
基于RBF 神经网络的某交流伺服系统辨识研究
2013-04-09 06:54刘通童仲志
机械制造与自动化 2013年2期
刘通,童仲志
(南京理工大学 机械工程学院,江苏 南京 210094)
0 引言
由于某交流伺服系统存在空回非线性、结构非线性、摩擦非线性等非线性因素,因此,很难对其进行精确的数学建模。神经网络具有自学习和自适应能力,可以任意精度逼近非线性映射。利用神经网络逼近非线性映射的过程,实质上是采用某种优化方法,利用神经网络的学习功能,寻找观测到的系统的输入输出数据之间的内在映射关系,训练结束后,系统的特性就存储于网络内部的各个权系数上,而神经网络本身就是要寻找的非线性映射。因此,神经网络在非线性系统的辨识中的应用具有很重要的研究价值[1-3]。但是常用于训练网络的BP 算法在学习过程中可能陷入某些局部最小值,或某些静态点,或在这些点之间振荡[4]。在这种情况下,不管进行多少次迭代,系统都存在很大的误差。
RBF 神经网络模仿了人脑中局部调整、相互覆盖接收的神经网络结构,因此它是一种局部逼近网络[5]。局部逼近型神经网络的快速训练特征,决定了它能有效地用于实际系统的建模和控制领域,然而RBF 网络的隐含层节点数目和数据中心难以确定一直制约RBF 神经网络的应用,本文采用聚类与梯度混合学习算法设计RBF 神经网络,首先,在无监督学习下,通过聚类算法扩展设定RBF 网络的隐含层节点数、数据中心和扩展常数;然后,在有监督学习下,用梯度训练算法对网络参数估计,确定隐含层和输出层间的连接权值。
1 系统结构框图和工作原理
交流伺服系统的结构框图如图1 所示,它的工作流程是:由控制计算机根据伺服系统给出的方向和高低角度,计算出当前的控制信号,经过D/A 转换后,传递到伺服放大器中;在伺服放大器中对输入的信号进行调理,随即传送至交流调速系统中;交流放大器根据传送来的信号大小,通过速度反馈来调节交流同步电动机的转速;最终经过减速器把机械动力传到负载中。负载的实际位置又经过旋转变压器和RDC 模块反馈回控制计算机中,构成一个完整的闭环控制系统,实现对目标的位置跟踪。
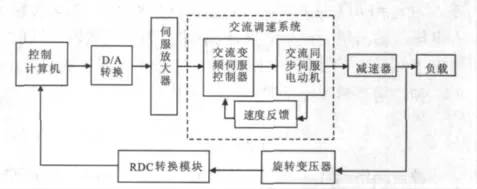
图1 交流伺服系统结构框图
2 基于RBF 神经网络的系统辨识
2.1 RBF 神经网络结构
径向基神经网络是一种局部逼近的前馈反向神经网络,其结构如图2 所示,由输入层、隐含层和输出层组成。
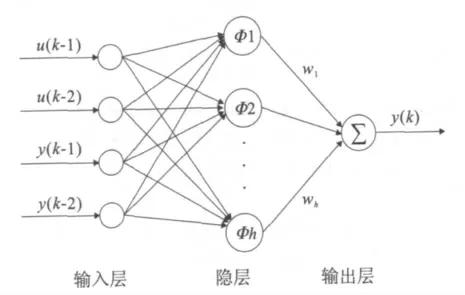
图2 RBF 神经网络结构
RBF 神经网络结构的输入层和隐含层直接相连,隐含层包括一系列径向基函数,径向基函数取如下的Gaussian(高斯)函数:

