
基于缩微车的智能驾驶设计与研究
2013-04-07 07:46李必军
测绘通报 2013年1期
程 港,李必军
(武汉大学测绘遥感信息工程国家重点实验室,湖北武汉 430079)
一、引 言
信息化时代下,汽车工业已飞速发展,智能驾驶将是未来汽车的重要发展方向和趋势。
智能驾驶的研究工作可以大幅提高公路的通行能力,减少公路交通堵塞,降低汽车油耗,提高公路交通的安全性,有效提高交通运输效率。纵观国内外智能驾驶的发展历史,其研究过程可分为3个阶段。第1阶段是基于视觉的智能车辆导航探索性研究阶段,典型代表有美国马里兰大学等开发的ALV(autonomous land vehicle)[1]、德国联邦国防军大学的 VaMoRs[2]等;第2阶段是汽车辅助驾驶系统应用研究阶段,典型应用包括车道偏离报警、车速自适应控制、Stop&Go等;第3阶段是无人驾驶车辆整车技术的突破阶段,美国国防部高级研究计划局DARPA组织了多次无人驾驶车辆超级挑战赛[3],如斯坦福大学的 Junior[4]和CMU的BOSS[5]。自主驾驶智能车系统一般是利用传感器来获取道路场景、车辆姿态;然后通过局部路径规划和驾驶行为决策机制,确定车体控制(速度、方向、刹车)指令;行使过程中则依赖传感器获取的实时信息,结合反馈机制,实现自适应行驶控制与驾驶安全。国家自然科学基金委员会在2009年以后也每年主办中国“智能车未来挑战”比赛,吸引了国内多所知名高校和研究机构的积极参与。
由于真车的智能驾驶研究中场地和人员调度难,试验安全性低,资源消耗大,效率低,费用昂贵等原因,本研究采用基于缩微尺度的三维交通仿真环境下缩微车的智能驾驶设计与研究,意在模拟真车在真实道路环境下的驾驶行为,为真实道路环境下的智能车驾驶及车路协同系统提供可重复、可验证、可仿真的试验平台。
二、缩微车集成设计
智能汽车是利用车载传感器感知周围环境,并根据感知所获得的道路、车辆姿态和障碍物信息,控制车辆的转向和速度,从而达到安全、可靠的行驶系统。研究中所采用的缩微车模型缩微比例为1∶10,集成了摄像头、超声波、光电编码器、麦克风、惯导器件等传感器。在研究中,视觉导航为主体,由感知、决策、控制三大部分组成的集成平台,具有器件独立性、算法独立性、可扩展性、易于调试、数据可存储、软件可靠性等特点。
缩微车系统架构可分为硬件系统和软件系统两部分。缩微车硬件系统有上位机和下位机两个层次组成,上位机选用的是Intel x86凌动D525,下位机选用的是 Arduino控制主板,其主要设计构图如图1所示。

图1 缩微车硬件系统架构
图1中,从硬件层次上来讲是上位机与下位机通过RS232协议通信,把控制与感知、决策分离开来,下位机只负责采集车辆状态信息(如超声波距离、速度、角度、编码器等)和接受上位机下达的控制命令(速度和角度);上位机主要负责以下三部分工作:①感知,利用传感器获得智能车自身车载和其周围环境的数据;② 认知,从得到的传感器数据中提取出有利于指导车辆智能驾驶的信息(如车道线、障碍物、车辆姿态等),并对多源感知数据进行融合,构建局部三维场景;③ 控制,依据可靠、有用的实时信息,结合反馈机制,按照一定的规划算法给出车辆合理有效的驾驶决策,下达控制指令。从硬件功能上来讲是下位机搭载超声波传感器通过RS232协议获取前方障碍物信息,转向舵机控制车辆前轮转角,电机结合差速器控制车轮转速,光电编码器实时获取里程,惯导器件得到车身姿态和车灯LED提示转向、刹车等辅助信号;而上位机搭载两个高清摄像头获取其视角内的仿真三维道路环境,一个用来进行车道线检测和障碍物检测,另一个用来交通标志、交通灯识别,麦克风进行声音检测,无线网卡用来进行远程监控和通信。
缩微车软件系统本着易开发、可复制、模块独立、方便调试和扩展的原则,采用分层结构设计。每一个功能是一个模块,模块与模块之间是独立的,各个模块有标准的接口和相应的错误检测机制,模块间可利用进程间通信来联系,整个系统紧凑结合。同时,清晰的数据流走向也实现了各模块独立开发调试和整体测试。
