
低轨道轻质星载一体化空间光学遥感器的热设计
2013-03-11 09:26吴清文李志来杨献伟于善猛
中国光学 2013年2期
江 帆,吴清文,刘 巨,李志来,杨献伟,于善猛
(中国科学院长春光学精密机械与物理研究所,吉林长春130033)
1 引言
空间光学遥感器作为对地观察的重要工具,广泛地应用于气象预告、地球资源探测、军事侦察等领域。为节省资源,空间光学遥感器与卫星平台的安装方式逐渐趋于星载一体化,遥感器不仅直接裸露于外太空,且在遥感器结构上还搭载部分星用设备。星载一体化设计使得遥感器受外热流影响增大、温度边界更加复杂。
空间光学遥感器根据空间分辨率增高的发展需求,逐渐由同轴透射系统变为离轴反射系统[1],卫星轨道也向低地球轨道转移。离轴反射系统给光学元件的热控增加了结构限制,大尺寸光学元件的温度水平和温差要求更加苛刻,低轨空间环境对遥感器表面的热控涂层提出了更高的要求[2-3]。
综合考虑经济效益和效率,研究人员研究了一种低轨道轻型离轴三反空间光学遥感器,该类遥感器能量需求低、质量小、发射周期短、空间分辨率足够高,与卫星平台一体化设计,使飞行器达到轻质敏捷的要求,能够快速及时地对地侦测。遥感器入轨后处于太阳帆板对日定向姿态,需要对地探测时转换为对地定向姿态,拍摄结束后立即回复为对日定向姿态。光学遥感器的热设计目标是在卫星提供较小热控功耗的前提下保证遥感器在对日定向时就满足光学指标要求,而且在姿态转换后依旧满足光学指标要求。本文针对这种敏捷型光学遥感器开展了热设计研究[4-6],控制其在轨温度水平及分布,从而保障遥感器随时具备工作能力。
2 遥感器简介
2.1 遥感器结构
遥感器采用离轴三反光学系统,光学元件包括主镜、次镜、三镜、调焦镜,均使用碳化硅材料。
图1为光学遥感器的结构示意图。遥感器结构包含后框、前框、碳纤维杆和碳纤维蒙皮,其中后框和前框为铸钛合金。主镜、三镜和焦面盒安装于后框上,次镜和调焦镜安装于前框上,前框通过碳纤维杆与后框连接。遥感器焦面盒内包含4片CCD。

图1 遥感器及安装其上的部分星用设备示意图Fig.1 Sketch diagram of remote sensor and some satellite equipment
遥感器包络尺寸为800 mm×550 mm×960 mm,入光口尺寸为375 mm×310 mm。遥感器焦距为2 m,相对孔径为1/9。遥感器总质量为99 kg。
遥感器后框通过3个长280 mm的碳纤维支架沿-Z向安装于卫星平台上。遥感器上还搭载了太阳帆板、GPS天线、太阳敏感器、星敏感器等星用设备。
2.2 遥感器轨道及设计约束
卫星飞行轨道为太阳同步轨道,轨道高度为260 km,轨道倾角为 95.5°,降交点地方时为10∶00AM。遥感器在轨不工作时太阳帆板对日定向,工作时入光口对地定向,每轨工作时间不超过10 min。焦面组件总功耗约为14 W。
主动热控峰值功耗为50 W,热控指标为遥感器本体温度(18±4)℃,光学元件温度(18±2)℃,且4个反射镜任意两者之间温差不超过2℃,CCD温度≤30℃。
3 遥感器热设计
3.1 任务分析和外热流计算
将遥感器的姿态分为对日定向和对地定向,遥感器绝大部分时间处于对日定向即卫星充电姿态。比较两种姿态可知,遥感器各表面在对日定向姿态下的吸收外热流均小于对地定向姿态下的吸收外热流。遥感器由对日定向转换为对地定向的时间不超过10 min,为保证卫星变换姿态后遥感器能立刻进行工作,必须在对日定向时就使遥感器的温度水平和温差要求满足指标要求。因此,遥感器热控的首要任务确定为在对日定向下保证遥感器的热控指标。
热分析的工况设定为对日低温工况、对日高温工况和对日高温转对地后瞬态工况。工况中低温工况和高温工况的区别主要取决于太阳常数、β角和太阳帆板的光电转换效率。
由于260 km轨道处原子氧密度很大,遥感器多层隔热材料面膜选用防原子氧布,面膜的吸收发射比取αS/ε=0.36/0.85。
由于太阳帆板安装在遥感器的+X面且轮廓尺寸大于遥感器+X面尺寸,遥感器-Z面通过安装支架安装于卫星平台上且卫星平台轮廓尺寸大于遥感器-Z面尺寸,因此遥感器+X面和-Z面受外热流影响很小。
使用Thermal Desktop 4.8软件计算外热流,得到遥感器各表面轨道周期平均吸收外热流密度如表1所示。

表1 各表面不同工况下的轨道周期平均吸收外热流(W/m2)Tab.1 Average absorbed heat flux on each surface in different cases(W/m2)
根据表1可知,若遥感器在对日定向姿态下能满足热控指标,转为对地定向姿态后遥感器温度水平不可能低于对日定向姿态下的温度水平,此时只要主动热控闭环控温就可以实现温度自动调整。
