
旋转双棱镜光束指向控制技术综述
2013-03-11 09:26范大鹏鲁亚飞熊飞湍
中国光学 2013年2期
范大鹏,周 远,鲁亚飞,黑 墨,熊飞湍,李 凯
(1.国防科学技术大学机电工程与自动化学院,湖南长沙410073;2.长沙学院电子与通信工程系,湖南长沙410003;3.清华大学精密仪器与机械学系,北京100084)
1 引言
光束指向控制技术既可用于光束指向调整,又可用于改变成像视轴,在自由空间光通信、红外对抗、激光指示器、激光雷达、光纤光开关等设备中有广泛的应用[1]。这些应用中普遍使用的指向机构有万向转架[2-6]和万向转镜[7-8]两种。万向转架机构将激光器、探测器等装置安装在一个多轴万向架上,控制其回转运动可实现光束或视轴的空间转向。该类机构体积大、惯量大、动态性能差、反应时间慢,对振动敏感,不利于载体平台安装及载体姿态平衡[1,4-6]。万向转镜机构利用安装在激光器或探测器前方的扫描镜的快速摆动来实现光束或视轴指向调整[9]。该类机构通常占用空间大,光束偏转对机械误差敏感,一般只用于小口径光束的偏转[10]。
与上述传统的光束转向机构相比,基于旋转双棱镜设计的光束或视轴调整装置性能更为优异。旋转双棱镜系统通过两棱镜的共轴独立旋转改变光的传播方向,可实现光束或视轴的指向调整[5]。该系统结构紧凑,指向精度高,光损耗小,整体造价小,无时间色散效应,可控制大口径光束实现大角度偏转,机械传动误差对指向精度的影响也很小[10]。在自由空间激光通信、激光雷达、光纤光开关、激光指示器等领域中,旋转双棱镜可用于激光光束的转向及指向稳定调整。在空间观测、侦察监视、红外对抗、搜索营救、显微观察、干涉测量、机器视觉等领域中,旋转双棱镜可用于改变成像视轴,扩大搜索范围或成像视场。目前,旋转双棱镜已在光束扫描、远距离目标瞄准与跟踪等方面展现出广泛的应用前景[11-14]。
本文分析了旋转双棱镜光束指向控制系统的光束指向机制,介绍了系统及其相关技术的研究进展和应用,总结了其面临的难题和发展趋势。
2 旋转双棱镜光束指向机制

图1 旋转双棱镜光束偏转示意图Fig.1 Schematic diagram of beam steering based on rotational double prisms
旋转双棱镜光束指向控制系统由一对共轴相邻排列的折射棱镜组成,两棱镜的顶角和材料相同,能绕共同轴独立旋转,其光束偏转方式如图1所示。光束平行系统转轴入射,两棱镜Π1、Π2通过折射改变光束传播方向,然后通过改变两棱镜的转角θ1、θ2使出射光束在一定偏转角范围内实现任意指向调整[12,15-16]。旋转双棱镜光束转向机制的研究主要归纳为2个问题[17-18]:(1)由棱镜的转角θ1、θ2得出出射光束的偏转角Φ和方位角Θ(正向问题);(2)由出射光束的偏转角Φ和方位角Θ得出各棱镜的转角(反向问题)。正向问题的分析是旋转双棱镜光束指向应用的前提和基础。通过该问题的解算可以探讨旋转双棱镜光束扫描机制。反向问题是光学跟踪和目标指向应用中必须解决的关键问题,其解算可认为是正向问题的逆过程。
2.1 正向问题
最简单的正向问题解算方法为一级近轴近似矢量中心算法[19]。该算法将棱镜看作为顶角较小的光楔,其对光束的偏转角大小只取决于棱镜楔角和折射率,出射光束指向棱镜主截面厚端,与棱镜方位及入射光束方向无关。其推算过程如图2所示,光束射入系统(O点)后,从棱镜Π1出射,随着棱镜的旋转,偏转矢量δ1末端将沿以δ1的大小为半径的圆周运动。光束入射棱镜Π2后,偏转矢量δ2末端将沿以δ2的大小为半径的圆周运动。系统总偏转矢量Φ可看作δ1和δ2的矢量和。该方法通过薄透镜近似形成简化模型,描述了系统光束偏转的主要规律,避免了繁琐的光路计算,适合光束偏转与扫描规律的理解及结果预测,已被许多研究者用于探讨双光楔(Risley棱镜)系统的光束扫描[9,16,20-22]。

图2 一级近似矢量中心算法推算偏转角和方位角Fig.2 Altitude and azimuth angles calculated with firstorder approximation vector center method
Jeon用旋转矩阵描述双棱镜对光束的偏转,得到了正向问题的一级近似解算式[23]。该方法的优势表现在,通过矩阵算式的扩展可对任意数目棱镜组成的棱镜组解算正向问题。Li对正向解算式进行了级数展开,舍弃高次项得到了正向问题的三级近似解,其解算精度得到大幅提升[24]。以上正向问题解算方法对光束的偏转作了一级近轴近似或三级近似,可用来分析双棱镜的小角度光束指向。大角度光束偏转正向问题的准确解可利用商业光学设计软件(如Zemax)分析获得,但其应用迭代的方法得出数值解,无法得出光束指向的解析解[25]。采用非近轴矢量光线追迹方法可推算正向问题的准确解析解[26-27]。即基于矢量折射理论,应用矢量形式的斯涅尔定律,沿着系统中光线的传输光路依次追迹得出准确解。
2.2 反向问题
在目标指向与跟踪应用中,需要根据目标空间指向位置逆向确定棱镜的转角,其解算需以正向问题的分析为基础。理论上该反向问题可以依据正向解算过程重复逆向推算得以解决,但在实际推算中,棱镜界面上的矢量折射逆运算存在较大困难[28]。Boisset等人基于一级近轴近似理论提出了一种迭代方法解算反向问题,即采用闭环控制,根据测量信息寻找棱镜方位[19]。该方法依赖探测器测量数据,在许多实际应用中难以实现。Degnan利用近轴光线矩阵分析了双棱镜系统中的光线传输,提出了一种无需迭代算法的反向问题解算方法[29],该方法基于一级近似,用于大角度光束偏转的反向解算仍存在较大偏差。