缩微车软件系统软件系统分为5层,依次为数据层、认知层、规划层、控制层、人机交互层,图2为缩微车软件系统架构。
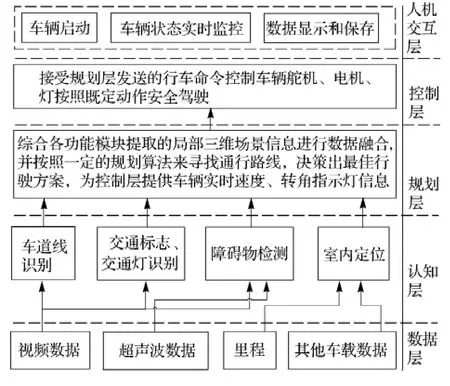
图2 缩微车软件系统架构
数据层的任务主要是通过缩微车上各类传感器收集车体自身和周围环境的数据,本系统包括视频数据、超声波数据、里程数据及其他车载数据。
认知层的任务主要是对从数据层传来的数据进行信息提取,为规划层的决策提供基础。该层是整个系统最重要也是最复杂的一层,目前包括车道线识别、交通标志及交通灯识别、障碍物检测、室内定位4个功能。其中,车道线和交通标志、交通灯的识别分别由安置在车辆顶端的不同视角的摄像头来实现;障碍物检测是结合超声波和视频数据来检测和判断动、静态障碍物、里程和其他车载数据实现室内定位功能。
规划层的任务是融合认知层的多源识别结果,按照一定的规划算法寻找通行路线,实现车辆直行、转弯、换道、超车、避障、跟驰、路口停车等一系列智能驾驶行为。
控制层的任务是接受上层下达的车辆实时速度和转角信息,并通过舵机和电机、灯来执行命令。
人机交互层的任务包括车辆启动、车辆状态实时监控及调试测试数据的显示和保存。它能实时监测到缩微车各模块的运行状态和车辆自身状况,同时记录历史数据方便离线调试和仿真。
三、核心技术研究
行驶环境融合感知、行车环境动态构建、路径规划等是无人驾驶的核心技术问题,本文从这几个方面介绍研究进展。
行驶环境融合感知技术是规划决策的基础,感知技术的好坏直接影响到车辆自动控制的效果,如何实现车辆行驶状态参数(位置、速度、航向、姿态等)和车辆行驶环境数据的多视角、全方位、动态获取一直是智能驾驶的研究难点。在缩微交通系统中,既有多车道、复杂交通路口,又存在运动目标,如车辆、行人等。因此,需要建立一个简洁完整的道路行驶环境模型。该模型下将车道、路口、车辆、行人、障碍物进行抽象表达,并结合定位信息来构建三维局部场景。其中,主要研究包括车道线检测[6]、交通标志、交通灯识别和障碍物检测等。
车道线检测首先利用摄像头获取道路信息,然后对采集到的原始图像进行数据处理,以获取赛道中车道线在图像坐标系的位置,进而得到缩微场景三维坐标系下车道线的坐标,并利用上面的关系间接计算出缩微车与车道线之间的偏角来实时分析和预测缩微车转向结果。
车道线检测研究中采用对原始实时图像数据进行色彩空间通道预处理、逆透视变换、二值化、中值滤波、hough变换、曲线拟合和缩微车摄像头标定等步骤得到如图3所示的车道线提取的特征点A和B,并拟合出车道线AB,且结合当时的位置得到车辆瞬间前进方向与车道线AB的夹角k和车体中心到该车道线的距离d。同时,根据此时刻的k值来获得缩微车需要的转向角,d值则辅助判断是否偏离车道,最终计算出控制舵机前轮偏转角度来实现车辆沿车道线的跟踪行驶。

图3 车道线识别
交通标志、交通灯对汽车驾驶过程中的转向引导、障碍物识别、道路静态信息指示起着不可或缺的作用,特别在复杂路口,它们可以有效提高道路的驾驶安全性和通行效率,所以高准确率、实时地识别道路交通标志和交通灯是智能驾驶的关键。现有的交通标识检测算法主要有:模板匹配、SVM(support vector machines)、LDA、ANN、Haar-Like and AdaBoost[7-9]。本系统是利用交通标志的形状和颜色特征,通过集成分类器进行目标检测区域,再利用支撑向量机进行分类识别,进而得到相应的交通标志信息,并用于指导车辆运动符合交通规则[10]。交通灯检测则是通过原始数据预处理、连通域分析提取、边缘检测和模板匹配等来获取交通灯的转向信息。交通标志和交通灯识别研究在于选择合适的分类器和训练过程,使算法能够克服光线变换导致的图像不同色差。这是因为距离和视场产生的不同角度和不同比例,以及高大障碍物的相对遮挡等情况会造成识别结果的低效和错误。
