
一种新的红外机动目标识别算法
2013-04-01 05:26李一波齐万旭
激光与红外 2013年3期
李一波,齐万旭
(沈阳航空航天大学自动化学院,辽宁沈阳110136)
1 引言
随着红外成像技术的发展,红外目标识别技术已经被广泛的应用[1]。许多模式识别方法已经成功的应用在了红外目标识别技术中[2-3]。BP神经网络因其具有很好的自组织、自学习,能对信息分布存储且并行处理信息等优点而被广泛的应用在模式识别领域。然而,传统的BP神经网络算法存在易陷入局部极小值、收敛速度慢等问题。一些研究者为了弥补BP神经网络算法的不足,将一些群体智能算法与BP神经网络算法相结合,在很大程度上改善了BP神经网络算法的不足[4-5]。细菌觅食优化算法(bacteria foraging optimization algorithm,BFOA)[6]作为群体智能算法之一,自从被提出以来,因其具有并行搜索、易跳出局部极值等优点并且由于其构造的直观性等特点,它已经被应用在许多工程领域[7-9]。然而,将基本的 B FOA 作为优化工具处理高维问题时,其收敛精度和速度都明显下降。因此本文通过自适应BFOA优化BP 神经网络来弥补BP神经网络易陷入局部极小值、收敛速度慢等缺陷。
本文以坦克目标作为识别对象,通过大量的研究对比发现,在红外图像中,不同类型的坦克其履带部分的结构类似,并且在实际战场环境中,坦克的下部很容易被遮挡,因此不适合作为分类识别的特征信息。同时,红外图像与可见光图像相比存在目标与背景灰度对比度低、目标轮廓不清晰等不足[10]。因此,本文通过去除坦克目标的下部分区域信息,根据目标在图像中的左右两个极点及其上部分的边缘信息通过局部区域面积比构造特征向量,从而降低边缘信息不精确的影响。通过本文提出的特征提取方法与优化BP神经网络方法相结合,实现了对未被遮挡的目标和局部被遮挡的目标的有效识别。
2 细菌觅食优化BP神经网络
2.1 细菌觅食优化算法
BFOA[6]是根据人体内大肠杆菌的生物行为提出的一种全局范围内随机搜索最优解的算法。细菌觅食行为包括寻找营养区域并决定是否进入这个区域搜索食物,决定继续在当前区域搜索食物还是寻找其他营养更丰富的区域。细菌的整个生命过程中都在以游动和翻转两种方式交替的进行运动。细菌通过翻转运动通常产生一个随机的运动方向,但是这种随机方向会倾向于偏向前面游历过的区域,因此它是一种有偏向的随机游动。BFOA根据细菌的觅食行为提出的主要通过趋向性操作、群聚操作、复制操作以及迁徙操作来迭代计算求解问题。下面对此四种操作加以简述。
2.1.1 趋向性操作
通常情况下,细菌通过其表面的鞭毛在营养丰富的区域进行较多的游动,在营养较匮乏的区域进行较频繁的翻转。BFOA依据细菌的这种行为称为趋向性行为。规定细菌种群的范围为S,用N维向量 θi=[θi1,θi2,…,θiN]表示细菌个体i的位置信息,同时也是求解问题的一个候选解,则趋向性行为可表示为:

其中,θi(i,k,l),i∈S 表示细菌种群 S 中细菌 i在经过了第j次趋向性操作第k次复制操作第l次迁徙操作后的位置信息;C(i)表示游动的单位步长;ø(j)表示翻转之后确定的一个随机游动方向。
2.1.2 群聚操作
细菌在按照自身的方式移动的同时也受到种群中其他细菌个体对其发出的吸引和排斥信号,使其有向种群中心移动的趋势同时也与其他个体保持一定的距离,这种细菌的群聚性在BFOA中表示为[11]:

其中,Jcc表示细菌个体受种群的影响值;P(j,k,l表示种群 S中所有个体的位置信息。dattract,ωattract,hrepellent和ωrepellent是表示吸引和排斥的参数值。
综合考虑种群中第i个细菌自身的移动方式及受细菌种群影响两方面因素经过一次趋向性操作得到更新的适应度函数值为:

2.1.3 复制操作
整个细菌种群的所有个体经过趋向性操作之后,计算并排列所有细菌个体的适应度值,淘汰掉种群中适应度值差的S/2个细菌个体,并复制适应度值好的S/2个细菌个体以保证种群总体数量的不变,被复制出来的新的细菌个体与适应度值好的S/2个细菌个体具有相同的位置信息。
2.1.4 迁徙操作
迁徙操作能够有效地辅助趋向性操作,当细菌个体所处的环境不适宜其生存时,它将以一定的概率发生迁徙,即在解空间的其他位置产生新个体并且原个体消失。这样保证了趋向性操作过程跳出局部最优解进行全局寻优。
2.2 BP 神经网络
典型的BP神经网络如图1所示,有一个输入层、一个输出层并且至少有一个中间隐含层,每一层的各个节点都通过权值连接到下一层的所有节点。隐含层的多少没有理论上的限定,但是通常情况下隐含层一般为一层或者两成。

图1 典型BP神经网络结构
在BP神经网络中通常选择式(4)可微的Sigmoid函数最为输出函数,通过等式(5)计算出神经网络中期望输出T与实际输出O之间的方差E。

其中,M为输出节点个数;N为训练样本个数。
BP神经网络因其自身的非线性结构特点使其能够以很小的误差很好的逼近复杂的连续函数,并且具有很强的自学习能力,但是因为其通用梯度法修正权值,使其存在易陷入局部极小点,不能保证全局收敛,泛化能力不强等缺点[12]。
2.3 ABFO训练BP神经网络
鉴于上述传统的BP神经网络存在的缺点和不足,本文采用自适应趋向性步长的细菌觅食算法[13]训练BP神经网络(adaptive bacterial foraging optimization in BP neural network,ABFONN),从而避免其陷入局部极小点的情况发生并且提高收敛速度。ABFONN模型由三维空间D={N,S,Tmax}构成,其中N是由BP神经网络结构根据式(6)得到的所有连接权值及所有隐含层和输出成层的阈值组成的元素个数为n的搜索空间向量,S取为能被2整除的种群规模向量,Tmax为趋化次数Nc、复制次数Nre与迁徙次数Ned的乘积,即为ABFONN的最大迭代次数。式(5)作为细菌的适应度函数。

