
自动巡航汽车鲁棒控制的研究
2013-03-16 06:19李世一解淑英
电子测试 2013年20期
李世一,解淑英
(烟台汽车工程职业学院,265500)
鲁棒控制作为一种先进的控制系统起源于20世纪50年代,研究人员发现其有很大的潜力和稳定性,试图将鲁棒控制应用到空间技术、汽车制造以及社会生活的各个领域。但是受当时技术水平、经济条件,及工业环境、外部干扰、误差等缘故的影响,很难建立精准的模型,这在一定程度上影响了鲁棒控制的研究进程。近几年来,随着科学技术日新月异,这种潜力巨大的控制技术才再次走入人们的视野,并有了了突飞猛进的发展。这项技术开始应用到汽车制造等各个领域,这些进步的产生关键在于其控制系统稳定性和平衡性的逐步提高,控制系统的稳定性和平衡性是影响控制系统效果的主要因素。
1 自动巡航汽车鲁棒控制技术概述
1.1 汽车自动巡航系统概述
近几年来,计算机科学技术逐渐被应用到汽车自动巡航系统中来,极大地提高了汽车自动巡航系统的先进性以及汽车本身的舒适和安全程度。汽车自动巡航系统,简称CCS,是一种可以使汽车的发动机在有利的转速范围内工作,使司机在车辆达到要求速度之后闭合开关,不用踩油门也能保持车速,使车辆保持固定速度行驶状态的系统。它一方面可以在一定程度上减轻驾驶员的劳动量,防止因疲劳驾驶产生的意外事故,节省燃料,具有一定的经济性;另一方面开关闭合之后发动机保持匀速转动,可以减少尾气的排放,保护环境,同时可以避免不必要的油门变动,在一定程度上提高了汽车的乘坐舒适性,特别是汽车在城间高等级公路或高速公路上行驶时,这种优越性就更为显著。
汽车自动巡航系统之所以能发挥其巨大的作用,主要在于其有一个强大的控制器,就像大脑控制人体的所有行动一样,控制器控制着整个系统的合理运转和良好状态。
1.2 鲁棒控制
鲁棒性分为稳定鲁棒性和性能鲁棒性两种,是控制系统在一定的地域和时间域范围,以及一定参数的摄动下保持其工作稳定效果的特性。以闭环系统的鲁棒性作为目标设计得到的固定控制器称为鲁棒控制器。现在我们所讲的鲁棒控制是指通过一定的控制算法的研究和实验,保证控制系统在合理的范围内满足所有要求,由此所设计出来的控制器在保证参数不变的同时,也要保证系统的控制性能。
鲁棒控制方法是指控制器在一定的动态范围内,参考最差的情况,设计出质量最优的模型,INA方法、鲁棒PID控制以及鲁棒极点配置等都是其常用的设计方法。这种控制方法一般适用于对稳定性要求较高的领域,如飞机和空间飞行器等的控制。在过程控制应用中,也有一些控制系统适用于鲁棒控制的设计方法,尤其是那些变化范围较大,稳定裕度小的被控对象。
2 自动巡航汽车的鲁棒控制研究创新