障碍物检测分为动目标跟踪预测和静目标检测。目前对于静态障碍物的检测方法有基于单幅图像的方法、基于光流的方法[11]和基于立体视觉的方法;动态障碍物跟踪预测有利用轮廓的方法、利用底层特征(如角点或者直线)的方法、利用区域统计特性的方法、利用三维模型的方法和利用模板匹配的方法等。本系统中采用的是超声波和视频数据融合算法来检测障碍物。由于缩微交通系统下交通环境相对真实交通较简单,其中静态障碍物主要有锥桶、静止缩微车、静止行人、绿化带等,动态障碍物主要是移动车辆和行人。这里是通过图像数据的灰度特征和锥桶、车辆、绿化带等常见障碍物的形状特征来初步识别出可能的障碍物信息,然后结合超声波实时的距离辅助判断和筛选,最终准确识别出障碍物。
局部地图构建和实时路径规划技术也是智能驾驶的关键。它的任务是按照一定的评价标准,在具有障碍物的环境内寻找一条从起始状态(包括位置和姿态)到达目标状态的无碰路径[12]。在规划层中,以车道线、交通标志、交通灯、障碍物信息、车体自身状态和室内定位信息为载体,在融合各类信息和解决冲突后以抽象和简化的原则来构建缩微车实时的动态局部地图。同时,在局部地图的基础上随时给出一条可靠的可通行路线来实现智能车的主动超车、变道和避障等驾驶行为。由于传感器无法获取全局交通环境和其自身数据相对不稳定的缺陷,因此在实时路径规划过程中需要制定详细决策规则。各类数据则可根据可靠性来分级,并结合历史数据综合分析数据缺失、数据冲突、数据错误等多种不可靠情况下的最优路径。
四、试验结果和分析
本文设计的智能缩微车系统初期,在人为设计的简易赛道中,对车辆自主直行、转弯、避障进行测试,成功地检验了基于视觉导航的智能驾驶系统。
在试验过程中,主要使用到视频数据和超声波雷达数据。在车辆控制和监控程序的启动后(如图4(a)所示),试验者可以随时看到车辆速度、转角、里程、超声波信息,视频信息则在单独的视图窗口中显示(如图4(b)所示),并能实时计算智能车行驶方向与车道线的转角、智能车几何中心点与车道线的位置偏差来获取下一时刻合理的车辆转角和速度。

图4 缩微车部分软件界面
在避障模块的测试中发现由于超声波精度低、数据粗差大、跳变剧烈的特点,会使得完全依靠单一的距离信息会出现大量误判的情况。本文采用的方法是基于视觉的障碍物检测,超声波通过自己设计的滤波器得到相对合理的信息后触发视觉系统,并根据色彩和形状特征来确定障碍物实际信息。图5(a)是未经过滤波的原始获取的距离信息,即使是距离370 mm的静态障碍物也会出现数据突变;图5(b)是经过滤波之后的同样为距离370 mm的静态障碍物,效果很好,基本剔除了粗差带来的干扰,然后可结合视觉信息进行检测,结果如图5(c)所示,最终识别并成功躲避障碍物。

图5 缩微车避障模块分析图
试验证明,在结构简单、环境干扰相对较小的室内环境下,本文所设计的缩微车智能驾驶系统工作稳定有效,车道线识别实时准确,障碍物检测相对可靠,在赛道上能出色完成各种动作(如图6所示),达到真正智能驾驶的良好效果。

图6 缩微车测试效果图
五、结束语
本文设计开发了缩微车平台进行智能驾驶的研究,不仅成功地避免真车在真实道路环境下的开发困难、成本高、测试条件苛刻的缺点,同时也为真车的算法验证搭建了一个仿真平台。该系统基于视觉导航的缩微车平台,从硬件设计、软件架构、研究思路等多方面全面考虑,并实战演练,基本实现了智能车的自主驾驶。
为了完成能适应更复杂交通环境的缩微车平台,以下问题需要得到进一步解决:测试各模块的实时性和鲁棒性,特别是车道线检测算法的准确度;注重模块与模块之间的通信效率,缩短控制周期;搭建更易配置、易扩展、易监控的系统。今后还需在缩微复杂三维场景构建、高精度定位技术、多车交互、车路交互方面作更深入的研究,以实现更加智能的无人驾驶科技。
