
FAST促动器性能测试在线监测系统*
2013-03-29 03:35:56王启明吴明长
天文研究与技术 2013年3期
孙 晓,王启明,吴明长
(中国科学院国家天文台,北京 100012)
FAST促动器性能测试在线监测系统*
孙 晓,王启明,吴明长
(中国科学院国家天文台,北京 100012)
根据FAST主动反射面需求评估了对促动器性能的要求,依促动器评估参数需求设计了针对电流、功率、温度、负载、位移、限位信号的监测系统,确定各监测信号传感器选型,完成监测系统的组装制作,并将其应用于实验,实现促动器的在线监测功能以及促动器无人值守实验,针对以往促动器实验时人工巡检故障的离线监测有很大改进,在精度以及历史信息记录上都有质的提高,进行了长期的促动器调试与监测。
FAST;射电望远镜;促动器;在线监测;传感器;系统设计
500m口径大型射电望远镜(Five-hundred-meter Aperture Spherical Telescope,FAST)[1-2]主动反射面地处贵州省南部的卡斯特洼地中,该地雨水较多,洼地内常年湿度较大,主动反射面主体支撑结构是约7 000根主索按照短程线型网格方式编织而成索网结构。其结构索网模型轴视如图1。主动反射面的变形是由与索网节点通过下拉索相连接的促动器实现的,如图2。

图1 FAST主动反射面索网支撑结构轴视图Fig.1 Axis view of the support structure of the adaptive reflectors of the FAST
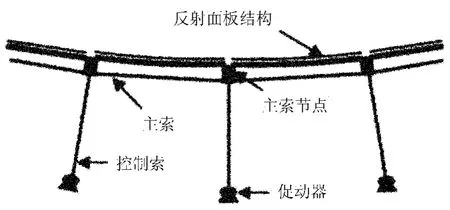
图2 FAST主动反射面各部件连接示意图Fig.2 Illustration of the structure units of an adaptive reflector of the FAST
由图可以很清楚地看到,每一个主索节点都有一促动器与其相连,从而实现反射面的整体变形[3],这样的促动器,在FAST主动反射面系统中,要使用大约2 300台。因此,促动器的正常运行,对于FAST主动反射面的整体工作性能有着至关重要的影响,使得在促动器选型时需要客观合理地评估不同的促动器方案,监测其在各种工作模式下的相关运行参数,为方案的选型提供科学可靠的依据。
1 监测系统设计需求
1.1 监测系统设计必要性
在以往的促动器实验中,往往是使用人工巡检的方式定期检验运行中的促动器是否发生故障,导致促动器在发生故障后,不能及时反应故障信息,很难合理地评估其故障发生的真正起因。同时人工巡检要求促动器实验时必须有人值守,这也大大限制了促动器的不间断运行测试条件。