Yang于2008年首次给出了反向问题的准确解析解[18]。即利用非近轴矢量光线追迹方法由棱镜的转角推算出射光束指向的准确解析表达式。将其对棱镜转角求导,构造Jocobian矩阵解析公式。基于Jocobian矩阵公式应用多种非线性系统数值算法找出实现光束目标指向的棱镜转角值。该方法运算复杂,实际应用中可编制计算程序实现反向问题的实时解算。Li于2011年应用二步法推算了双棱镜光束指向系统的准确反向解[17]。即首先基于非近轴矢量光线追迹方法得出准确正向解,然后通过两个步骤推算反向解。第一步是保持一个棱镜不动,旋转另一个棱镜,使出射光束的偏转角达到目标值。第二步是在保持两棱镜的方位夹角不变的条件下同时旋转两个棱镜,使出射光束的方位角达到目标值。该方法大幅度地减小了运算复杂度,可准确地得出反向解析解。
3 理论与技术基础研究进展
旋转双棱镜光束指向控制技术是Risley棱镜扫描技术的延伸。最初的Risley棱镜由一对光楔组成,只能实现光束的小角度偏转[30-31]。随着棱镜加工工艺的进步,旋转双棱镜逐渐能满足光束大角度指向与扫描的光学性能要求;而精密机械和控制技术的发展又使旋转双棱镜指向系统的光束偏转分辨率和精确度得到提升[12]。因此,利用旋转双棱镜系统实现光束的大角度精密转向已成热点研究主题。目前对其基础问题的研究集中在光束转向机制、光束扫描模式、棱镜回转控制、棱镜引起的光束变形、成像色差、成像畸变等方面。
3.1 光束扫描模式方面的研究
在旋转双棱镜激光光束扫描应用中,需要探究光束的扫描模式,揭示光束扫描图案与棱镜结构、回转动态特性之间的内在联系,为系统结构及回转控制方案的设计提供依据。Marshall利用一级近轴近似方法系统研究了旋转双棱镜的扫描模式,分析了不同棱镜顶角、旋转角速度、初始角位置下的光束扫描图案[16]。通过合理设置两棱镜的顶角及旋转角速度的比值,可得到适合形状的扫描图案以满足具体的扫描应用需求。Jeon通过构造旋转矩阵,探讨了任意数目棱镜组成的棱镜组的扫描路径[23]。该方法仍然基于一级近似方程,将导致一定的扫描误差。Li应用非近轴光线追迹方法推导了光束扫描的精确路径并对光束指向表达式做级数展开得出了扫描路径的一级和三级近似分析方法[17,24]。研究结果表明:虽然近似方法和精确方法得出的光束指向角度差异较小,但用于远距离目标扫描和跟踪时,近似方法导致的光束指向位置误差仍然不可忽视。基于Li提出的方法,Horng分析了旋转双棱镜扫描系统中各种不同类型的误差源及其对扫描性能的影响[32]。结果表明:系统加工和棱镜回转控制的细微误差将引起光束扫描模式的明显变化。机械回转轴与系统光轴之间的未对准将严重影响光束指向和扫描精度。
光束扫描模式的研究重点在于光束的扫描路径、扫描覆盖度、扫描速度及扫描精度。扫描路径和扫描覆盖度需要根据具体应用需求设计;扫描速度需结合系统机械动态特性、控制性能及应用需求协同研究;扫描精度除与光束指向分析方法有关外,还取决于系统的加工及安装精度,特别是系统的共轴安装精度。
3.2 棱镜回转控制方面的研究
棱镜回转控制是决定旋转双棱镜系统光束指向精度的重要因素。即由光束的目标指向解算两棱镜的目标旋转方位,设计并优化控制算法控制电机旋转,使两棱镜旋转到目标方位,在尽可能短的时间内实现光束的精确指向调整。Boisset等人针对自由空间光互连的应用需求设计反馈闭环控制双棱镜的旋转,实现了光斑与探测器中心的自动对准[19]。该方法存在2点不足:(1)棱镜旋转控制基于探测器的测量信息,而一些应用中,因光学接收器的探测器视场较小,无法获得最初的测量信息,导致该方法失效。(2)由未对准误差推算棱镜转角时用的是近似方法,准确性受到限制。中科院上海光机所的孙建峰等人利用查表法获得棱镜的目标旋转角并与编码器测出的旋转角比较,将其误差信号输入比例-积分-微分(PID)控制器,控制电机旋转靠近目标值。采用遗传算法优化控制参数后的仿真结果表明该控制系统具有良好的控制性能[33]。Torales利用Adaline神经网络算法实现PID控制,构建了高精度棱镜扫描系统[34]。Sánchez根据目标跟踪的应用需求,针对3个棱镜组成的光束指向系统,优化了PID控制算法以降低棱镜角速度要求[14]。中科院上海光机所刘伟等人针对旋转双棱镜结合快速反射镜构成的粗精光束指向机构,建立了控制环传递函数的数学模型[35]。
3.3 棱镜引起的光束变形方面的研究
旋转双棱镜在使光束转向的同时,会使光束形状发生变化。Schwarze等人初步研究了该变形效果,提出光束压缩因子粗略反比于出射角的余弦[6]。Ostaszewski通过实验得出了不同偏转角下出射光束的剖面照片,探讨了光束压缩效应对远场光强分布的影响[21]。定性结果表明:光束的偏转角越大,光束剖面压缩效应越明显。中科院上海光机所的孙建峰等人基于矢量折射理论,采用光线追迹的方法分析了旋转双棱镜大角度光束扫描中光束形状的变形特征[36]。结果表明:光束变形取决于两棱镜的方位夹角,光束形状在一些方向上被压缩而在另一些方向上被拉伸,但压缩效应表现得更显著。
早期旋转双光楔系统的光束偏转角较小,光束变形现象不明显。对于大角度偏转的旋转双棱镜系统,光束变形现象的影响不可忽略。对于衍射受限的光学系统,旋转双棱镜系统对光束的变形效应将导致相应方向上远场能量分布的改变。压缩效应将使远场能量分布区域变宽,远程接收面上的光束照度减小。对于激光通信应用,该效应将使接收端信号减弱,信噪比降低。
3.4 棱镜引起的成像色差方面的研究
在成像应用中,旋转双棱镜被用来改变成像视轴指向,棱镜引起的色差变得不可忽视[37]。对棱镜色差校正的研究集中在两个方面:(1)采用不同折射率和不同色散的光学材料构建组合棱镜实现色差校正;(2)采用衍射光学元件实现消色差。
组合棱镜方法是色差校正的传统方法,目前已有多家单位利用该方法对大角度旋转双棱镜光束指向系统的宽波段色差校正展开研究。加拿大国防技术研究与发展中心(Defense R&D,Canada)根据其研制的红外眼成像系统应用需求,应用一级近似方法设计了硅-锗组合棱镜用于中波红外波段(3~5 μm)的色差校正。针对远红外波段(8~9.5 μm),应用光学设计软件设计的锗-硫化锌组合棱镜在焦平面上产生的横向色差最大仅为 2.9 μm[38-39]。
