
平面四杆机构急回特性的讨论及应用
2013-04-02 03:54程引正
机械研究与应用 2013年6期
程引正
(武威职业学院,甘肃武威 733000)
1 引言
急回特性是平面四杆机构基本特性之一,急回运动的程度一般用行程速度变化系数K来比较。笔者主要从平面四杆机构的急回原理、表示方法、判断条件、以及急回特性在工程机械上应用等方面,结合具体事例加以初步研究和讨论,以便合理地进行机构设计和使用。
2 平面四杆机构急回特性的分析[1]
图1所示为曲柄摇杆机构,当曲柄AB为原动件作等速回转时,摇杆CD为从动件作往复变速摆动,曲柄AB在回转一周的过程中有两次与连杆BC共线,此时摇杆CD分别处于C1D和C2D两个极限位置。摇杆CD在两个极限位置的夹角ψ称为摆角,曲柄AB与连杆BC两次共线位置之间所夹锐角θ称为极位夹角。
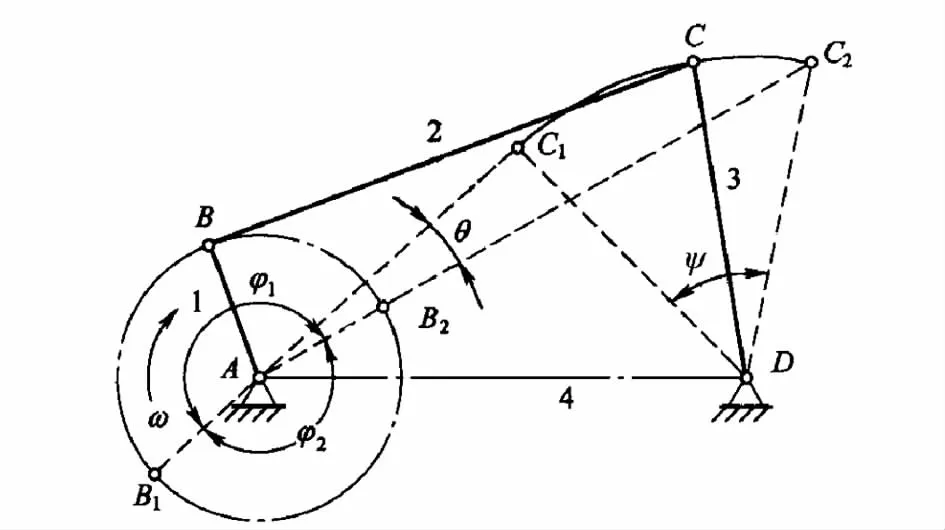
图1 曲柄摇杆机构1.曲柄 2.连杆 3.摇杆 4.机架
当曲柄AB顺时针以等角速度ω从AB1转到AB2时,转过角度 φ1=180°+θ,摇杆 CD从左极限位置C1D摆动到右极限位置C2D,即转过摆角ψ,此行程若做功,则称为工作行程,其所需时间为 t1,即t1=(180°+θ)/ω,即 C 点的平均速度 v1=C1C2/t1;
当曲柄AB继续顺时针从AB2位置转到AB1时,转过角度 φ2=180°-θ,摇杆 CD从 C2D又摆回到C1D,此行程若不做功,则称为空回行程,其所需要时间为t2,即t2=(180°-θ)/ω,C 点的平均速度为 v2,即v2=C1C2/t2。
显然 φ1>φ2,于是 t1>t2,故 v2>v1,由此可知,当曲柄等速回转时,摇杆往返摆动的速度不同,在摆回来时有较大的角速度,表明机构具有急回运动特性。
3 平面四杆机构急回特性的表示[2]
机构的急回特性可以用行程速度变化系数K来表达:

由上式可知,行程速度变化系数K与极位夹角θ的有关,θ越大,K越大,急回运动的性质也越显著,机构的传动平稳性下降。
由式(1)可得极位夹角:

由于0°≤θ≤90°,所以 1≤K≤3,上述公式限制了平面四杆机构的急回特性,其设计方法仅适用于K≤3的机构。
在设计具有急回性质的平面四杆机构时,通常根据工作需要选定K值,由式(2)可以计算出极位夹角θ,然后再确定各构件的尺寸。
4 平面四杠杆机构急回特性的判断[3]
(1)判断机构有无急回特性,关键是机构中哪个构件为主动件。从图1机构位置分析可以看出,对于曲柄摇杆机构而言,当曲柄为原动件时,曲柄AB在回转一周的过程中有两次与连杆BC共线,摇杆CD分别处于C1D和C2D两个极限位置,存在急回特性;当以摇杆为主动件时,曲柄与连杆虽然有两次共线位置,不会出现急回特性,但是,会出现死点位置,应设法消除死点问题。
(2)机构的急回特性与行程速度变化系数K有关。由式(1)可知,极位夹角θ越大,行程速度变化系数K值越大,急回特性愈明显,生产效率愈高。
(3)铰链四杆机构有无急回运动特性取决于该机构有无极位夹角θ。当极位夹角θ=0°时,行程速度变化系数K=1,说明机构没有急回特性。
如图2所示的对心曲柄滑块机构,偏心距е=0时,θ=0°,K=1,该机构没有急回特性。