2.1 基于进化算法的鲁棒控制系统设计
自从1991年以来,就已经有科学家利用当时先进的进化算法对鲁棒控制系统的稳定性进行分析,随之而后,一大批的科学家也把研究方向转到进化算法在鲁棒控制系统中的应用。它具有自组织、自适应和自学习的特性。因为在这种算法中,算法可以自身利用进化过程获得的信息进行检索,大大提高了工作效率,它应用适者生存的原则操作一群问题的潜在解逐次产生最优解的更优近似。
进化算法用于控制系统的鲁棒性分析与设计一般可以概括为两类,即直接设计法和间接设计法。在直接算法中,进化算法EA可以被用来优化搜索引擎,为一个特定的被控对象选择一个最优的参数,以满足鲁棒性能的指标要求。而间接算法是在传统的鲁棒设计方法如特征结构配置、定量反馈理论等基础上引入进化算法提供的最优化参数,是传统设计方法和先进的进化算法的糅合、升级。和传统的鲁棒控制系统设计方法相比,这种设计方法以其简便、易行,可操作性强,经济高效等特点受到了极大的欢迎,能够减少设计者的工作量,提高设计效率和设计的自动化程度。
2.2 H∞次优控制系统设计
传统H∞输出反馈控制设计的控制器阶次要远高于被控对象的阶次,因而在实际工程应用中,高阶系统的H∞的优化控制器不易实现,因而需要进行降阶设计。
H∞次优控制器是为了缩短控制理论和实际工程应用的差距而缩小外部干扰、保证控制系统确定性的设计方法。我们也可以将进化算法和这种控制方法相结合,其过程是:首先应用Routh-Hurwitz准则得到控制器每一个参数的稳定区域以保证闭环系统的稳定性;其次在先前得到的控制器参数空间中确定子集,以保证在其中选取的控制器参数满足鲁棒稳定性约束条件;最后在上述子空间中寻找控制器参数,使得系统的H∞跟踪性能最好,基于H∞次优控制系统设计的三自由度四转向模型后视图如图1所示:
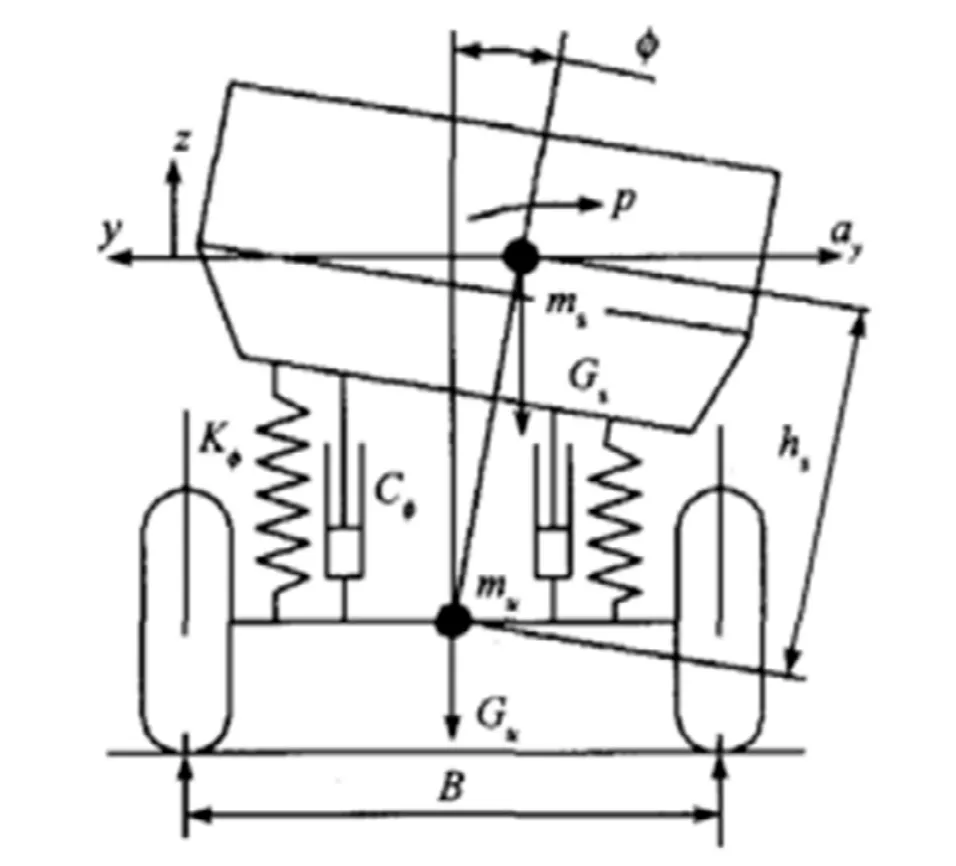
图1 基于H∞次优控制系统设计的三自由度四转向模型后视图
2.3 双闭环自动巡航智能控制系统
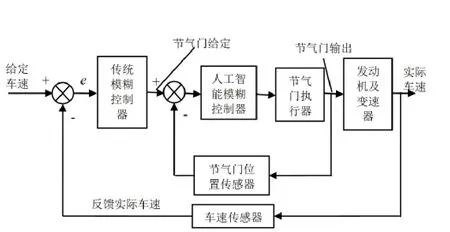
图2 双闭环自动巡航控制系统结构
控制器是控制系统的核心部件,在其中应用的控制技术将直接影响着控制系统的性能和控制器的整体效果。双闭环自动巡航系统是指在汽车机械式自动变速器的基础上利用节气门的位置变动来控制,采用人工智能模糊控制系统控制内环,传统的模糊控制系统控制外环,两者构成的双闭环自动控制整个汽车的自动巡航系统。控制系统结构如图所示:
采用节气门位置变动的方法,并将人工智能技术和以往的模糊控制系统技术相结合,能够保持系统的稳定性和精准度,且由于在实际的操作过程中不需要建立模型,能够较好的提高工作效率和工程的安全、稳定度,系统实现方式简单,鲁棒性强。