美国戴顿大学与肯特州立大学合作,针对红外对抗应用探讨了适合色差校正的红外材料特性,并列出了可供选择的红外材料种类。针对中波红外波段(2~5 μm)组合不同材料构建组合棱镜并应用一级近似光线追迹方法得出了最优化的双棱镜消色差系统[40-42]。其优化的氟化锂/硫化锌组合棱镜在0~45°的光束偏转角内能将残余色差降至1.781 6 mrad。相同的方法用于优化3个棱镜组成的消色差旋转棱镜组,得到的AMTIR-1/Ge组合棱镜其残余色差仅为0.79 mrad。Florea等人针对2~12 μm的红外宽波段,采用硫系玻璃结合适合材料构建了色散低、热学性能好的消色差棱镜[43]。
由于衍射光栅具有负色散特性,在旋转双棱镜系统中加入光栅结构构造折射-衍射杂合棱镜可在一定波段内实现色差校正。Weber等人在硒化锌棱镜表面蚀刻衍射光栅,针对中波红外波段(3~5 μm)制备了衍射校正的双棱镜扫描成像系统。该系统能在45°的视场范围内有效校正色差,系统成像分辨率得到显著提高[44]。Chen利用衍射-折射光学元件组合体(称为Grism)构建了消色差双棱镜系统,有效减小了系统成像的残余色差。该系统的最大光束偏转角为45°,系统成像残余色差在100 μrad以下[4]。利用衍射光学元件校正棱镜色差在一些专利中也有提及[45-46]。
3.5 棱镜引起的成像畸变方面的研究
在成像系统中引入棱镜会带来成像畸变。对于小角度偏转的双棱镜光束偏转系统,图像畸变较小,其影响可以忽略。当光束偏转角增大,成像畸变变得明显。最终的成像畸变大小和畸变特征与棱镜的旋转方位有关,必须针对旋转双棱镜系统的结构特点对其深入探讨并采用合适方法予以校正。Lavigne等人基于三维折射模型分析了旋转双棱镜带来的成像畸变,得出其畸变特征并采用单应变换的方法对其进行了校正。红外和可见光实验结果证实了这种方法的有效性和可行性[20]。
4 产品开发与应用
自Rosell于1960年首次提出利用两块棱镜实现光束扫描以来[47],旋转双棱镜逐渐被作为指向装置应用在不同领域,面向不同应用需求的产品也逐渐问世。根据操作对象的不同,这些应用可以归纳为2个方面:(1)用于改变激光光束指向,控制波前偏移;(2)用于改变成像视轴指向,移动成像视场。根据目的的不同,旋转双棱镜的应用也分为2个方面:(1)用作光束或成像视轴扫描器,(2)用于远距离目标指向、瞄准与跟踪。旋转双棱镜扫描器的目的是将激光光束或成像视轴按一定的扫描路径投射到系列不同空间指向点,在一定范围内实现扫描覆盖。旋转双棱镜的目标指向跟踪应用是根据目标位置实时调整棱镜方位,达到高精度动态目标瞄准与跟踪的目的。
4.1 产品开发现状

图3 典型旋转棱镜光束指向装置Fig.3 Representative rotational-prisms-based beam steering devices

表1 几种典型旋转棱镜光束指向装置的性能参数Tab.1 Performance parameters of the representative rotational-prisms-based beam steering devices
美国已有多家研究机构针对旋转双棱镜大角度光束指向展开了研究,开发了系列光束指向控制装置。图3和表1分别列出了目前有报道的几种典型装置的外形图和主要性能参数,包括工作波长、光束口径、视场宽度、指向精度、全场反应时间、反应带宽、系统直径、长度及质量。1、2、3号装置为美国OPTRA公司分别针对红外对抗、机载激光通信及光学避障的应用需求开发的旋转双棱镜红外光束指向控制系统,已形成商业产品投放市场[6,9,11]。1 号装置结构紧凑,适宜用在空间受限载体平台上实现光束的大角度精确指向。2号装置可控制大口径光束,其瞄准重复精度达到30 μrad。3号装置可实现光束连续和步进扫描,扫描速度可达6 000 r/min,分辨率达到25 μrad。4号装置为美国鲍尔航空技术公司(Ball Aerospace&Technologies Corp.)所研制,可实现大口径光束的大角度转向[14,21]。该系统由3块旋转棱镜组成,具有很高的指向精度和良好的跟踪性能,适合跟踪动态目标,其平稳跟踪速度可达10°/s。5号装置为美国ITT-AES公司研制,能同时对1.55 μm的红外光和38 GHz的射电束实现转向[5]。6号装置是美国洛克希德-马丁高技术中心(Lockheed Martin Advanced Technology Center)设计用于空间飞行器平台的微型光束指向调整系统[12],具有很高的指向精度和紧凑的结构。
4.2 激光光束指向调整方面的应用
利用旋转双棱镜偏转激光光束,可用于在自由空间光通信、直视通信、星间通信中建立远距离通信链路[9]。通信光束通常需要在两远距离动态目标间传输,高精度光束指向是影响系统性能的重要因素[10]。用旋转双棱镜代替传统万向转架或指向镜系统实现目标瞄准和跟踪,不但能满足大口径光束偏转的要求,实现高分辨率稳定指向,还可使系统更紧凑,便于载体平台结构的设计和安装。美国鲍尔航空技术公司和OPTRA公司针对激光通信应用已研制了相应的旋转棱镜指向机构[11,21]。鲍尔公司还将旋转棱镜应用于偏转微波波束,设计微波直视天线,用于无人系统之间、无人系统与地面站间的通信连接[48-50]。旋转双棱镜在美国国家航空航天局(NASA)的下一代卫星测距系统(NGSLR)中用作发射器指向机构(TPA),实现对卫星的精密指向[51]。2003年发射的地球科学激光测高系统(GLAS)也采用旋转双棱镜实现激光束的精确指向[52-53]。为在自由空间激光通信中实现光束的精确控制,中科院上海光机所以刘立人为首的研究小组对旋转双棱镜光束指向系统进行了系列深入研究,设计的粗调光束扫描系统可在超过±15°的竖直和水平角范围内实现优于 50 μrad的扫描精度[54-56],设计的精调光束扫描系统可实现0.8 μrad的扫描精度[57]。
