
一种车载雷达压控振荡器线性校正方法
2013-03-12 05:24:22刘耀山孙逢圆
电波科学学报 2013年2期
姜 兴 刘耀山 孙逢圆
(桂林电子科技大学信息与通信学院,广西 桂林541004)
引 言
近些年来,毫米波雷达在汽车电子领域受到很大的关注,VCO作为频率源是雷达收发前端中的核心部件[1],系统测速测距的原理要求VCO的幅频曲线必须有很好的线性特性[2].但是因为VCO中变容二极管固有的非线性特性,导致输入和输出也是非线性的[3].这势必造成后期信号处理困难和系统测试精度降低[4].
通过实验确定了雷达传感器VCO的特性曲线,采用一种基于电压分段VCO数字线性校正的方法来修正VCO的非线性.通过校正后的雷达传感器可以大大改善后期数据处理和测试精度,具有很高的商业化、产业化价值.
1 雷达传感器内部VCO介绍
雷达射频前端系统使用了从德国进口的雷达传感器,该传感器高度集成了收发天线、混频、移相和中频预放大电路等.
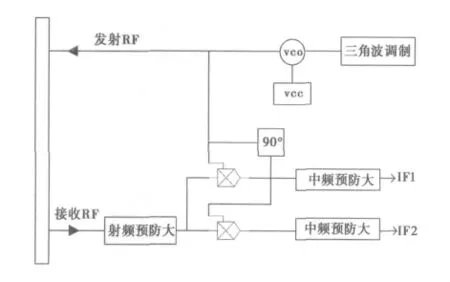
图1 雷达传感器原理
该雷达传感器的关键部件是内部集成的VCO,该VCO是通过输入外部调制电压来改变变容二极管的容值,从而达到改变谐振频率的目的.因为VCO中变容二极管固有的非线性特性,所以存在着VCO幅频特性非线性的问题[5].
2 基于电压分段的VCO数字线性校正方法
2.1 VCO决定了系统的测量精度和准确度
雷达传感器工作时,由于VCO的非线性,输入的原始电压u与输出频率f并不成线性关系,也就是说VCO调频的斜率(电调率)k是一个变化的量[6].当目标和雷达的距离R一定的时候,因为k是变量,雷达混频后输出的中频信号频率fI与R不成线性关系.这不仅会在后期的信号处理中出现虚假目标,同时随着距离的增大数据的误差会越来越大,严重影响系统测量的精度和准确度[7].
2.2 未校正前VCO的非线性度
在室温25℃暗室中,通过SS1792直流稳压电源逐点改变输入传感器VCO中的电压,天线接收VCO的发射信号送到罗德斯瓦茨高性能频谱分析仪中得出频率值.幅频特性图如图2所示.
图2表明,在不同的电压区间k是不同的.
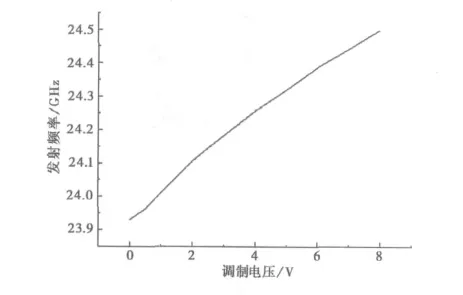
图2 雷达传感器VCO幅频特性曲线
运用最小二乘法求出非线性度.首先约定小写的x和y表示各点坐标,而大写字母表示平均值.例如X表示横坐标的平均值、Y2表示纵坐标平方的平均值、(Y)2表示纵坐标平均值的平方、XY表示横纵坐标乘积的平均值.
非线性度表示成δ,计算公式为

δ的值在0和1之间.δ越接近于1,数据的线性越好.
代入数据计算得到未经校正前δ=0.901.
2.3 基于电压分段的VCO数字线性校正方法
2.3.1 校正方案的选择
常用的VCO外部校正主要有两种方法:1)闭环线性校正;2)开环线性校正[8].
闭环线性校是通过负反馈进行校正.因为可以对VCO的输出自动跟踪补偿,所以闭环线性校正效果好,可靠性也高.其缺点是实现起来电路复杂,需要器件多,成本也高,这是不符合车载雷达系统的小型化和低成本要求的.开环线性校正虽然精度比不上闭环,也容易受外界因素(比如温度)的影响,但是开环线性校正电路结构简单,成本相对低.这里选用开环线性校正方案.
开环线性校正分为模拟校正和数字式校正.模拟校正又分为模拟断点式校正和模拟乘法器式校正[9].模拟断点式校正只适用于特性曲线的一阶导数的绝对值单调下降的情况,模拟乘法器式校正没有这个限制,但是校正的精度取决于电路中乘法器的数目,增加了电路的复杂性[10].数字式校正是通过提取出特性曲线的原型函数,然后演算得到相应的补偿函数,运用数字信号处理技术(Digital Signal Processing,DSP)或者现场可编程门阵列技术(Field Programmable Gate Array,FPGA)结合模数变换器(Analog to Digital Converter,ADC)产生相应的补偿输入电压对VCO输出信号进行校正.这样的方法电路通用性强,可移植性高,但是提取出原型函数很困难[11].
综合模拟断点式校正和数字式校正两种方法的优缺点,采用一种电压分段VCO数字线性校正的方法.这种方法采用断点分段的方法把特性曲线分成几个原型函数容易提取的电压段,同时在各个电压段的曲线校正上采用数字式的方法来校正,避开了两种方法的缺点,整合了它们的优点.
2.3.2 电压分段VCO数字线性校正方法的依据
经过对图2中VCO幅频特性曲线数据的处理,得到了校正后的理想目标曲线,如图3虚线所示.实线是未校正前的VCO幅频特性曲线.