即便采用部分自动监测仪器,也因为仪器的监测能力限制导致记录信息不完善,数据同步能力差,使得监测数据参考价值较低。所以这里需要确定FAST工程促动器选型实验时所需监测的各项参数[4],针对不同参数选择合适的传感器,并将不同类型的传感器进行整体组装设计一套可以完成这项任务的在线自动监测系统,做到在促动器的无人值守实验,并对实验历史信息进行记录。
1.2 监测系统需要评估参数
促动器主要有电动促动器以及液压促动器两种,也称电动缸和液压缸,主要功能是通过丝杠的旋转将电机的旋转运动或者液压动力转换为直线运动,提供直线推拉力的执行机构[5]。
FAST促动器有多种选型方案,而在促动器实验时所需要测评的指标有:运行速度、控制精度、负载能力、耐环境能力、已经无故障工作时间等。
针对促动器性能指标,可确定监测系统所需要监测评估的具体参数应为:电机电流、电机功率、电机温度[6]、相关驱动设备温度、环境温度、促动器负载[7]、促动器位移、限位信号。
2 监测系统设计
为了满足促动器监测评估的需求,选用了监测相应参数的传感器,并对其进行组装整合设计成为一套监测系统,与工控机通讯,使用工控机实时接收记录促动器的各项运行指标,实现自动监测,可进行长期无人值守实验测试。
2.1 系统结构
监测系统结构如图3。

图3 促动器监测系统工作结构图Fig.3 Block diagram of themonitoring-management system of the actuators
其中电流、功率、温度、零点信号以及限位信号由相应的传感器采集以后通过数模转换将信号发送给工控机。
促动器负载要求较为严格,在实验时需严格监控促动器负载状态,一旦超载将很可能造成设备的损坏甚至发生危险。由精度高且测量准确的专用设备进行采集,在实现本地记录与显示的同时,将信息发送给工控机。
促动器的直线位移信号,由安装于促动器低端的旋转编码器进行采集,工控机通过编码器采集卡进行接收。之后对系统进行整体组装,安装于控制柜内,增强其耐环境能力与便携性。
2.2 传感器选型
根据促动器资料可知,所使用电机功率大约为600W,当为380 V三相异步电机时,其线额定工作电流由公式S=UI可知大约为1 A,对于这种小容量三相异步电机,即便在使用直接启动的情况下,启动电流也不超过7倍即7 A。由此可确定传感器量程以及选型如下。