利用旋转双棱镜偏转激光光束,可使激光雷达、激光制导、激光武器、激光指示器等实现光束扫描、目标瞄准与跟踪。在激光雷达系统中旋转双棱镜常被用于激光光束扫描,其示意图如图4所示。1981年,NASA将一对锗光楔作为激光光束扫描器用于激光雷达系统中,飞行测试表明:该雷达能在20°的范围内实现光束扫描,其指向误差 < 0.1°[28,58-59]。同年,美国林肯实验室将旋转双棱镜用于三维成像激光雷达系统,作为激光光束扫描器以扩大观测场。该扫描器使雷达能在10.8°的观测覆盖范围内实现高分辨率三维成像[60]。美国Sigma空间公司近来研制的三维成像激光雷达将旋转双棱镜用作光束扫描器,其重复扫描精度达到0.000 5°[61]。近来还有专利报道了旋转双棱镜在机载光收发机构中的具体应用[62]。
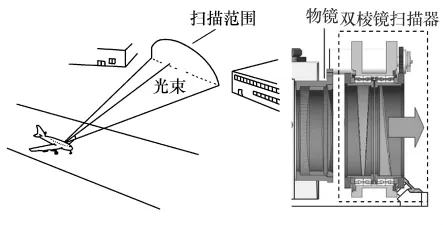
图4 激光雷达中的旋转双棱镜扫描器Fig.4 Rotational-double-prism scanner in laser radar
利用旋转双棱镜偏转激光光束,可在光纤激光通信中用于设计光开关[63-65],其结构示意如图5所示。利用1对或2对旋转双棱镜构造光束角度调整元件,重定向光束实现输入光纤和输出光纤间的光耦合。构造旋转双棱镜阵列可实现多向通道光路的切换。该类机构可操作宽波段激光,具有适当的切换速度,插入损耗小,工作稳定性好[66]。
利用旋转双棱镜偏转激光光束,可在干涉系统中用作波前指向器实现波前分析与光学检测[67]。Garcia-Torales等人在其设计的矢量剪切干涉仪中将旋转双棱镜用作剪切机构,实现剪切波前偏移和倾斜[26,68-70]。通过精确控制棱镜的旋转,在不改变成像方向的前提下偏转光束,产生波前偏移,控制波前位置和波前倾斜。旋转双棱镜的波前偏转性能已被实验所验证。

图5 光纤光开关中的旋转双棱镜机构Fig.5 Rotational-double-prism devices in optical fiber switch
4.3 大范围目标搜索、识别与跟踪成像方面的应用
旋转双棱镜可在红外对抗系统中用于调整成像视轴指向以实现目标搜索、瞄准与跟踪。为探测和跟踪威胁物(如红外制导导弹),红外对抗系统需要调整成像视轴,使威胁物实时成像在视场中心,以锁定目标实现准确、精密的稳定指向和跟踪。传统的万向架或指向镜机构虽可实现指向和跟踪,但系统需伸出载体之外,影响载体载荷能力。利用旋转双棱镜调整视轴,移动视场,可根除传统指向系统的不足,形成紧凑、共形成像系统[6,40]。基于旋转双棱镜的指向和跟踪系统适合应用于星载、机载、舰载等安装空间受限的载体平台。目前,已有相关专利提出了旋转双棱镜在光电对抗[71]、导弹导引头[72]、安防相机[73]等机构中的应用。在光电侦察、监视、搜索、营救等应用中为实现目标的快速搜索、识别和跟踪,需要获取宽幅面、高分辨率的图像信息。由于成像探测器、光机结构尺寸和工艺的制约,很难通过一次成像来兼顾大视场和高分辨率的要求。加拿大国防技术研究与发展中心利用旋转双棱镜构建了步进-凝视成像系统,形成了一种新型的多视场图像采集方法[74]。图6展示了系统图像采集方法及相应旋转双棱镜指向机构外观图。系统利用旋转双棱镜改变成像光轴,在较大角度范围内实现视轴扫描。通过合理设置成像视轴的空间指向角度和窄视场分块成像,获得系列高分辨率窄视场图像,通过窄视场图像的校正和拼接,最终获得具有大视场和高分辨率特点的合成图像。该系统利用旋转双棱镜构造光机指向机构,用于成像视轴的转向和扫描。通过融合窄视场成像,兼顾了大视场和高分辨率的成像需求,为大范围目标搜索和高准确度目标识别应用提供了一种有潜力的新概念图像采集方法。

图6 步进-凝视图像采集方法及旋转双棱镜指向机构Fig.6 Step-stare image gathering and relevant rotational-double-prism system
利用旋转双棱镜实现视轴扫描,可以扩大成像视场,相关机构已被应用于显微观测、生物医学成像、机器视觉等领域。传统的显微镜视场小、视轴固定,不能提供足够的视觉信息以实现多目标、动态目标的观测。在显微镜中加入扫描机构实现视轴扫描,成像视场能得到大幅度拓宽。目前已有多项研究采用旋转双棱镜充当视轴扫描机构,形成的光学扫描显微系统结构紧凑,成像视场大,分辨率高,可用于生物医学、微机电等领域的显微观测[13,75-76]。在眼科检查中可利用旋转双棱镜进行双目调视测量[77-78],即通过旋转一对顶角很小的光楔,改变双眼的视轴,实现较小角度范围内的视轴扫描。将旋转双棱镜用于光学相干层析技术(OCT)中实现扫描成像,便于构建结构紧凑的OCT系统[79];用于内窥镜系统,可实现大视场观察[80]。旋转双棱镜还可用于机器人视觉跟踪,利用双棱镜的旋转动态地偏转激光光束实现整体扫描,扩大扫描场以实现多目标激光跟踪[81]。在隐蔽光学监视的针孔成像系统中,旋转双棱镜能作为双向倾斜机构扩大观测视场[82]。利用旋转双棱镜调整视轴可实现成像稳定。在大型天文望远镜系统中旋转双棱镜常被用来实现大气散射补偿[83]。结合透镜和旋转双棱镜构建消像差系统,可有效校正共形整流罩引起的动态像差[84]。
5 工程技术难题
虽然旋转双棱镜结构简单,但用于大角度高精度光束指向时仍存在一些机械、控制及光学方面的工程技术问题有待深入探讨[21]。
5.1 棱镜加工装调方面的问题
一些光束指向应用要求光束指向机构能够在一定范围内实现光束的全场瞄准,但实际的旋转双棱镜系统难以避免地存在指向盲区。理论上,只有当两棱镜的顶角、折射系数完全相同且理想装调时,组建的系统才可实现光束指向的全场覆盖。实际应用中,由于系统加工误差、装配误差及热学性能变化等因素的影响,两棱镜的光束偏转角难以完全抵消,出射光束不能转向系统中心轴附近的空间指向区,即产生指向盲区[9,13,85]。取决于棱镜的加工精度和装调精度,中心轴附近的指向盲区范围可达几到几百微弧度[21]。
误差也是旋转双棱镜光束转向中需要关注的问题。实际加工得到的棱镜,其结构参数、折射系数不可避免地与标称值或理论值存在偏差。当系统工作在变化的气候条件下时,棱镜参数也将随之改变而产生误差。系统装调时,棱镜、旋转轴倾斜将导致对准误差。这些加工、装调及环境变化带来的误差将降低光束的指向精度,影响系统光束指向性能[32]。高精度光束指向系统要求具有较高的加工和安装精度,并需在系统设计时考虑和减弱环境的影响。