输出层通过权值与隐含层相连,网络输出值为隐含层输出的线性加权,其输出为:

其中:h—隐节点个数;
x—网络输入向量,x=(u (k- 1),u (k-2),y (k-1),y (k-2))T;
ci—第i 个隐节点的中心;
δi—第i 个隐节点的扩展常数,δi >0;
wi—输出层权值向量。
采用神经网络进行系统辨识时,网络学习时间长,不容易收敛。因此,先使用聚类方法对学习样本进行聚类处理,确定隐含层结构,然后用梯度训练法对确定的网络结构进行训练。将聚类方法与梯度训练法相结合的混合学习算法减少了网络学习时间,提高了网络学习精度。
2.2 RBF 神经网络系统辨识
在系统辨识过程中,系统输入层采用4 个节点,网络输入为xk=[u(k-1),u(k-2),y(k-1),y(k-2)],u 为输入电压。输出层为一个节点,网络输出为带负载输出轴的速度Y=y(t)。采用RBF 网络的梯度训练法训练该网络。
神经网络辨识器学习的目标函数为:
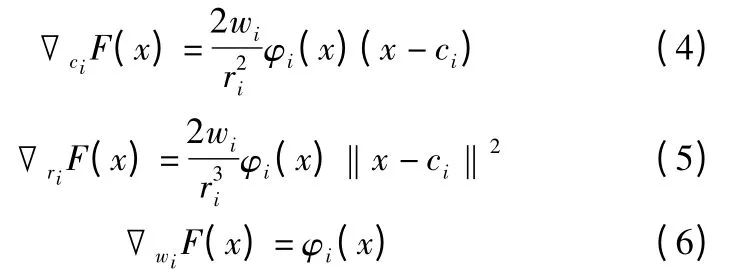
神经网络函数y=F(x)对数据中心ci,扩展常数ri和输出权值wi的梯度分别为:
考虑所有训练样本和遗忘因子的影响,ci,ri和wi的调节量为:
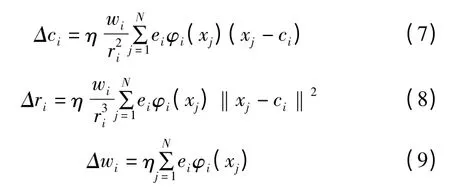
式中:φi(xj)为第i 个隐节点对xj的输出,η 为学习率。
混合学习算法流程图如图3 所示。
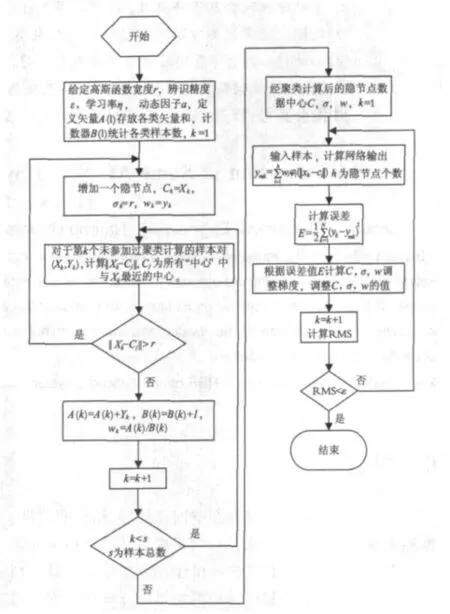
图3 聚类中心选取与梯度训练混合算法流程图
3 仿真实验结果及分析
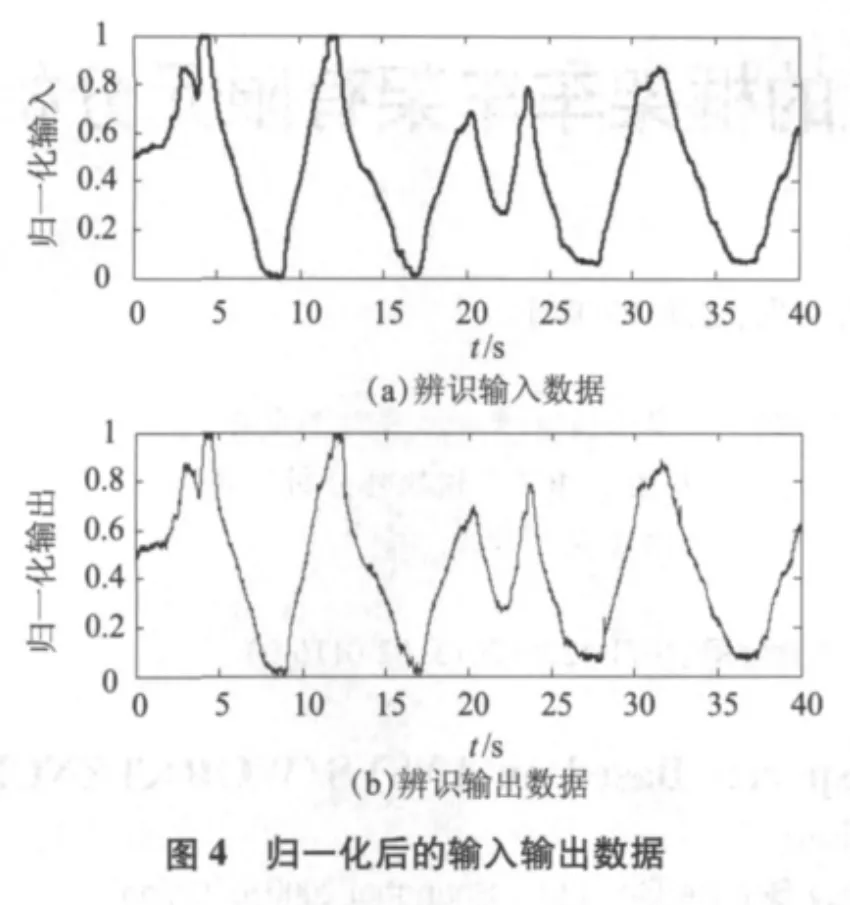
为了验证本文所提算法的有效性,对具有复杂非线性特征的某调速系统的建模进行研究。控制电压u(t)为该系统输入信号,取值范围为[-10,10]V;输出信号则采用带负载电动机输出轴的转速y(t),其取值范围为[-765,765]mil/s。采用振幅和频率均受一定限制的伪随机多幅值信号作为系统输入,共采集数据4 000 组,采样周期10 ms。为加快训练网络的收敛,统一量纲,对所有数据均进行了归一化处理。所得数据如图4 所示,(a)为输入数据,(b)为输出数据。
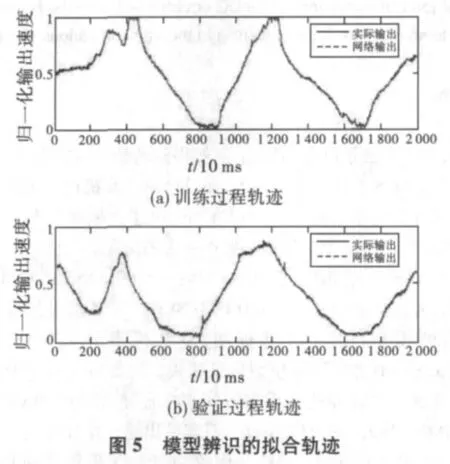
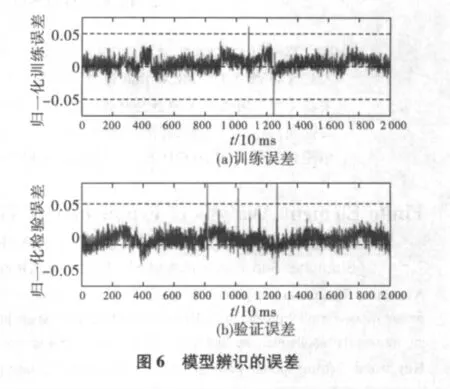
采集的4 000 组数据,前2 000 组用于模型训练,后2 000组用于模型检验,检验结果如图5 和图6 所示。图5(a)是系统实际输出与神经网络预测输出轨迹图,图5(b)是辨识模型的数据验证过程轨迹图。图6 是模型辨识过程的误差图。