其中,I为网络中输入节点数;H为网络中隐含节点数;O为网络中输出节点数。
在ABFONN的随机初始化步骤中向量N和向量S中的所有元素的值是由[0,1]内产生的随机数。
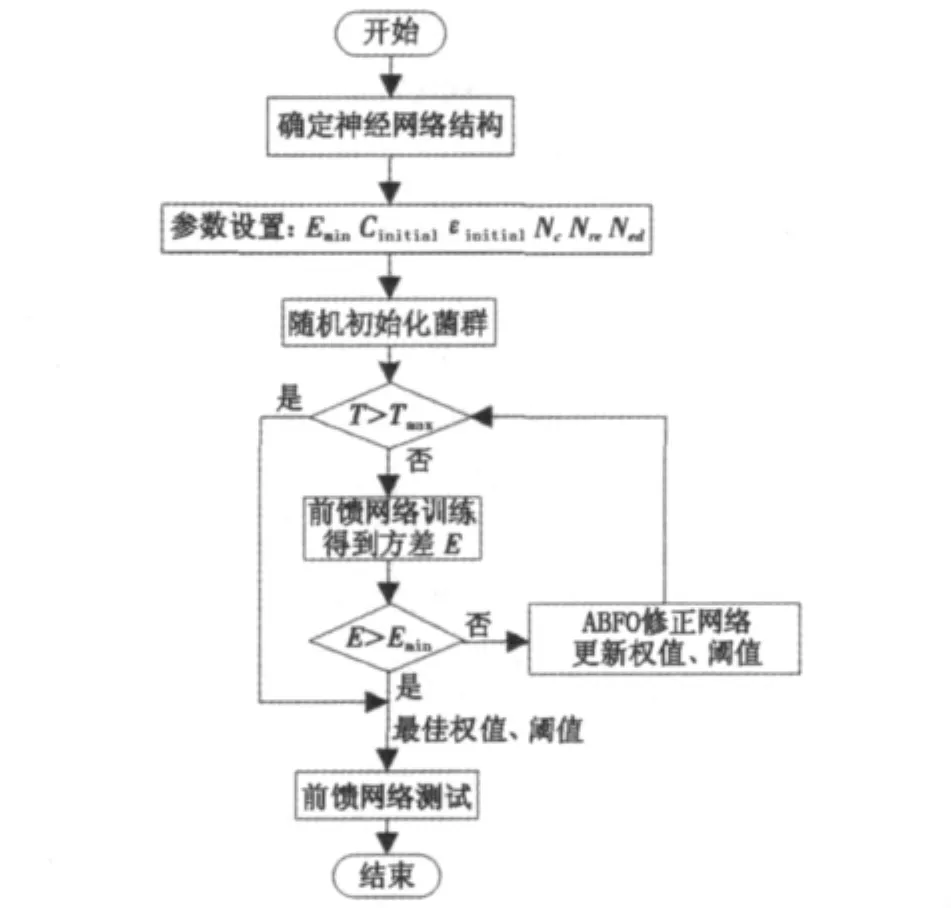
图2 ABFONN流程图
图2 所示为ABFONN流程图,其中,Emin为网络训练的最小期望方差,Cinitial和εinitial为细菌个体的初始步长和初始精度目标,T为ABFONN从第一次到最大次Tmax的计数。
3 特征提取
文献[14]利用机动目标的边缘信息构建特征量,但是红外图像获取过程中目标图像衰减比较明显,并且因机动目标发热不均的特性等所致红外图像中目标的边缘比较模糊,因此本文提出一种以目标的局部区域信息构造特征量的方法从而很大程度的降低了目标边缘模糊对识别效果的影响。本文以坦克作为识别对象,通过对比不同类型坦克数据可知不同类型坦克的主车体部分结构类似,而车体上的炮塔部分外形差别明显。本文根据不同类型坦克的结构特点并充分考虑到实际作战战场的环境复杂性,提出一类能有效识别局部被遮挡坦克目标的特征量。本文特征量的提取以图3所示对图4(a)中的坦克目标进行特征提取为例加以详述。

图3 特征提取方法
进行特征提取时,去除了坦克的主炮,因为不同类型的坦克其主炮类似并且通过战场环境获取的带有强烈噪声的图像中很难精确的提取出主炮部分。图3所示为图4(a)中坦克去除主炮的二值图像,并将特征提取的构建方法附加其上。图3中所示,a点为目标区域的极左点,若存在横坐标相同纵坐标不同的多个极点时,选取纵坐标值大的点作为极点,即选取的极点较其他相同横坐标的点在目标上的位置更高,b点为目标区域的极右点,其选取的原则与取极左点相同。o点为直线段ab的中点,过o点作直线段ab的垂线交ab以上的目标边缘于c点,c'点为直线段oc的中点,以c'点为顶点c'c为角平分线作直角分别交目标边缘于f,g两点,d点为/aoc的角平分线与目标边缘的交点,d'为直线段od的中点,同样以d'点为顶点d'd为角平分线作直角分别交目标边缘于h,i两点。用上述同样的方式得到e点及直角je'k。

通过上述构造的线段及点建立体现全局特征的特征量。设整个坦克目标区域的面积为S,即S为目标区域像素点个数,局部区域 abca的面积为Sabca,同样定义面积全局特征量定义为:


根据式(7)和式(8)建立的全局特征量和局部特征量组成特征向量为:

上述局部特征的建立仅仅需要目标的左右极点及两极点上部的目标边缘信息,因此即使目标的局部区域被遮挡也能建立完整的局部特征量,并且通过边缘等信息建立的面积比值方法能很好的降低因目标边缘模糊使信息不精确造成的影响。
4 实验结果及分析
4.1 神经网络训练及测试
本文以某军区实战演习的坦克红外图像组成训练样本集和测试样本集。训练样本集由两种类型坦克组成,每类坦克选取80幅图像,其中包括未被遮挡的坦克红外图像40幅,坦克局部被遮挡的红外图像40幅,另选取40幅带有虚假目标的图像。用于测试的样本集有两个,一个样本集中选取未被遮挡的两类目标图像各60幅,另选取30幅带有虚假目标的图像,另一个样本集选取局部被遮挡的两类目标图像各60幅,同样选取30幅带有虚假目标的图像。样本集的部分图像如图4所示。
实验以MATLAB软件编程实现,用ABFONN、基本的BFOA训练BP神经网络方法(BFONN)和标准BP网络(BP-gd)进行训练并通过测试比较。BP神经网络的输入节点根据本文提出的特征提取方法设置为10个,20个节点的单个隐含层,输出节点3个。ABFONN的初始化参数如表1所示。设BFONN的固定步长C为0.1,其他参数与ABFONN相同。对3种算法进行20次独立运行。同时,本文以文献[14]中的特征提取方法,用4个全局特征量和12个局部特征量经过高斯分布归一化组成一组特征向量,同样以上述训练样本和测试样本对ABFONN,BFONN和BP-gd进行训练并测试,此时的网络隐含层节点数设定为36个,输出节点仍为3个,根据公式(6)设置在BFONN和ABFONN中的搜索空间维度N均为795,其他参数与表1相同。
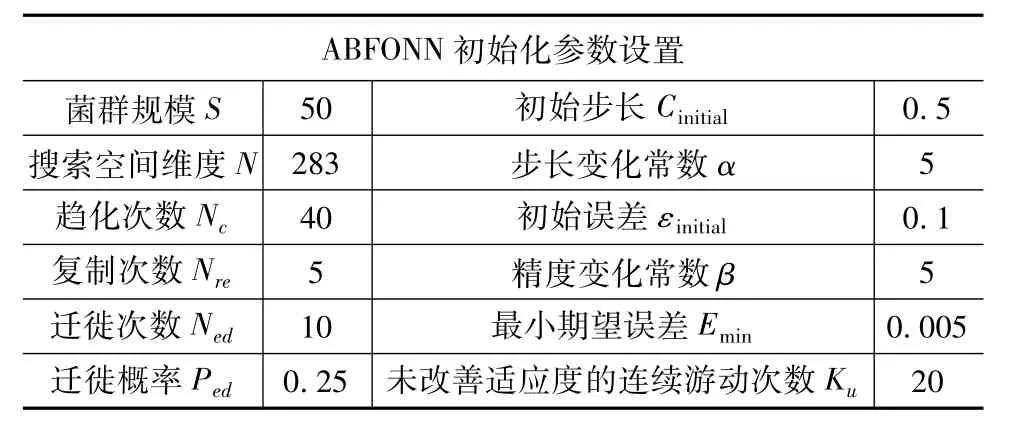
表1 ABFONN的初始化参数
4.2 训练及测试结果分析
表2所示为3种算法分别用文献[14]和本文中的提取方法得到的特征向量经过20次运行后得到的迭代次数与训练误差的平均值。从表中可以看出,ABFONN在迭代次数上与BFONN和BP-gd相比具有明显优势,ABFONN的训练误差也明显小于BP-gd。同时,通过表中两种特征量的训练结果比较可以看出,应用本文提出的特征提取方法用较少的迭代次数就能达到与文献特征提取方法相同的训练精度。

表2 3种算法迭代次数与训练误差(文献方法/本文方法)
表3所示分别为用文献[14]和本文中的特征提取方法得到的特征向量通过BP-gd,BFONN和ABFONN三种算法训练的神经网络对测试样本进行测试得到的结果。从表中可以看出,经过ABFONN训练得到的神经网络对目标的识别效果要优于BFONN和BP-gd,本文的特征提取方法与文献[14]中的方法相比在识别效果上为理想,不仅对未被遮挡的目标有更高的识别率,同时,对局部被遮挡目标也能有效的进行识别。