5.2 光机电综合设计与协同控制方面的问题
旋转双棱镜光束指向控制系统的综合设计和多学科协同控制是实际应用中面临的难题。系统设计时,要根据具体的应用需求,综合考虑光学、机械、控制、传感、图像信息处理等多学科影响因素。在深入分析双棱镜光束偏转机制、扫描模式、成像机制的基础上,设计系统的机械机构,优化棱镜回转控制算法,设计合适的伺服控制电路。在激光光束指向调整应用中,需要结合光束传输、机械动态特性、伺服机构性能、控制性能来实现系统的综合设计。在成像应用中,除考虑上述因素外,还需考虑成像性能、图像信息的传输与处理等。
在双棱镜系统的多学科协同控制中,非线性和奇异性是重要的研究主题。即使两棱镜顶角、折射系数完全相同且棱镜精确对准,系统中心轴方向及附近区域仍存在控制上的奇异点。即光束沿一定方向趋近中心轴时,要求棱镜旋转速度趋向无穷大,这对伺服驱动及控制提出了挑战[13-14,40]。控制奇异点为目标跟踪应用提出了难题。当系统瞄准线跟踪目标到中心轴附近时,系统无法对目标实现实时、连续、平滑地指向和跟踪[14]。
在远离系统中心轴的光束指向区域,仍存在非线性控制问题。与传统的万向架或指向镜系统不同,双棱镜系统对光束的最终转向角度与棱镜旋转角度之间的关系是非线性的,这导致棱镜旋转控制方程的非线性。目前,实现非线性控制的基本思路是利用查表法或局部线性算法逆解控制方程,得出最终的棱镜旋转方位[21]。也可用二步法求解反向问题,得出为得到预定的光束指向所需的棱镜旋转角度。光束转向角与棱镜旋转角间的非线性关系加大了系统控制难度,需要设计复杂的控制算法来满足应用中光束转向的需求。
5.3 棱镜对光束质量、成像质量影响方面的问题
旋转双棱镜系统必须解决的一个重要问题是色差校正。在光束转向应用中,由于操作对象大多为激光光束,其单色性较好,色差影响较小。但在视轴转向应用中,成像光的波段宽,棱镜导致的色差将明显降低成像像质,必须设计特殊结构的棱镜实现色差校正。针对旋转棱镜光束指向系统进行色差校正面临的挑战主要包括4个方面,即大角度光束偏转、宽波段覆盖、系统质量和结构紧凑性、材料选择及加工可行性。光束偏转角越大,消色差波段越宽,色差校正的难度越大。传统组合棱镜方法虽能有效实现色差校正,但也增加了体积和重量,影响了系统的紧凑性和轻便性,限制了其实际应用,这在可见和近红外波段表现尤为明显[38]。衍射光学元件方法仅在棱镜表面蚀刻光栅结构,能有效减小系统体积和重量,但同时也增大了加工难度。
当利用旋转双棱镜系统实现大角度光束转向时,系统将使光束形状发生变形,导致光束远场能量分布的改变,影响远程激光通信系统的整体性能。在成像应用中,大角度视轴偏转下的成像畸变现象严重,难以满足应用需求。为在成像场和场景间建立准确性高的映射关系,必须采用合适方法对成像畸变基本予以校正。
热稳定性能也是旋转双棱镜光束指向系统需要关注的问题。在温度变化的环境下,系统对光束的偏转角随环境温度改变,光束指向的稳定性受到影响。为改善热稳定性能,在设计消色差棱镜时,需从热波动的角度组合棱镜材料,兼顾色差校正和热稳定性能[85]。
6 结束语
旋转双棱镜系统以其结构紧凑、准确性高、速度快、偏转角度大、动态性能好、环境适应性好等优点,为大角度光束或成像视轴指向调整提供了一种颇具潜力的新方法,在航天、军用、民用诸多领域中的光束扫描、目标瞄准与跟踪等方面呈现了广阔的应用前景。目前,对该课题的研究主要集中在光束偏转机制、扫描模式、棱镜回转控制、棱镜带来的色差、畸变等方面。针对具体应用需求已设计开发了多种相关光束或视轴指向扫描系统。旋转双棱镜系统面临指向盲区、控制奇异点、色差校正、畸变校正等方面的难题。针对扫描和目标跟踪应用需求,设计和研究大偏转角度、宽波段覆盖的复合型或改进型旋转双棱镜系统,成为该课题目前的研究热点。
从偏转角度方面分析,早期的旋转双棱镜系统大多局限于较小角度的光束偏转应用。目前,采用高折射率、大顶角棱镜构造旋转双棱镜机构,使大角度光束或视轴偏转成为可能,系统的光束扫描或目标搜索范围显著扩大。从波段方面分析,在自由空间激光通信、激光雷达等应用中,被偏转的光束为带宽窄、单色性好的激光束,因此,棱镜带来的色散效应表现不突出,旋转双棱镜系统结构设计相对简单。利用组合棱镜或衍射元件方法设计棱镜,可在较宽波段范围内实现消色差,使旋转双棱镜系统成像应用成为可能。从偏转对象分析,以前的旋转双棱镜系统大多用于光束的指向调整,典型的应用有激光雷达、激光通信、激光制导等。目前,旋转双棱镜的视轴指向调整应用正快速发展,典型应用有红外对抗、扫描成像等。
旋转双棱镜系统的传统应用为光束扫描,即让两棱镜以不同的旋转速度沿相同或相反方向恒速旋转,使出射光束按一定的扫描图案在一定的角度范围内实现满场扫描;而目前在红外对抗、自由空间激光通信等应用中,旋转双棱镜需要实现光束/视轴指向稳定和目标实时平滑跟踪功能。光束/视轴指向稳定是指在动载体平台、热波动、大气扰动等环境因素的影响下,实现光束指向稳定或稳像。目标跟踪要求系统瞄准线实时指向和跟踪目标。
目前,基于旋转双棱镜设计和开发改进型或复合型光束指向系统已成研究热点。利用旋转双棱镜结合高精度平台、微动机构构造复合型光束指向系统,可实现粗精两级光束/视轴指向调整。在双棱镜机构中加附加结构设计改进系统,可大幅提高光束的指向精度,解决棱镜回转控制问题。典型设计如在双棱镜系统中加入一附加棱镜[14,21],或在棱镜上增加转轴[10],使系统增加控制自由度,可有效解决指向盲区和奇异点问题。
总之,利用旋转双棱镜可实现宽波段光束或成像视轴的大角度精密指向调整,可用于光束/视轴指向稳定、扫描和目标跟踪,在激光通信、红外对抗等领域呈现出广泛的应用潜力。
[1] DILLON T E,SCHUETZ C A,MARTIN R D,et al..Nonmechanical beam steering using optical phased arrays[J].SPIE,2011,8184:81840F.
