制方法,它基于模糊集理论,将专家的经验和知识表示为模糊语言规则用于控制。模糊控制不依赖于被控对象的精确数学模型,对被控对象的参数具有较强的鲁棒性。但通常采用的二位模糊控制器以系统误差E 和误差变化EC 为输入模糊变量,控制量为模糊控制器的输出,相当于非线性PD 控制,采用该方法可能获得良好的动态性能,但静态误差却不易消除[2]。
在图1 所示的SRM 转速-转矩双闭环调速系统的速度环,引入模糊控制与单神经元PID 相结合的控制算法,以发挥单神经元和模糊控制各自的优势。

图1 开关磁阻电动机调速系统结构图
1 模糊与单神经元相结合的控制算法设计
控制器结构如图2 示,用开关来切换模糊控制与单神经元PID 控制,当速度误差大于10 r/min 时,通过开关选择模糊控制(FC)进行控制,单神经元的输入为零,不起作用;当速度误差小于10 r/min 时,通过开关选择单神经元PID 控制器进行控制,这样即对控制的盲区进行了控制,消除了系统稳态误差,而且切换开关延迟了单神经元的作用,有效的防止权值w1(t)和w2(t)的饱和[3]。

图2 控制器结构图
1.1 单神经元PID 控制器设计
PID 的控制算式为[8]:

其相应的增量式PID 的控制算式为[6-7]:

式中:KP,KI,KD分别为比例、积分、微分系数;只要调整好比例、积分、微分系数,就可以进行简单有效的控制。
由单个神经元构成的PID 控制算式为:

式(2)中的系数w1,w2,w3可通过神经元的自学习能力进行调整,单神经元PID 控制相当于一种在线自调整的PID控制器。
本文将无监督的Hebb 算法和有监督的Delta 算法结合起来,学习算法为:

则规范化的学习算法如下[9]:

其中:单神经元PID 控制器的输入为:

x1(t)是系统误差,x2(t)是系统误差的变化,x3(t)是系统误差变化的一阶差分,它们对应的权值分别为w1(t),w2(t)和w3(t);ku为单神经元PID 控制器的增益;ηP,ηI,ηD分别为比例、积分和微分的学习速率,取值范围在0~1 之间。在设计过程中,通常简化微分项作用令ηD为零,这是因为PID 控制方式的微分项只是用来改善系统的动态性能,而在稳态阶段由于微分项对于干扰信号比较敏感,易使系统响应出现震荡。
1.2 模糊控制器设计
输入信息E,EC 和输出信息U 的论域范围均取为{-6,6},它们以模糊语言描述的模糊集均为{NB,NM,NS,ZE,PS,P,M,PB},这些模糊语言值分别表示负大,负中,负小,零,正小,正中,正大(表1)。为简化计算,选用三角形隶属函数,模糊推理选用Mamdani 方法,反模糊化采用加权平均法[4]。
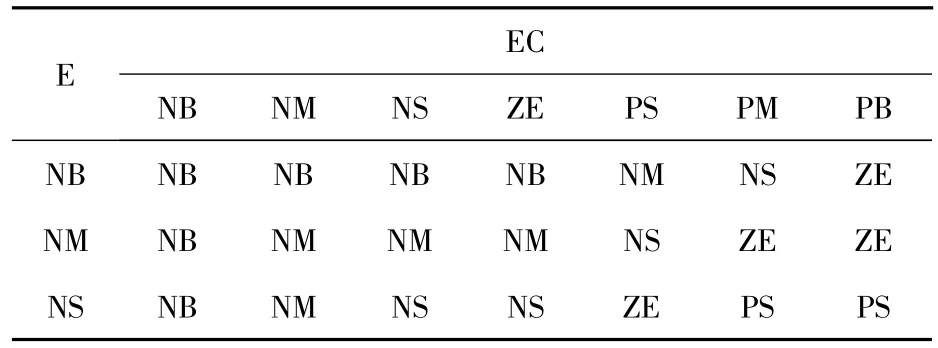
表1 控制规则表

2 仿真结果及分析
为验证所设计的组合控制器的性能,在MATLAB/Simulink 平台上建立了基于模糊-神经元PID 的SRM 调速系统仿真模型。SRM 参数如下[1]:额定功率PN=750 W;额定电压UN=220 V;额定转速nr=1 500 r/min;定子极数NS=8,转子极数NR=6;转动惯量J=0.001 95×9.8 N·m2;阻尼系数:f=0.081 3 N·m/s。
模糊单神经元PID 控制器的参数为增益k=1.8,ηP=0.3,ηI=0.1,ηD=0,量化因子ke=0.1,kec=0.3 比例因子ku=3.5;传统PID 控制器进行速度控制参数如下:比例系数Kp=5,积分系数KI=2,微分系数KD=0。给定转速nr=500 r/min,给定负载转矩初值为0,电动机稳速运行时,于0.1 s 加入大小为2 N·m 的负载,并与0.15 s 撤掉此负载,以此检验系统抗负载扰动的能力,仿真波形如图3 所示。图中曲线①代表传统PID 控制方式下转速响应曲线,②代表模糊单神经元PID 控制式下转速响应曲线。