表3 文献和本文的特征提取方法的识别结果(BP-gd/BFONN/ABFONN)
5 结论
通过实验证明,本文应用的自适应步长BFOA对BP神经网络进行训练与BFONN和标准BP网络相比,能通过更少的迭代次数得到更为精确的神经网络。同时,经过实验验证,本文提出的特征提取方法应用于红外机动目标的识别上也有较为理想的效果,并且对于目标存在局部被遮挡的情况也能有效的对其进行识别。实验结果表明,本文提出的特征提取方法及识别方法应用在红外机动目标识别中具有一定的实用价值。
[1] Coutts-Lendon C A,Wright N A,Mieso E V,et al.The use of FT-IR imaging as an analytical tool for the characterization of drug delivery systems[J].Journal of Con-,2003,93(3):223 -248.
[2] Ge Fengwen.Application of SVM classifier in IR target recognition[J].Physics Procedia,2012,24:2138 -2142.
[3] Wang Xiaojian,Ma Ling,Fang Xiao,et al.Knowledgebased automatic recognition technology of radome from infrared images[J].Proc of SPIE,2009,7383:1 -6.
[4] Li Hui,Hu Caixia,Li Ying.Application of the purification ofmaterials based on GA -BP[C]//International Conference on Future Electrical Power and Energy Systems,2012:762-769.
[5] Zhang Jingru,Zhang Jun,Lok TM,etal.A hybrid particle swarm optimization-back-propagation algorithm for feedforward neural network training[J].Applied Mathematics and Computation,2007,185(2):1026 -1037.
[6] Passino K M.Biomimicry of bacteria foraging for distributed optimization and control[J].IEEE Control Systems Mag,2002:52 -67.
[7] Tripathy M,Mishra S.Bacteria foraging-based to optimize both real power loss and voltage stability limit[J].IEEE Transactions on Power Systems,2007,22(1):240 -248.
[8] Kim D H,Cho JH.Adaptive tuning of PID controller for multi-variable system using bacterial foraging based optimization[C]//LNCS 3528:AWIC 2005,2005:231-235.
[9] Chatterjee A,Matsuno F.Bacteria foraging techniques for solving EKF-based SLAM problems[C]//Proc International Control Conference(Control 2006),Glasgow,UK,2006.
[10] Sun Xinde,Bo Shukui,Li Lingling.Study of infrared image clutter suppression based on background estimation[J].Laser & Infrared,2011,41(5):586 -590.(in Chinese)孙新德,薄树奎,李玲玲.基于背景估计的红外图像杂波抑制方法研究[J].激光与红外,2011,41(5):586-590.
[11] Das S,Biswas A,Dasgupta S,etal.Bacterial foraging optimization algorithm:Theoretical foundations,analysis,and applications[J].Foundations of Comput Intel,2009,3:23-55.
[12] Chauvin Y,Rumelhart D E.Backpropagation:Theory,architectures and applications[M].Erlbaum,Mahwah,NJ.1995:561.
[13] Chen Hanning,Zhu Yunlong,Hu Kunyuan.Self-adaptation in bacterial foraging optimization algorithm[C]//2008 3rd International Conference on Intelligent System and Knowledge Engineering(ISKE 2008),2008:1026 -1031.
[14] Sun SG,Park H W.Automatic target recognition using boundary partitioning and invariant features in forwardlooking infrared images[J].Optical Engineering,2003,42(2):524-533.
猜你喜欢
学与玩(2022年8期)2022-10-31
环球时报(2022-05-23)2022-05-23
金桥(2021年4期)2021-05-21
小学生学习指导(小军迷联盟)(2020年12期)2021-01-05
电子制作(2019年7期)2019-04-25
电子制作(2018年19期)2018-11-14
科技知识动漫(2017年5期)2017-05-11
自动化学报(2017年11期)2017-04-04
光学精密工程(2016年3期)2016-11-07
噪声与振动控制(2015年4期)2015-01-01