[2] 孙辉,郎小龙,李志强,等.动载体光电平台视轴稳定精度的检测[J].光学 精密工程,2011,19(9):2131-2137.SUN H,LANG X L,LI ZH Q,et al..Measurement for LOS stabilization accuracy of electro-optical imaging system on moving carrier[J].Opt.Precision Eng.,2011,19(9):2131-2137.(in Chinese)
[3] 李焱,曹立华,王弟男.惯导平台下舰载光电搜索跟踪系统的控制[J].光学 精密工程,2011,19(5):1126-1133.LI Y,CAO L H,WANG D N.Controlling of shipborne optoelectronic searching and tracking system based on inertial navigation platform[J].Opt.Precision Eng.,2011,19(5):1126-1133.(in Chinese)
[4] CHEN C B.Beam steering and pointing with counter-rotating grisms[J].SPIE,2007,6714:671409.
[5] WINSOR R,BRAUNSTEIN M.Conformal beam steering apparatus for simultaneous manipulation of optical and radio frequency signals[J].SPIE,2006,6215:62150G.
[6] SCHWARZE C R,VAILLANCOURT R,CARLSON D,et al..Risley-prism based compact laser beam steering for IRCM,laser communications,and laser radar[EB/OL].[2012-07-11].http://www.optra.com/images/TP-Compact-Beam-Steering.pdf.
[7] ULANDER K.Two-axis beam steering mirror control system for precision pointing and tracking applications[D].Sanluis Obispo,CA:Faculty of California Polytechnic State University,2006.
[8] KIM B S,GIBSON S,TSAO T.Adaptive control of a tilt mirror for laser beam steering[C]//American Control Conference,2004.Proc.of the 2004,Boston,MA,USA,Jun.30-Jul.2,2004.
[9] SCHWARZE C.A new look at risley prisms[J].Photonics Spectra,2005,40(6):67-70.
[10] LI A,JIANG X,SUN J,et al..Laser coarse fine coupling scanning method by steering double prisms[J].Appl.Opt.,2012,51(3):356-364.
[11] SCHUNDLER E,CARLSON D,VAILLANCOURT R,et al..Compact,wide field DRS explosive detector[J].SPIE,2011,8018:80181O.
[12] CLARK C S,GENTILE S.Flight miniature Risley prism mechanism[J].SPIE,2009,7429:74290G.
[13] II W C W,DIMARZIO C A.Dual-wedge scanning confocal reflectance microscope[J].Optics Lett.,2007,32(15):2140-2142.
[14] SANCHEZ M,GUTOW D.Control laws for a three-element Risley prism optical beam pointer[J].SPIE,2006,6304:630403.
[15] HARVEY J E.Geometrical optics and image science(OSE 5203):plane mirrors and prisms[EB/OL].[2012-07-11].http://imaging.creol.ucf.edu/OSE5203/02%20Lectures//.0%Infro.pdf.
[16] MARSHALL G F.Risley prism scan patterns[J].SPIE,1999,3787:74-86.
[17] LI Y.Closed form analytical inverse solutions for Risley-prism-based beam steering systems in different configurations[J].Appl.Opt.,2011,50(22):4302-4309.
[18] YANG Y.Analytic solution of free space optical beam steering using risley prisms[J].J.Lightwave Technol.,2008,26(21):3576-3583.