图3 校正后理想目标曲线
图3的实线表明,在u为0.5~2V、2~4V、4~6 V、6~8V曲线基本成线性的,也就是在这些电压值之间k可以看作是个常数,分别把各个电压段的电调率设为k1、k2、k3、k4,且都已知.因此可以通过电压分段的方法来分别求出线性校正电压u校正与u的关系,在下面的讨论中,f的单位是GHz,u的单位是V.
2.3.3 u=0.5~2 V 时u校正与u的关系
虚线是校正目标,设为f目标=k0×u+C0,其就是实线上当u=0.5和u=8时两点之间的线段,求得k0=0.070 625,C0=23.931,所以

原始的实际曲线设为f=k1×u+C1,校正后的曲线则为f校正=k1×u校正+C1,通过原始实际曲线已知数据求得k1=0.094,代入点已测试点(u,f)=(0.5,23.964),求得C1=23.917,所以

输入u校正后,f校正=f目标,因此

移项计算

代入已知数据计算得到

2.3.4 u=2~4V时u校正与u的关系
再求u=2~4V段的u校正与u的关系.
根据u=0.5~2V段的方法,设校正后的曲线为
f校正=k2×u校正+C2,k2=0.075 5,代入点(2,24.105),得到C2=23.954.所以

根据公式(4)可得

代入数据计算得到

2.3.5 u=4~6V时u校正与u的关系
运用求u=0.5~2V段的方法,求出在u=4~6 V段的u校正与u的关系,得到

其中:C3=23.998;k3=0.064 5.