电流变送器:选用型号为I414S41的电流变送器,感应式穿心输入,安全方便、高精度、微功耗;频响范围25 Hz~5 kHz,特别适应于工频至中频的电流测量;输入量程为0.5 A~8 A,输出4~20 mA电流信号。在输出端并联阻值为250Ω的精密电阻,使之转化为1~5 V电压信号。
功率变送器:由于促动器的选型不同,电机也有三相和单相的不同,所以在选择功率变送器时应考虑两种情况,在对应不同的促动器实验时,相应的更换功率测量模块。所选用的单相有功功率变送器型号为P114S91,而三相有功功率变送器型号为P214P75,两者输入范围为电压≤500 V,电流≤50 A,输出4~20mA电流信号。在输出端并联阻值为250Ω的精密电阻,使之转化为1~5 V电压信号。
温度传感器:温度信号的测量使用铂电阻与温度变送器组合而成,温度变送器型号为HT-132D,其测温范围为-50℃~+150℃,输出4~20mA电流信号。在输出端并联阻值为250Ω的精密电阻,使之转化为1~5 V电压信号。
接近开关:因PNP型接近开关输出信号为电流信号,方便信号的统一与使用,固选用型号为AL-39P的接近开关,其为三线制24 V供电,其输出信号线在动作时输出的为24 V电源电平。固使用电阻将其分压,如图4,可得到0~4 V左右的开关量信号。
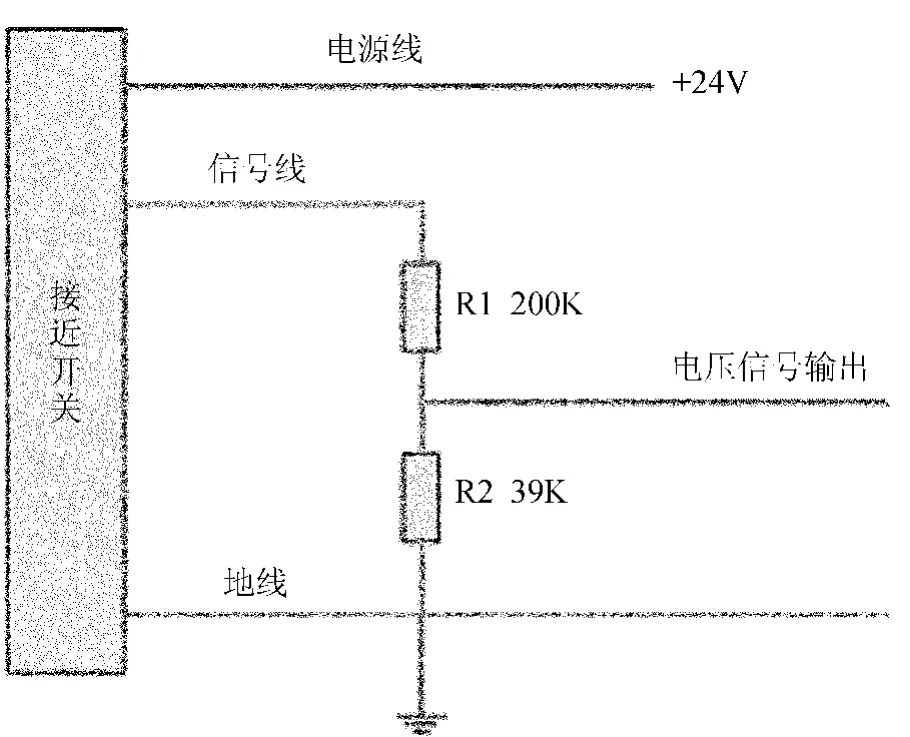
图4 接近开关信号电平转换电路Fig.4 The signal-level switch circuit of the proximity switch
数模转换:选用型号为RSM3802的数据采集模块,其在单个设备中集成了I/O、数据采集和隔离的RS-485总线接口。可以同时采样8路的差分信号,采样分辨率为12位,完全满足监测系统的要求。且对输入输出端口采用电气隔离,并采用带隔离的RS-485总线接口及看门狗技术,有效保障设备安全可靠运行。
旋转编码器:选用光洋增量式光电编码器,将编码器安装于促动器丝杠末端,其可将旋转位移转化为数字脉冲,通过工控机上的编码器卡将脉冲发送到主机,通过频率即可计算获得促动器的直线位移。作为增量式编码器,其相对于绝对编码器,在价格上有着很大的优势,而且位移记录精度足够满足需求。
压力传感器:选用型号为NS-YB05C型拉压力传感器,量程为100 KN,性能稳定且易于安装,满足实验要求。
压力测量显示控制仪:该设备用于监测促动器负载信息,实现本地的精确记录显示,并将信息发送到工控机实现数据同步。固选用型号为NS-YB05C型的测量显示控制仪,与压力传感器直接配套,协议一致,使用极为方便。