3.2 热接口设计
遥感器热设计采用主动热控与被动热控相结合的方式,主要包括热接口设计、被动热控和主动热控3个方面。
遥感器通过3个碳纤维支架安装于卫星平台上,支架与遥感器间采用10 mm厚聚酰亚胺隔热垫进行隔热。卫星平台提供给遥感器安装面的温度边界为18~30℃。
太阳帆板通过4个安装支架安装于相机+X面,-Z侧两个安装支架安装于后框上,+Z侧两安装支架安装于蒙皮上。采用柔性支架安装使其热阻足够大并使用两层各厚5 mm聚酰亚胺隔热垫。对日定向姿态下太阳帆板温度较高,温度波动为-40~+110℃,稳态平衡温度约为70℃,在遥感器蒙皮+X侧包覆20单元多层隔热材料,面膜使用双面镀铝聚酯薄膜,分析计算时面膜吸收发射比取αS/ε=0.1/0.1。
GPS天线和太阳敏感器均采用两层各厚5 mm的聚酰亚胺隔热垫并采用凸台安装,安装面处均包覆10单元多层隔热材料隔离与遥感器后框间的辐射。
星敏感器通过星敏支架安装于后框±Y侧中部,星敏支架与后框间使用8 mm厚聚酰亚胺隔热垫并采用凸台安装,安装面包覆10单元多层隔热材料隔离与遥感器后框间的辐射。
由于遥感器每轨工作时间不超过10 min,焦面组件总功耗不超过14 W,焦面盒自身热容较大,故不设置散热面,通过改善机械结构、灌封电路板、涂抹导热脂等措施来减小CCD经焦面盒到相机主体结构的传导热阻。
3.3 被动热控
遥感器结构件内表面均黑色阳极氧化处理,红外发射率ε≥0.85。碳纤维杆和碳纤维蒙皮内部喷ERB-2B黑漆,红外发射率ε≥0.85。
遥感器外表面均包覆20单元多层隔热组件,每单元多层隔热组件由一层双面镀铝薄膜(6 μm反射屏)和一层涤纶网组成,多层隔热材料面膜除+X面使用双面镀铝聚酯薄膜外均使用防原子氧布。遥感器前框架-X面和后框上对应星上设备安装处也包覆10单元多层隔热材料,面膜使用双面镀铝聚酯薄膜。
3.4 主动热控
遥感器主动热控通过对碳纤维蒙皮加热来保证遥感器整体温度水平,该部分主动加热功耗占整体功耗的大部分。
由于各反射镜均进行了轻量化处理且支撑结构较复杂,无法进行直接热控。因此,对主镜和三镜额外加工了后罩并在后罩上实施加热区;对于次镜和调焦镜则在对应位置的蒙皮上设置加热区。通过对光学元件后罩或对应蒙皮的加热来保证光学元件的温度水平和温差。
为减小星上设备对遥感器影响,在后框上星敏支架和GPS天线安装面处设置了加热区;受太阳帆板影响,后框+X段温度高于-X段温度,为保证温差要求,在后框-X段设置加热区。
前框架靠近入光口部分受外热流影响较大且热容小,因此也设置了加热区。
遥感器主动热控共设置11个加热区,每个加热区设置2个热敏电阻形成闭环控制。
3.5 仿真分析
规划3个工况进行仿真分析,分别为对日低温工况、对日高温工况和对日高温转对地瞬态工况。仿真分析软件使用Thermal Desktop。
对日低温工况:对日定向,太阳常数取1 322 W/m2,β 角 为 10.3°,地 球 红 外 取221 W/m2,地球反照率取0.3,外热流取轨道周期平均;相机不工作,相机安装点温度为18℃。
按对日低温工况给定参数计算所得部件温度如图2所示,光学元件温度均在(18±2)℃。后框温度在(18±4)℃,太阳帆板安装点温度最高,星敏感器和GPS天线安装点温度最低。前框温度均在(18±2)℃。
对日高温工况:太阳常数取1 412 W/m2,β角为19.9°,地球红外取236 W/m2,地球反照率取0.3,外热流取轨道周期平均;相机不工作,相机安装点温度为30℃。

图2 对日低温工况部件温度(℃)Fig.2 Temperatures of components in sun oriented cold case(℃)
对日高温稳态分析结果如图3所示,各项温度指标均能满足任务要求。相对低温工况,光学元件中三镜和调焦镜温度偏高,同样由于受太阳帆板高温影响,后框+X侧温度最高接近21℃,形成局部高温。
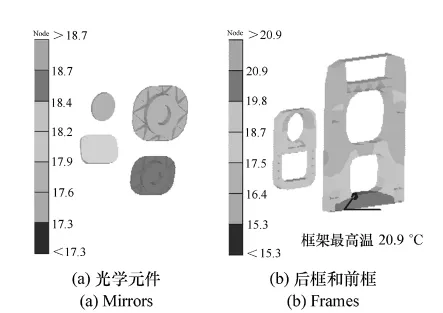
图3 对日高温工况部件温度(℃)Fig.3 Temperatures of components in sun oriented hot case(℃)
对日高温转对地瞬态工况:太阳常数取1 412 W/m2,β 角 为 19.9°,地 球 红 外 取236 W/m2,地球反照率取0.3,相机工作10 min,相机安装点温度为30℃。该工况为对日高温工况下遥感器温度平衡后转换为对地定向姿态,持续时间1 h。姿态转换时间不超过10 min,因此未考虑姿态转换过程中外热流的变化。