2.3.6 u=6~8V时u校正与u的关系
运用求u=0.5~2V段同样的方法,求出u=6~8V段的u校正与u的关系,得到

其中:C4=24.052;k4=0.055 5,所以

3 校正后与校正前效果对比
在室温25℃暗室中,运用同样的设备和方法根据式(6)、(9)、(11)、(13)计算出校正后的电压值,依次输入到雷达传感器中,通过接收天线接收VCO发射出来的信号送到频谱仪中记录下来.得出VCO的幅频特性曲线如图4所示.
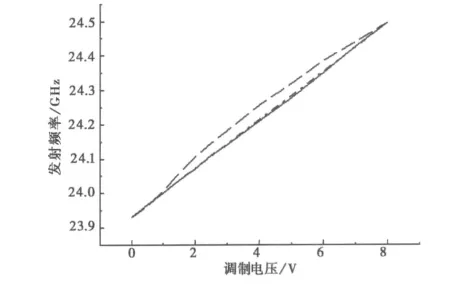
图4 校正后与校正前幅频特性曲线比较
图4中,实线是经过校正后的VCO幅频特性曲线,虚线是校正前的VCO幅频特性曲线,点线是理想校正目标曲线.图4表明,经过电压分段VCO线性校正后,VCO的幅频特性曲线与预定的线性目标已经非常接近.具体的非线性度通过公式(1)计算得到:δ=0.989.δ比校正前0.901高了0.088.
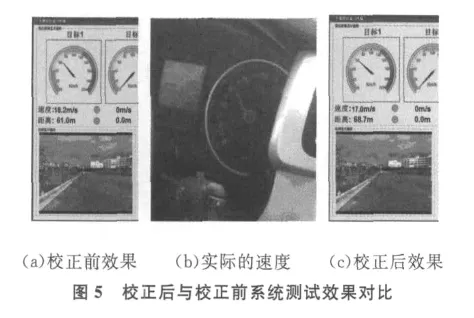
校正后与校正前系统测试效果对比如下.
系统实地测试中,汽车均以60km/h(16.7m/s)通过距离为70m的测试点.图5(a)表明,在VCO校正前系统显示距离61.0m,速度18.2m/s,距离误差9m,速度误差1.5m/s;图5(c)表明,在 VCO校正后系统显示距离68.7m,速度17.0m/s,距离误差1.3 m,速度误差0.3m/s.可以看出VCO校正后,系统测量距离和速度误差分别缩小了11%、7.2%.
4 温度对校正后VCO的影响
调节暗室内的温度,其他条件保持不变.依次使暗室的温度为20℃、25℃、30℃,等待室内的温度稳定后测试,得到校正后幅频特性曲线如图6所示.
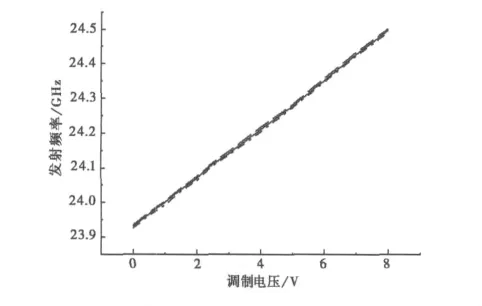
图6 不同温度下VCO校正后幅频特性曲线比较
图6表明,在不同的温度下,校正后的VCO的幅频特性曲线形状并没有改变,而是曲线整体随着温度升高而在纵轴平移,说明温度对幅频特性曲线的非线性度影响很小.
5 结 论
采用了一种电压分段VCO数字线性校正的方法,有效地改善了雷达传感器VCO的线性度,减小了目标距离增大后雷达系统测速测距出现的误差,提高了后期信号处理的精确度和分辨率,并且通过实验证明了温度不影响VCO整体幅频特性曲线线性度,具有很高的市场应用前景.
[1]綦 超,姜 兴.11.8GHz低相噪频率源的设计[J].桂林电子科技大学学报,2012,32(3):189-192.QI CHAO,JIANG Xing.Design of 11.8GHz low phase noise frequency synthesizer[J].Journal of Guilin University of Electronic Technology,2012,32(3):189-192.(in Chinese)
[2]朱 巍.24GHz多普勒车载雷达射频前端关键技术研究[D].南京:东南大学,2010.ZHU Wei.Investigations on the Key Thchnologies for 24GHz Doppler Vehicle Mounted Radar RF Front-end[D].Nanjing:Southeast University,2010.
[3]吴 端,蒋慧平.Ka波段线性VCO的分析和研制[J].电波科学学报,1991(Z1):361-364.WU Rui,JIANG Huiping.Ka band linear VCO analysis and research[J].Chinese Journal of Radio Science,1991(Z1):361-364.(in Chinese)
[4]沈 涛,孙忠良.毫米波VCO电调特性的线性校正方案研究[J].现代雷达,1997(1):92-101.SHEN Tao,SUN Zhongliang.Investigation of inearization schemes for millimeter wave VCO tuning characteristics[J].Modern Radar,1997(1):92-101.(in Chinese)
[5]LIU Liangbing,TU Yaqing,XU Baosong.A division ratio-variable delay method for VCO FM nonlinearity correction[J].Intelligent Control and Automation,IEEE,2008:2692-2695.(in Chinese)
[6]VENKATRAM H,INTI R,UN-KU M.Least mean square calibration method for VCO non-linearity[C]∥International Conference on Microelect ronics,December 19-22,2010:1-4.
[7]李 峰,郭德淳.使用VCO实现变容二极管直接调频[J].今日电子,2005,(3):63-64.LI Feng,GUO Dechun.Direct Frequency Modulation Based on Varactor[J].Electronic Products,2005(3):63-64.(in Chinese)
[8]陈祝明,丁义元,向敬成.宽带LFMCW扫频源的相对非线性校正方法[J].系统工程与电子技术,2001,23(2):16-18.CHEN Zhuming,DING Yiyuan,XIANG Jingcheng.A method on nonlinear correction of broadband LFMCW signal utilizing its relative sweep nonlinear error[J].Journal of Systems Engineering and Electronics,2001,23(2):16-18.(in Chinese)
[9]冷建伟,齐晓辉.VCO电调特性的线性校正技术综述[J].微电子学,2012,42(3):440-444.LENG Jianwei,QI Xiaohui.An overview of linearity correction technology for tuning characteristics of VCO[J].Microelectronics,2012,42(3):440-444.(in Chinese)
[10]BLASER R J.Analog multipliers drive component linearization scheme[J].Microwave&RF,1992,31(1):74-80.
[11]YAN G W,XIE G,QIU Y X,ETAl M.A based nonlinearity correction algorithm for the VCO of FMCW radar level gauge[J].Proc SPIE Int Soc Opt Eng,2006:460-470.
猜你喜欢
太阳能学报(2023年2期)2023-04-12 00:00:00
数学物理学报(2021年4期)2021-08-30 08:28:02
国学(2020年1期)2020-06-29 15:15:30
小学生学习指导(低年级)(2018年11期)2018-12-03 05:05:00
数学物理学报(2017年6期)2018-01-22 02:26:53
摄影之友(影像视觉)(2017年1期)2017-07-18 11:12:16
太空探索(2016年9期)2016-07-12 10:00:04
现代电子技术(2015年11期)2015-07-28 12:50:58
河南科技(2015年11期)2015-03-11 16:25:02
振动、测试与诊断(2014年5期)2014-03-01 01:14:36