2.3 实际电路接线
对于监测系统二次侧接线较为简单,系统各元件均使用24 V开关电源供电,采集输出信号经250Ω精密电阻转换为电压信号后输入RSM3802多通道数模转换芯片,并通过标准RS485协议与工控机进行通信[8]。模拟信号输入端口分配如表1。一次侧接线如图5。图中,功率变送器以及电流变送器的电流信号Ia、Ic、I均为感应式穿心输入,由图可见,三相与两相接线不同之处主要在于功率变送器的更换,在实验时非常方便。
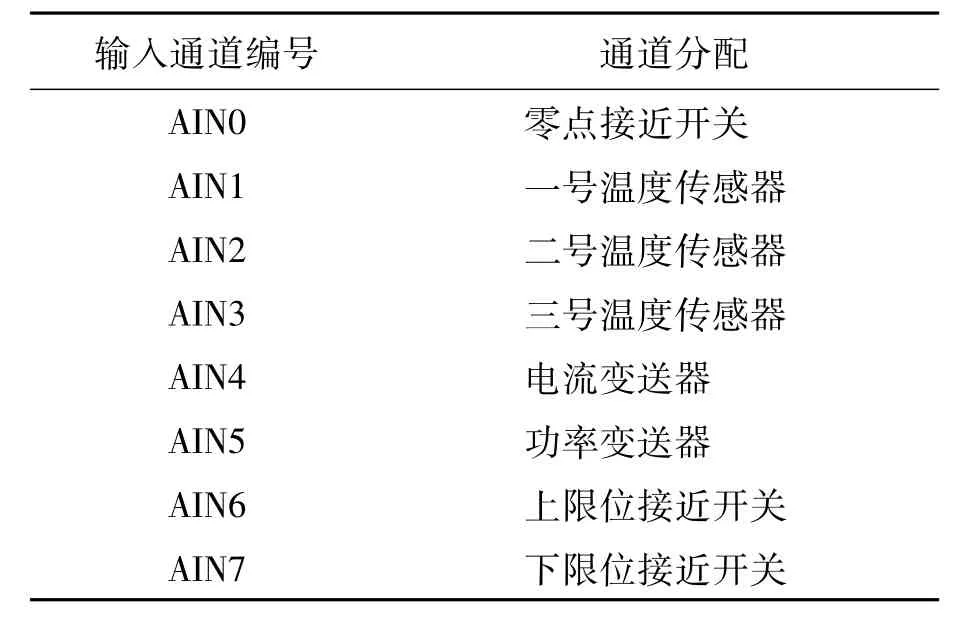
表1 模拟信号输入端口分配Table 1 The assignment of the analog-signal input ports
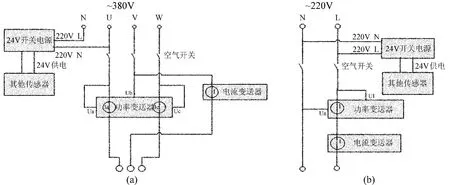
图5 监测系统一次侧接线图.(a)三相一次侧接线图;(b)两相一次侧接线图Fig.5 The primary wiring diagrams(which are side wiring diagrams)of themonitoring-management system.(a)The diagram for the three-phase wiring;(b)The diagram for two-phase wiring
2.4 通信软件
使用C语言编写了相应的监测软件,与促动器控制程序集成在一起,软件界面如图6,实现了实验数据的同步监测与记录。
在实验中,由于对数据无特殊要求,固采用定时采样的方式,每隔1 s发送查询指令,对监测系统的返回数据进行更新处理,并将获得的参数以文本的方式保存在硬盘中,以便进行历史故障分析。

图6 监测控制软件界面截图Fig.6 A screenshot of the user interface of themonitoring and control software
3 实验应用
根据需要,对不同类型的促动器进行了不同工作状态下的实验,进行了空载、变载以及适当超载情况下的测试,并在室外环境下进行了长期监测,获得了大量实验数据。其中促动器的载荷提供主要由一种促动器力学性能测试的装置[9]实现。现场实验照片可见如图7。

图7 现场实验照片.(a)变频促动器实验;(b)液压促动器实验Fig.7 Photos showing the on-site tests.(a)Test of a ferequency-conversion actuator;(b)Test of a hydraulic actuator