[1] 知远战略与防务研究所.未来战斗系统中的无人平台[EB/OL].[2003-12-01].http:∥www.defence.org.cn/aspnet/vip-usa/uploadfiles/200499123112935.pdf.
[2] ANDRESEN F,DAVIS L,EASTMAN R,et al.Visual Algorithms for Autonomous Navigation[C]∥Proc.of IEEE Int’l Conf.on Robotics and Automation.Maryland:[s.n.],1985:856-861.
[3] MONTERMERLO M,BECKER J,BHAT S,et al.Junior:The Stanford Entry in the Urban Challenge[J].Journal of Field Robotics,2008,25(9):569-597.
[4] NXP.About NXP Semiconductors[EB/OL].[2011-09-06].http:∥www.cn.nxp.com/infocus/topics/darpa/.
[5] SARAH G.Boss Wins DARPA’S Urban Challenge[EB/OL].[2007-11-21].http:∥ thefutureofthings.com/news/1038/boss-wins-darpas-urban-challenge.html.
[6] 陈龙,李清泉,毛庆洲.基于成像模型的车道线检测与跟踪方法[J].中国公路学报,2011,24(6):97-102.
[7] VAPNIK V N.The Nature of Statistical Learning Theory[M].New York:Springer,2000:123-170.
[8] BLEI D M,NG A Y,JORDAN M L.Latent Dirichlet Allocation[J].Journal of Machine Learning Research,2003(3):993-1022.
[9] CHANG W C,CHO C W.Online Boosting for Vehicle Detection[J].IEEE Transactions on Systems,2010,40(3):892-902.
[10] WANG Chunxiang,JIN Tao,YANG Ming,et al.Robust and Real-time Traffic Lights Recognition in Complex Urban Environments[J].International Journal of Computational Intelligence Systems,2011,4(6):1383-1390.
[11] 丛杨,唐延东.基于光流方程和目标匹配的视频图像目标跟踪方法[J].红外与激光工程,2006,35(4):312-315.
[12] 胡彬,王冰,王春香,等.一种基于时间窗的自动导引车动态路径规划方法[J].上海交通大学学报,2012,46(6):59-63.
猜你喜欢
卫星应用(2021年11期)2022-01-19
科学大众(2021年9期)2021-07-16
中国交通信息化(2020年11期)2021-01-14
动漫界·幼教365(中班)(2020年3期)2020-04-20
铁道通信信号(2020年9期)2020-02-06
电子制作(2019年12期)2019-07-16
儿童故事画报·发现号趣味百科(2017年9期)2018-03-13
文学少年(有声彩绘)(2017年1期)2017-02-14
电子制作(2016年21期)2016-05-17
中国交通信息化(2015年10期)2015-06-06