[19] BOISSET G C,ROBERTSON B,HINTON H S.Design and construction of an active alignment demonstrator for a freespace optical interconnect[J].Photonics Technology Lett.,1995,7(6):676-679.
[20] LAVIGNE V,RICARD B.Fast Risley prisms camera steering system:calibration and image distortions correction through the use of a three-dimensional refraction model[J].Optical Eng.,2007,46(4):43201.
[21] OSTASZEWSKI M,HARFORD S,DOUGHTY N,et al..Risley prism beam pointer[J].SPIE,2006,6304:630406.
[22] WOLFE W L,ZISSIS G J.Optical-mechanical Scanning Techniques and Devices[M].Michigan,US:Environmental Research Institute of Michigan,1989.
[23] JEON Y.Generalization of the first-order formula for analysis of scan patterns of Risley prisms[J].Optical Eng.,2011,50(11):113002.
[24] LI Y.Third-order theory of the Risley-prism-based beam steering system[J].Appl.Opt.,2011,50(5):679-686.
[25] ZEMAX D C.Optical Design Program User's Guide[M].Tusson,AZ:Focus Software,Incorporated,2005.
[26] GARCIA-TORALES G,STROJNIK M,PAEZ G.Risley prisms to control wave-front tilt and displacement in a vectorial shearing interferometer[J].Appl.Opt.,2002,41(7):1380-1384.
[27] SIROHI R S,KOTHIYAL M P.Double wedge plate shearing interferometer for collimation test[J].Appl.Opt.,1987,26:4054-4055.
[28] AMIRAULT C T,DIMARZIO C A.Precision pointing using a dual-wedge scanner[J].Appl.Opt.,1985,24(9):1302-1308.
[29] DEGNAN J J.Ray matrix approach for the real time control of SLR2000 optical elements[C]//Proc.of the 14th International Workshop on Laser Ranging,San Fernando,Spain,Jun.7-11,2004.
[30] JENKINS F R,WHITE H E.Fundamentals of Optics Fourth Edition[M].New York:McGraw-Hill Companies,Inc.,2001.
[31] WOLFE W L.Introduction to Infrared System Design[M].Bellingham:SPIE,Verlage,1996.
[32] HORNG J,LI Y.Error sources and their impact on the performance of dual-wedge beam steering systems[J].Appl.Opt.,2012,51(18):4168-4175.
[33] SUN J,LIU L,YUN M,et al..Double prisms for two-dimensional optical satellite relative-trajectory simulator[J].SPIE,2004,5550:411-418.
[34] GARCIA-TORALES G,FLORES J L,MUNOZ R X.High precision prism scanning system[J].SPIE,2007,6422:64220X.
[35] WEI L,LIREN L,JIANFENG S.Control loop analysis of the complex axis in satellite laser communications[J].SPIE,2010,7814:781410.
[36] SUN J,LIU L,YUN M,et al..Distortion of beam shape by a rotating double-prism wide-angle laser beam scanner[J].Optical Eng.,2006,45(4):43001-43004.
[37] SASIAN J M.Aberrations from a prism and a grating[J].Appl.Opt.,2000,39(1):34-39.
[38] LACOURSIERE J,DOUCET M,CURATU E O,et al..Large-deviation achromatic Risley prisms pointing systems[J].SPIE,2002,4773:123-131.
[39] CURATU E O,CHEVRETTE P C,ST-GERMAIN D.Rotating-prism scanning system to equip an NFOV camera lens[J].SPIE,1999,3779:154-164.
[40] BOS P J,GARCIA H,SERGAN V.Wide-angle achromatic prism beam steering for infrared countermeasures and imaging applications:solving the singularity problem in the two-prism design[J].Optical Eng.,2007,46(11):113001.
[41] DUNCAN B D,BOS P J,SERGAN V.Wide-angle achromatic prism beam steering for infrared countermeasure applications[J].Optical Eng.,2003,42(4):1038-1047.
[42] GIBSON J L,DUNCAN B D,BOS P,et al..Wide angle beam steering for infrared countermeasures applications[J].SPIE,2002,4723:100-307.
[43] FLOREA C,SANGHERA J,AGGARWAL I.Broadband beam steering using chalcogenide-based Risley prisms[J].Optical Eng.,2011,50(3):33001.
[44] WEBER D C,TROLINGER J D,NICHOLS R G,et al..Diffractively corrected Risley prism for infrared imaging[J].SPIE,2000,4025:79-86.
[45] SPARROLD S W.Beam steering optical arrangement using risley prisms with surface contours for aberration correction:US6344937B1[P].2002-2-5.
[46] JACKSON J E.Conformal beam steering devices having a minimal volume and window area utilizing risley prisms and diffraction gratings[P].2007-2-1.
[47] ROSELL F A.Prism scanner[J].J.Opt.Soc.Am.,1960,50:521-526.
[48] DAS S,OLSEN R,MEAGHER C,et al..New approaches to directional antenna technologies for unmanned system communications[C]//Antennas and Propagation Socity International Symposium(APSURSI),2010,IEEE,Toronto,CA,Jul.11-17,2010.
[49] RUPAR M,FREEMAN A,VOREES B,et al..A Tactical Reachback Extended Communications(TREC)capability[C]//The 2010 Military Communications Conference,2010:255-260.
[50] TAME B J,STUTZKE N A.Steerable Risley prism antennas with low side lobes in the Ka band[C]//Wireless Information Technology and Systems(ICWITS),2010 IEEE International Conference on Honolulu,HI,Aug.28-Sept.3,2010.
[51] DEGNAN J,MCGARRY J,ZAGWODZKI T,et al..Transmitter point-ahead using dual risley prisms:theory and experiment[C]//Proc.of the 16th International Workshop on Laser Ranging,Poznan,Poland,Oct.12-17,2008.
[52] AFZAL R S,YU A,DALLAS J L.The Geoscience Laser Altimeter System(GLAS)laser transmitter[J].IEEE J,Selected Topics In Quantum Electronics,2007,13(3):511-536.
[53] HAKUN C,BUDINOFF J,BROWN G,et al..A boresight adjustment mechanism for use on laser altimeters[C]//37th Aerospace Mechanisms Symposium.Johnson Space Center,Houston,US,May 19-21,2004.