在进行鲁棒控制方法和双闭环自动巡航智能系统结合的实验之前,笔者及其相关的实验人员进行了大量的资料搜集,同时,还走访了一些资历、经验比较丰富的驾驶人员,并以他们为后期实验的对象,进行了可靠的实验。在实验之中,所采用的主要控制器包括二维常规模糊控制器(该控制器的设计采用双输入,单输出原则)和实地控制器,该控制器的主要作用是保持汽车高速运行下的稳定性能,进而获得可靠的数据和有利于顺利仿真的正确参数,在这种条件之下,再将参数代入上文中设计的三自由度四轮转向模型之中——令状态量x={实际值},输入量 u ={fr},4ws状态方程为:①mv(β+r)=Ffcosδf+Ffcosδ r,②Izr=lfFfcosδf-lrFfcosδr,并进行不同摄动状态下的鲁棒控制仿真,得出以下结果:车身侧倾角响应曲线和整个系统的摆角均在理想范围之内,并且相对比较稳定,抗外界干扰能力比较强,车身侧倾角相应变化量基本趋近于零。
3 结语
本文提出了H∞ 鲁棒控制方法与双闭环自动巡航智能控制相结合的控制方案,并针对三自由度四轮转向模型进行了控制器设计,实验结果表明:鲁棒控制方法和双闭环自动巡航智能系统的相互结合,能够保持整体系统的稳定性能,具有较好的鲁棒性。
[1] 刘志蜂,郝平.非线性系统的线性控制方法研究[J].安徽大学学报(自然科学版) ,2010,12(81).
[2] 曾立东,欧阳马静. 基于微分同胚的非线性系统解耦线性化[J]. 纯粹数学与应用数学,2009,19(82).
[3] 陈春华,李庆平. 高精度陀螺稳定平台的控制策略及误差补偿方法[J]. 辽宁科技学院学报,2008,12(12).
[4] 李青新,张小强. 二阶滑模控制在十字梁控制实验系统中的应用[J]. 北京航空航天大学学报,2009,22(12).
[5] 顾文锦,于红芸,杨智勇.变结构控制在阵列式磁集成电压调整模块中的应用研究 [J];北京航空航天大学学报,2011,13(01).
猜你喜欢
农业机械学报(2020年2期)2020-03-09
中华建设(2019年7期)2019-08-27
自动化学报(2019年6期)2019-07-23
黑龙江电力(2017年1期)2017-05-17
厦门理工学院学报(2016年1期)2016-12-01
北京航空航天大学学报(2016年7期)2016-11-16
环境科技(2016年5期)2016-11-10
系统工程与电子技术(2016年4期)2016-08-24
项目管理技术(2016年12期)2016-06-15
西南交通大学学报(2016年6期)2016-05-04