图2 对心曲柄滑块机构
综上所述,对于同一机构,选择不同连架杆作为原动件,则机构有无急回特性情况就不一样,关键问题在平面四杆机构中,只有曲柄AB作为原动件时摇杆CD才有急回特性。具有急回特性的机构,除了曲柄摇杆机构外,还有偏置曲柄滑块机构(如图3所示,е≠0时,θ≠0°,K>1)和摆动导杆机构(如图4 所示)等。
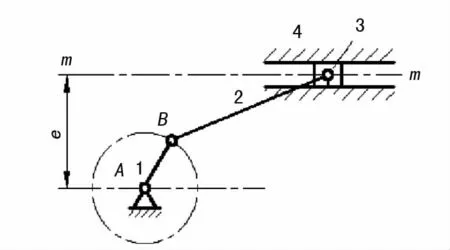
图3 偏置曲柄滑块机构
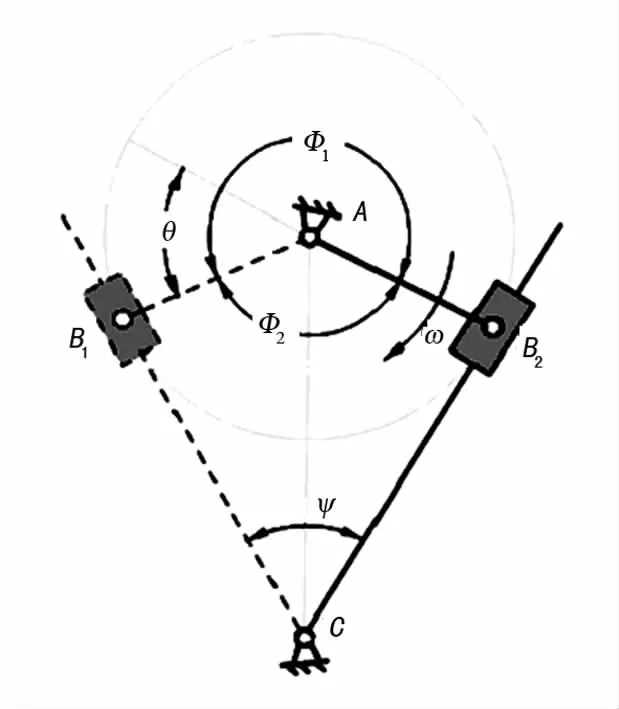
图4 摆动导杆机构
5 平面四杆机构急回特性的应用[4]
图4所示的摆动导杆机构,就是牛头刨床的主运动机构利用平面四杆机构急回特性工作的典型事例,将慢行程作为工作行程,快行程作为空回行程,既能保证工件质量,又能节省动力,缩短非生产时间,提高生产效率。
运动原理:当曲柄AB绕A点等角速度ω转动时,摆杆BC以C为基点来回摆动。在曲柄AB转动一整周的过程中,摇杆 BC分别有两个极限位置B1C、B2C。此时机构的极位夹角等于摆角,即θ=ψ。当曲柄AB顺时针等角速度ω从AB1转到AB2时,转过角度φ1=180°+θ,摇杆BC从左极限位置B1C摆动到右极限位置B2C,摆过角度为ψ,此行程为工作行程,其所需时间为 t1,即 t1=(180°+θ)/ω,B 点的平均速度v1;当曲柄AB继续顺时针从AB2位置转到AB1时,转过角度 φ2=180°-θ,摇杆 BC从 B2C又摆回到B1C,摆过角度仍为ψ,此行程为空回行程,其所需要时间为 t2,即 t2=(180°+θ)/ω B点的平均速度为v2。
显然 φ1>φ2,于是 t1>t2,故 v2>v1,表明摇杆在摆回过程中速度快,牛头刨床的主运动机构具有急回运动特性。
6 结语
通过上述分析,在平面四杆机构中,曲柄摇杆机构、偏置曲柄滑块机构、摆动导杆机构具有急回特性,而且急回特性的程度是固定不变的,对心曲柄滑块机构则无急回特性。
只有系统地分析和研究平面四杆机构的急回特性,才能加深对机构基本特性的理解和掌握,提高我们运用平面四杆机构急回特性的能力,来缩短机械运行时的空载行程时间,以提高生产率。
[1] 陈立德.机械设计基础[M].北京:高等教育出版社,2009.
[2] 罗玉福,王少岩.机械设计基础[M].大连:大连理工大学出版社,2008.
[3] 黄锡恺.机械原理[M].第6版.北京:高等教育出版社,1989.
[4] 边 巍.平面四杆机构急回特性分析[J].机械工程师,2010(9):52-53.
猜你喜欢
机械工程师(2021年4期)2021-04-19
南方农机(2021年3期)2021-02-07
中学生数理化·七年级数学人教版(2020年12期)2021-01-18
湖北农机化(2020年17期)2020-11-02
语数外学习·高中版上旬(2020年8期)2020-09-10
机电工程技术(2020年2期)2020-03-26
设备管理与维修(2019年22期)2019-12-19
机械研究与应用(2018年5期)2018-11-05
西南石油大学学报(自然科学版)(2018年4期)2018-08-02
中南大学学报(自然科学版)(2016年2期)2017-01-19

- 机械研究与应用的其它文章
- 一种6自由度装校机器人工作空间分析
- 量化注入式泡沫灭火系统的设计*