而对于促动器处于4 t恒载并以1.7mm/s恒速运行时监测系统所测得数据,每10 s选一组数据,连续100 s,如表2监测系统获取数据(节选),并且通过红外测温仪对温度进行标定,电参数表对电流功率进行标定,消除了零点误差,数据稳定可靠。而由于实验时促动器装置存在机械误差等原因,所以监测到的数据略有波动,符合真实实验结果。

表2 监测系统获取数据(节选)Table 2 Som e data obtained through them onitoring-m anagement system
在变载往复运行实验中所监测数据如图8,图中根据在促动器实验时监测系统长时间监测测得数据绘出了促动器的负载、速度、电流等参数的变化曲线,其中速度参数是根据编码器所测得位移与时间关系计算得来,可见监测系统客观有效地记录了促动器的运行情况。
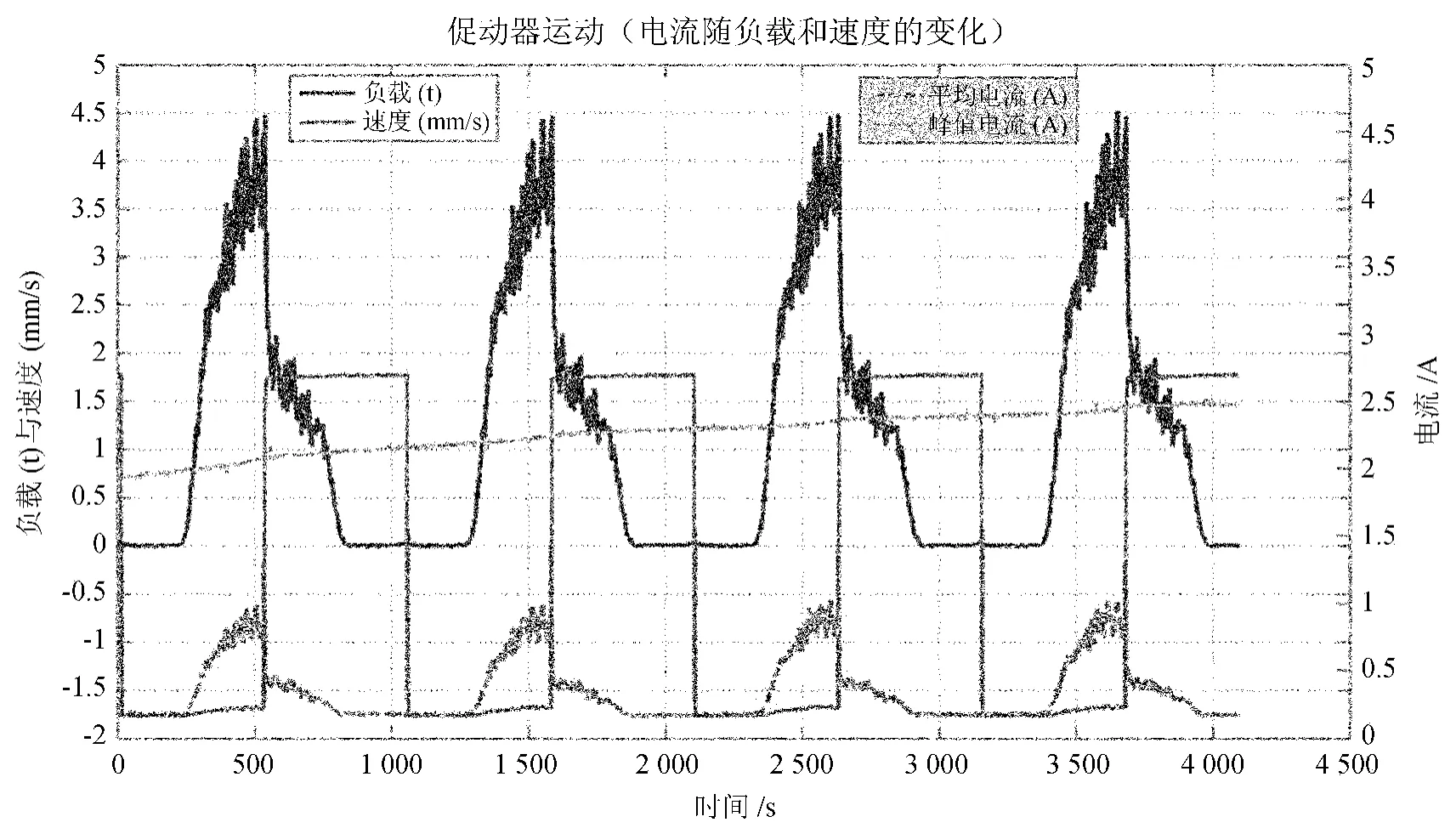
图8 电流、速度与负载变化监测数据Fig.8 Somemonitored data of current,velocity,and load
4 结论
所设计的监测系统功能完善,可实时完备地监测促动器运行中的各个状态信息,非常有利于性能评估实验,且系统模块化强,组装方便易于扩展,在应用于不同类型的促动器时易于改装。系统可实现无人值守的在线监测,大大降低了促动器实验时对人员的要求,也弥补了以往离线监测的不足之处,系统工作性能稳定,取得的数据可靠,对促动器的性能评估起到了非常关键的作用。
[1]金晓飞,范峰,钱宏亮,等.巨型射电望远镜(FAST)主动反射面结构故障诊断[J].土木工程学报,2010(6):18-25.Jin Xiaofei,Fan Feng,Qian Hongliang,et al.Fault diagnosis of cable-net structure supporting active reflector of large radio telescope-FAST[J].China Civil Engineering Journal,2010(6): 18-25.
[2]Nan Rendong.Five hundred meter aperture spherical radio telescope(FAST)[J].Science in China(Series G:Physics,Mechanics&Astronomy),2006,49(2):129-148.