对日高温转对地瞬态工况持续1 h,在第0 min遥感器开始工作,第10 min停止工作。工况初始温度取上一工况平衡数据,轨道计算以出阴影区点作为起点。
由于主动加热功耗按对日模式计算,外热流增加引起在该工况中光学元件温度普遍升高,如图4所示。次镜变化最为明显,温度升高最大约1.5℃,其次为调焦镜,主镜和三镜变化较小。分析次镜温度变化的原因有两点,即受外热流影响较大和热容较小。
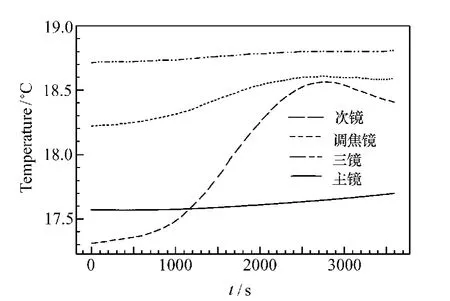
图4 对地瞬态工况光学元件温度Fig.4 Temperatures of optical components in earth orientation transient case
遥感器CCD组件从第0 min开始工作,总工作时间为10 min。CCD焦面和焦面盒的温度变化如图5所示,其中焦面盒温度为CCD压板安装处温度即焦面盒温度最高点。由图5可知,遥感器工作10 min后CCD焦面温度低于30℃,满足任务要求。

图5 对地瞬态工况CCD组件温度Fig.5 Temperatures of CCD components in earth oriented transient case
实际在轨中,卫星由于能量有限,处于对地定向的时间累积不会超过30 min,即遥感器探测结束后立即转换回太阳帆板对日状态进行充电,因此实际在轨状态下各光学元件的升温趋势和CCD工作后的降温趋势会比仿真分析结果更加友好,同时主动加热的等效功耗会因温度偏高而降低,从而保证相机各部位的温度在小范围内波动。遥感器主动热控通过对碳纤维蒙皮的加热保证遥感器整体温度水平,该部分主动加热功耗占整体功耗的大部分。
4 热试验
为验证热设计的有效性和正确性,对遥感器进行了两次热平衡试验[7-9]:相机分系统热平衡试验和整星热平衡试验。相机分系统热平衡试验在ZM4300空间模拟器中进行,整星热平衡试验在KM3B空间模拟器内进行。空间模拟器内压力≤1.3×10-3Pa,热沉温度为(100±5)K。
相机分系统进行热平衡试验时进罐前状态如图6所示。卫星平台、太阳帆板、太阳敏感器、GPS天线、星敏感器均使用模拟件,其中卫星平台安装支架、太阳帆板、太阳敏感器使用闭环控温提供温度边界,GPS天线和星敏感器使用加热区模拟在轨工作。

图6 遥感器热平衡试验Fig.6 Thermal balance test of the remote sensor
整星热平衡试验时,卫星平台提供真实接口。安装在相机上的星上组件如太阳敏感器、星敏感器、太阳帆板、GPS天线等均采用真实件。
两次热平衡试验中遥感器外热流均使用红外加热笼模拟[10],并使用黑片进行热流密度测量。
相机分系统试验时,遥感器焦面组件采用加热片进行模拟。整星试验时,焦面组件为真实件。
试验规划3个工况,同仿真分析定义。统计3个工况下的试验数据如表2所示,其中对日高温转对地瞬态工况的数据中光学元件的温度为工况持续1 h后的数据,CCD温度为结束工作时的数据。

表2 遥感器部件在不同工况下的温度Table 2 Temperatures of components in different cases (℃)
相机分系统试验时,对日低温工况和对日高温工况下,遥感器主动热控功耗分别为40.4和37.2 W。
整星试验时,对日低温工况和对日高温工况下,遥感器主动热控功耗分别为37.3和30.4 W。
比对相机分系统试验数据和整星试验数据,相机光学元件温度一致性较好。整星试验相对相机试验,卫星提供的接口更真实且益于相机热控。
5 结论
根据空间光学遥感器的轨道特点和星载一体化设计,对遥感器进行了热设计,有效地隔离了星上设备对遥感器的影响,合理分配了主动加热的功耗和区域。
根据遥感器的轨道姿态和工作模式,设定了3个工况,依据工况参数对遥感器进行了仿真分析和热平衡试验,验证了遥感器热设计的有效性。遥感器结构温度为(18±4)℃,光学元件温度为(18±2)℃,CCD温度≤30℃。
本文所述双姿态轻质敏捷型星载一体化空间光学遥感器,调姿时间和对地探测时间足够短,工作频率低,图像数据量小,热设计时不用考虑对地定向工况,不必设置CCD焦面散热面。本文解决了在非摄像模式下保证其摄像能力,但热控功耗相对较小的矛盾,有关热控措施适用于低轨轻质星载一体化卫星的光学遥感器。
[1] 韩昌元.高分辨率空间相机的光学系统研究[J].光学 精密工程,2008,16(11):2164-2172.HAN CH Y.Study on optical system of high resolution space camera[J].Opt.Precision Eng.,2008,16(11):2164-2172.(in Chinese)