由模型辨识的误差图分析可知,系统辨识模型输出误差达到辨识要求,该RBF 网络模型可用于控制仿真。
4 结论
聚类训练与梯度训练的混合算法在训练过程中确定隐含层节点数,既避免了因节点数太多造成学习时间太长,又避免了由于节点数过少导致网络输出精度不足。在确定隐节点同时,初步设定了隐含层的数据中心和扩展常数,然后在梯度训练中确定隐含层和输出层间的输出权值,这样加快了网络训练速度,并且提高了网络模型的精度。
为了验证本文RBF 神经网络器的有效性,作者以某调速系统为具体目标,做了仿真实验。仿真结果表明RBF神经网络辨识器的辨识精度达到要求精度。
[1]戚志东,朱新坚,曹广益.基于神经网络辨识的DMFC 电压模型研究[J].计算机仿真,2005,22(5):92-94.
[2]周刚,殷虎.MSG 水位特性神经网络辨识方法研究[J].计算机仿真,2006,23(3):113-116.
[3]Qi Z D,Zhu X J,Cao G Y.Neural Networks Modeling of MCFC System and Fuzzy Control Research based on FGA[A].Fifth World Congress on Intelligent Control and Auto-mation[C],2004,3:2486-2490.
[4]Sultan Noman Qasem and Siti Mariyam Shamsuddin.Improving Performance of Radial Basis Function Network based with Particle Swarm Optimization[J].IEEE Congress on Evolutionary Computation,2009:3149~3156.
[5]李国勇.智能控制及其MATLAB 实现[M].北京:电子工业出版社,2006.
[6]徐丽娜.神经网络控制[M].北京:电子工业出版社,2003.
猜你喜欢
成都信息工程大学学报(2022年3期)2022-07-21
数学物理学报(2021年6期)2021-12-21
沈阳师范大学学报(教育科学版)(2021年2期)2021-02-01
应用数学(2020年2期)2020-06-24
数学年刊A辑(中文版)(2018年2期)2019-01-08
电子测试(2017年15期)2017-12-18
自动化学报(2017年7期)2017-04-18
雷达学报(2017年6期)2017-03-26
现代电子技术(2016年15期)2016-12-01
电子设计工程(2015年6期)2015-02-27