图3 速度响应曲线图
重复上述操作,在时间t=0.1 s 时由给定转速500 r/min突然变为800 r/min,得到的响应曲线如图4 所示,传统的PID 控制在达到新的给定转速时出现一个大的扰动,而模糊单神经元PID 控制的响应曲线相对平滑。
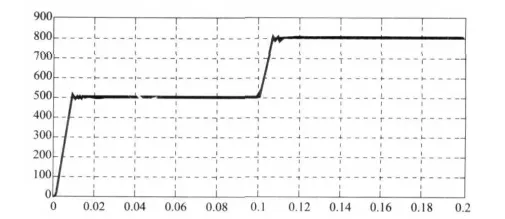
图4 速度响应曲线
3 结论
本文设计了模糊-单神经元PID 控制器代替传统的PID 控制器进行了SRM 的转速控制,充分利用了两者不依赖于系统模型参数(表2),适合非线性控制的共性,兼顾了模糊控制的快速性和单神经元控制的自适应性,并通过结合的方法互补其不足[5]。仿真结果表明,模糊与单神经元控制相结合的控制比传统的PID 控制具有更快的响应速度、更小的超调和更短的调节时间,且系统的抗干扰能力也明显优于传统的PID 控制。
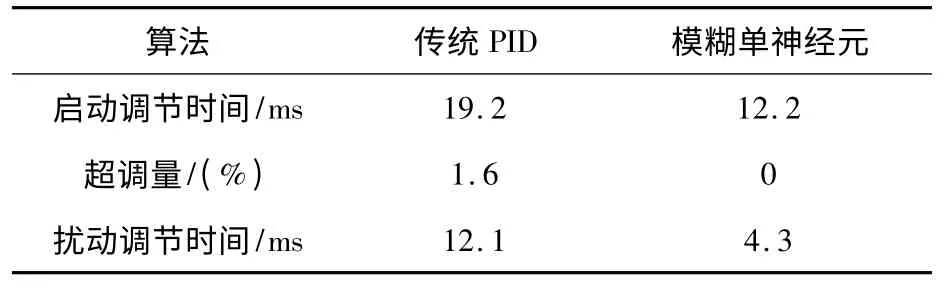
表2 两种控制下速度响应性能比较
[1]王宏华.开关型磁阻电动机调速控制技术[M].北京:机械工业出版社,1995.
[2]王秀君,胡协和.一种改进的单神经元PID 控制策略[J].浙江大学学报,2011,45(8):1498-1501.
[3]方栋良,赵荣祥,吴茂刚.模糊单神经元PI 复合调节的永磁同步电动机矢量控制系统[J].机电工程,2005,22(10):5-9.
[4]吕龙,刘凤春,牟宪民.永磁同步电机单神经元模糊PID 控制[J].电气传动与自动控制,2011,33(2):17-19.
[5]陈霞.基于模糊单神经元控制的磁力轴承控制研究[J].中原工学院学报[J],2007,18(3):13-16.
[6]杨光军,肖冰,朱晓娟,等.一种基于模糊调节增益的单神经元PID 控制方法[J].自动化与仪表,2004,19(1):44-46.
[7]严卫,王育才,孙希通.基于单神经元自适应PID 控制器的无刷直流电动机的控制方法研究[J].微电机,2007,40(8):34.
[8]刘金琨.先进PID 控制及其Matlab 仿真[M].2 版.北京:电子工业出版社,2003.
[9]薛定宇.控制系统计算机辅助设计[M].2 版.清华大学出版社,2006.
猜你喜欢
防爆电机(2021年4期)2021-07-28
数学物理学报(2021年2期)2021-06-09
数学物理学报(2019年5期)2019-11-29
北京航空航天大学学报(2017年4期)2017-11-23
中国惯性技术学报(2017年1期)2017-06-09
电子设计工程(2017年20期)2017-02-10
广东技术师范大学学报(2016年5期)2016-08-22
系统工程与电子技术(2016年7期)2016-08-21
哈尔滨师范大学自然科学学报(2015年1期)2015-04-19
电机与控制应用(2015年1期)2015-03-01