[54] LUAN Z,LIU L,WANG L,et al..Large-optics white light interferometer for laser wavefront test:apparatus and application[J].SPIE,2008,7091:70910Q.
[55] WANG L,LIU L,LUAN Z,et al..The mechanical design of the large-optics double-shearing interferometer for the test of the diffraction-limited wave front[J].SPIE,2008,7091:70910S.
[56] SUN J,LIU L,YUN M,et al..The effect of the rotating double-prism wide-angle laser beam scanner on the beam shape[J].Optik,2005,116:553-556.
[57] LI A,LIU L,SUN J,et al..Research on a scanner for tilting orthogonal double prisms[J].Appl.Opt.,2006,45:8063-8069.
[58] DIMARZIO C,KRAUSE M,RCHANDLER,et al..Airborne lidar dual wedge scanner:eleventh international laser radar conference[C]//Eleventh International Laser Radar Conference,University of Wisconsin-Madison:NASA,Jun.21-25,1982.
[59] DIMARZIO C,HARRIS C,BILBRO J W,et al..Pulsed laser doppler measurements of wind shear[J].Bull.Am.Meteorol.Soc.,1979,60:1061.
[60] MARINO R M,DAVIS W R.Jigsaw:a foliage-penetrating 3D imaging laser radar system[J].Lincoln Laboratory J.,2005,15(1):23-36.
[61] DEGNAN J,MACHAN R,LEVENTHAL E,et al..Inflight performance of a second generation,photon counting,3D imaging lidar[J].SPIE,2008,6950:695001.
[62] CHEN C W.Optical device with a steerable light path:US,7813644B2[P].2010-10-12.
[63] CHU C.Double Risley prism pairs for optical beam steering and alignment:US,20040057656[P].2004-3-25.
[64] SNYDER J J.Single channel M X N optical fiber switch:US,6636664B2[P].2003-10-21.
[65] CORMACK R H.1XN Optical fiber switch:US,6597829B2[P].2003-7-22.
[66] SWEATT W C.Optical switch using Risley prisms:US,6549700B1[P].2003-4-15.
[67] 朱勇建,那景新,潘卫清,等.条纹周期动态可调的通用型干涉仪[J].光学 精密工程,2012,20(1):109-116.ZHU Y J,NA J X,PAN W Q,et al..Universal interferometer based on dynamically-adjusted fringe periods[J].Opt.Precision Eng.,2012,20(1):109-116.(in Chinese)
[68] GARCIA-TORALES G,FLORES J L,ALVAREZ-BORREGO J.Alignment of vectorial shearing interferometer using a simple recognition algorithm[J].SPIE,2008,7073:707321.
[69] GARCIA-TORALES G,FLORES J L.Vectorial shearing interferometer with a high resolution phase shifter[J].SPIE,2007,6723:672330.
[70] PAEZ G,STROJNIK M.Versatility of the vectorial shearing interferometer[J].SPIE,2002,4486:513-522.
[71] ADAMS D J.Scanner/pointer apparatus having super-hemispherical coverage:US,7336407B1[P].2008-2-26.
[72] SPARROLD S W.Missile seeker having a beam steering optical arrangement using Risley prisms:US,6343767B1[P].2002-2-5.
[73] WINSOR R S.Security camera system and method of steering beams to alter a field of view:US,2009/0079824A1[P].2009-3-26.
[74] LAVIGNE V,RICARD B.Step-stare image gathering for high-resolution targeting ADA472001[R].U.S.Department of Commerce,National Technical Information Service,2005.
[75] TAO X,CHO H,JANABI-SHARIFI F.Optical design of a variable view imaging system with the combination of a telecentric scanner and double wedge prisms[J].Appl.Opt.,2010,49(2):239-246.
[76] II W C W,GUERRERA S A.Efficient confocal microscopy with a dual-wedge scanner[J].SPIE,2009,7184:71840M.
[77] LU H D,CHEN G,TS'O D Y,et al..A rapid topographic mapping and eye alignment method using optical imaging in Macaque visual cortex[J].Neuro Image,2009,44:636-646.
[78] STAHL J S,LEHMKUHLE M,WU K,et al..Prospects for treating acquired pendular nystagmus with servo controlled optics[J].Investigative Ophthalmology & Visual Science,2000,41(5):1084-1090.
[79] DUMA V,ROLLANDA J P,PODOLEANUC A G.Perspectives of optical scanning in OCT [J].SPIE,2010,7556:75560B.
[80] KIM K,KIM D,MATSUMIYA K.Wide FOV wedge prism endoscope[C].Proceedings of the 2005 IEEE-EMBS,27th Annual International Conference,Shanghai,China,Sept.1-4,2005.
[81] SOUVESTRE F,HAFEZ M,REGNIER S.DMD-based multi-target laser tracking for motion capturing[J].SPIE,2010,7596:75960B.
[82] RANA H S.Lens technology incorporating internal pan/tilt and zoom[J].SPIE,2008,7100:710001.
[83] DOUGLASS G G,HINDSLEY R B,WORLEY C E.Speckle interferometry at the us naval observatory.I.[J].The Astrophysical J.Supplement Series,1997,111(7):289-334.
[84] LI Y,LI L,HUANG Y.Conformal optical design using counterrotating wedges and Zernike fringe sag surfaces[J].SPIE,2008,7133:713340.
[85] AYERS G J,CIAMPA M A,VRANOS N A.Holographic optical beam-steering[EB/OL].(2010-10-13)[2012-07-11].http://www.wpi.edu//Pups/E-project/Availabel/E-project-101310-153124/unrestricted/HOBS-Final-presentation.pdf.
猜你喜欢
天水行政学院学报(2022年4期)2022-11-18
法律方法(2022年2期)2022-10-20
宝钢技术(2022年2期)2022-07-09
阅读(科学探秘)(2022年5期)2022-06-07
奥秘(2021年3期)2021-04-12
学苑创造·A版(2019年4期)2019-05-10
温州大学学报(自然科学版)(2019年1期)2019-03-30
时代汽车(2018年2期)2018-05-31
三联生活周刊(2017年37期)2017-09-11
摄影之友(影像视觉)(2017年1期)2017-07-18