[3]周荣伟,朱丽春,胡金文,等.FAST单元面板面型检测算法研究 [J].天文研究与技术——国家天文台台刊,2012,9(1):14-20.Zhou Rongwei,Zhu Lichun,Hu Jinwen.Study of a measurement algorithm for the surface of a single panel of the reflector of the FAST[J].Astronomical Research& Technology——Publications of National Astronomical Observatories of China,2012,9(1):14-20.
[4]管皓,孙才红.FAST望远镜40米模型天文观测软件的开发[J].天文研究与技术——国家天文台台刊,2011,8(4):323-328.Guan Hao,Sun Caihong.Development of a software for the astronomical observation of the 40m model of the FAST[J].Astronomical Research& Technology——Publications of National Astronomical Observatories of China,2011,8(4):323-328.
[5]徐文灿.电动缸与气缸[J].液压气动与密封,2006(2):19-24.Xu Wencan.Electric cylinder and air cylinder[J].Hydraulics Pneumatics&Seals,2006(2): 19-24.
[6]森下正志.电气设备故障分析与对策[M].王益全,译.北京:科学出版社,2009:296-297.
[7]周毓,王启明,李建斌.FAST无线式索力传感器节点的设计制作与测试[J].天文研究与技术——国家天文台台刊,2011,8(1):21-28.Zhou Yu,Wang Qiming,Li Jianbin.Development and test of nodes of wireless cable tension sensors for the fast[J].Astronomical Research& Technology——Publications of National Astronomical Observatories of China,2011,8(1):21-28.
[8]郭秀才,杨世兴.监测监控系统原理及应用[M].北京:中国电力出版社,2010:66-68.
[9]郭永卫,王启明,南仁东.一种促动器力学性能的测试装置[P].北京:中科院国家天文台.专利号:200810116587.
Performance Tests of a M onitoring-M anagement System of Actuators for the FAST
Sun Xiao,Wang Qiming,Wu Mingchang
(National Astronomical Observatories,Chinese Academy of Sciences,Beijing 100012,China,Email:sunxiao10@mails.gucas.ac.cn)
There are high standards for the actuators of the Five-hundred-meter Aperture Spherical Telescope(FAST).In the past tests,we usually only used inconvenient human inspection for recording states of the actuators.We assess the requirements on the actuators for the FAST.For testing the actuator we have further designed a monitoring-management system that can measure the current,power,temperature,load,displacement,and limit of an actuator.The system can automatically monitor and record,avoiding the inconvenience of human inspection.We chose appropriate sensors for the system and fabricated it following the structural design.We have tested the system using certain equipments.This system has achieved online monitoring of the actuators and successfully passed tests of supervision of the actuators without human intervention.The tests have generated many data showing the reliability and effectiveness of the system.In addition,the system has dramatic improvement in accuracies and maintenance of historical-information records.Long-term tests of the system have shown its satisfactory performance.
FAST;Radio Telescope;Actuator;Online Monitoring;Sensor;System Design
P111.44
:A
:1672-7673(2013)03-0227-07
国家自然科学基金(11173035)资助.
2012-06-16;修定日期:2012-07-06
孙 晓,男,硕士.研究方向:大型射电望远镜健康监测技术.Email:sunxiao10@mails.gucas.ac.cn
CN 53-1189/P ISSN 1672-7673
猜你喜欢
航天制造技术(2020年5期)2020-11-10 08:46:38
天文学报(2020年5期)2020-09-28 02:08:34
铁道通信信号(2020年12期)2020-03-29 06:22:00
制造技术与机床(2018年11期)2018-11-23 01:08:02
电子制作(2018年12期)2018-08-01 00:47:40
无线电通信技术(2015年3期)2015-12-23 11:37:02
自动化博览(2014年12期)2014-02-28 22:34:26
自动化博览(2014年6期)2014-02-28 22:32:09
自动化博览(2014年4期)2014-02-28 22:31:15
华东理工大学学报(自然科学版)(2014年4期)2014-02-27 13:49:16