[2] 杨献伟,吴清文,李书胜,等.低轨道低能量空间光学遥感器热设计[J].光学技术,2011,37(1):91-96.YANG X W,WU Q W,LI SH SH,et al..Thermal design of a low-energy space optical remote sensor in LEO[J].Optical Technique,2011,37(1):91-96.(in Chinese)
[3] 闵桂荣,郭舜.航天器热控制[M].二版.北京:科学出版社,1998.MIN G R,GUO SH.Spacecraft Thermal Control[M].2nd ed.Beijing:Science Press,1998.(in Chinese)
[4] 吴清文,卢泽生,卢锷.空间光学遥感器热分析[J].光学 精密工程,2002,10(2):205-208.WU Q W,LU Z SH,LU E.Thermal analysis for a space optical remote sensor[J].Opt.Precision Eng.,2002,10(2):205-208.(in Chinese)
[5] 陈立恒,吴清文,卢锷,等.空间摄像机热设计[J].光学技术,2008,37(10):2039-2042.CHENG L H,WU Q W,LU E.Thermal design of space camera[J].Optical Technique,2008,37(10):2039-2042.(in Chinese)
[6] 吴雪峰,丁亚林,吴清文.临近空间光学遥感器热设计[J].光学 精密工程,2010,18(5):1159-1164.WU X F,DING Y L,WU Q W.Thermal design for near space optical remote sensor[J].Opt.Precision Eng.,2010,18(5):1159-1164.(in Chinese)
[7] 于善猛,刘巨,杨劲松,等.离轴式空间光学遥感器的热设计及仿真研究[J].红外与激光工程,2011,40(8):1521-1525.YU S M,LIU J,YANG J S,et al..Thermal design and simulation for off-axis space optical remote sensor[J].Infrared and Laser Eng.,2011,40(8):1521-1525.(in Chinese)
[8] 贾学志,王栋,张雷,等.轻型空间相机调焦机构的优化设计与精度试验[J].光学 精密工程,2011,19(8):1824-1831.JIA X ZH,WANG D,ZHANG L,et al..Optimizing design and precision experiment of focusing mechanism in lightweight space camera[J].Opt.Precision Eng.,2011,19(8):1824-1831.(in Chinese)
[9] 杨献伟,吴清文,李书胜,等.空间光学遥感器设计[J].中国光学,2011,4(2):139-146.YANG X W,WU Q W,LI S S,et al..Thermal design of space optical remote sensor[J].Chinese Optics,2011,4(2):139-146.(in Chinese)
[10] 贾阳,杨晓宁.飞船红外加热笼热设计方法研究[J].航天器工程,2004,13(2):52-56.JIA Y,YANG X N.A study of spacecraft infrared heating cage for[J].Spacecraft Eng.,2004,13(2):52-56.(in Chinese)
猜你喜欢
北京航空航天大学学报(2022年7期)2022-08-06
制造技术与机床(2017年5期)2018-01-19
制造技术与机床(2017年5期)2018-01-19
中国塑料(2017年2期)2017-05-17
个人电脑(2016年12期)2017-02-13
电子制作(2016年19期)2016-08-24
中国塑料(2015年9期)2015-10-14
空间控制技术与应用(2015年3期)2015-06-05
空间控制技术与应用(2015年4期)2015-06-05
载人航天(2013年5期)2013-09-19
