
研制高空树木砍伐装置*
2013-03-09 07:12曹征领曹志坚
湖州师范学院学报 2013年1期
曹征领,曹志坚,王 俊
(国网浙江省电力公司湖州供电公司,浙江 湖州 313000)
0 引言
随着输电线路通道内树木的生长,树木与输电线路导线之间的距离不满足放电间隙安全距离时,导线会对树木产生放电现象,对人员、设备安全构成严重的危害.现阶段输电线路通道内树木砍伐工作中,多采用原始的人工砍伐方式,无法百分百的保证作业人员和设备的安全.本文提出研制一种可控倒落树梢装置来解决通道处理工作中遇到的棘手问题.
1 线路走廊内树木砍伐的必要性
随着树木的生长,树木与输电线路导线之间的距离不满足放电间隙安全距离时,导线会对树木产生放电现象,对人员、设备安全构成严重的危害.线路导线与树木之间的净空距离,在大风情况下,应不小于表1所列数值[1].

表1 导线在最大弧垂、最大风偏时与树木之间的安全距离(DL/T741-2001)
由于对植物环保绿化的要求以及树木种植方对树木连根砍伐经济补偿要求颇高等现实棘手问题的存在,线路运行管理部门在实际工作中应多采用砍伐树梢的做法.如果线路走廊内有树木与导线安全距离不满足表1要求就要及时清理砍伐,留下一定时间内不威胁线路安全运行的裕度距离空间.
2 现阶段通道处理工作分析
现阶段实际树木砍伐工作中树梢的倒落方向只是靠砍伐作业人员的经验控制.这种原始的作业方式的安全性与作业人员的技能有非常大的关系,不能很好的控制树木倒向,在实际工作中无法百分百的保证作业人员和倒落下方设备的安全.
针对砍伐树梢过程中影响工作安全和工作效率的问题,提高工作效率和安全性,施工作业人员能力和经验比较难以提高.只能从砍伐工具着手,采用一种可靠的砍伐工作.因为利用传统的砍伐树梢工具不能满足现有的工作要求.
3 解决方案的选择
要解决工作中砍伐树木的下落方向和速度问题,就要控制它的受力情况.在砍伐过程中,砍伐的树梢下落速度主要是受到重力加速度g影响,在竖直方向施加一个向上的平衡力就能有小控制下落的速度.而要控制树梢的倒向问题,就要加以一个水平的拉力.
(1)工作点安装一个受力的支点,通过支点的绳索来控制树梢受力和方向.采用定滑轮可对树梢受力和方向进行有效控制.主体为抱杆型支柱,在抱杆顶安装一定滑轮.利用树干稳定性将装置固定在树干上,这样既保证了装置的稳定性,也减少了参加工作的人数.装置主体如图1所示.
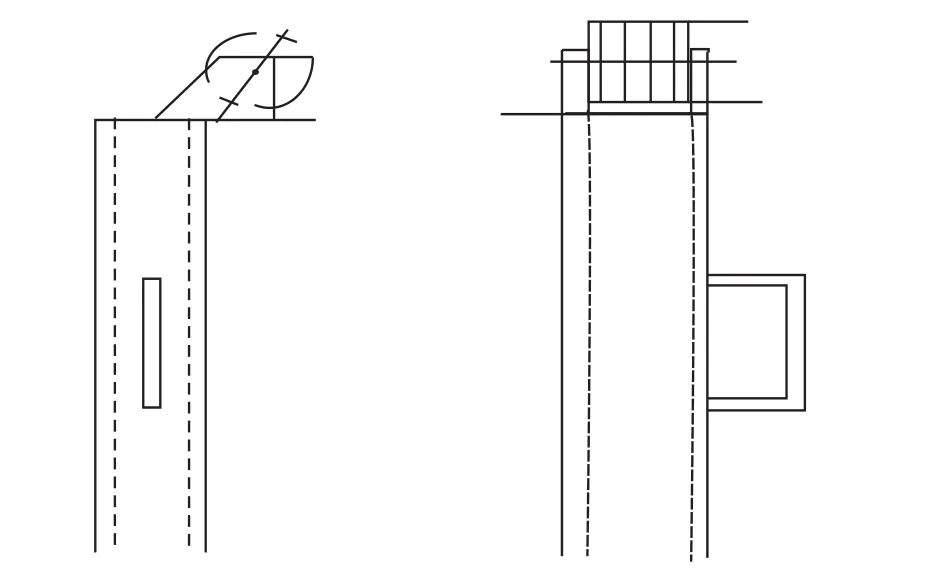
图1 初步装置顶部研制图
(2)结合树木生长高度,如果抱杆的长度有10 m左右,则将完全能确保工作完成.但装置的运输决定了装置不能有如此长的长度.砍伐装置可拆分成4段,每段3 m.在运输过程中可拆分,方便运输,到达工作点按照实际的工作需要可加以安装.在两段抱杆连接处,采用内外套环加螺栓固定的方式.在每段抱杆顶部有一段可插入上一段抱杆的内套环,同时有2个直径20 cm的孔可插入螺栓加以固定.
(3)每段抱杆上都加装一个提环,以便在砍伐作业时能确保装置至少有两个提环可供装置有效固定在树干上.
通过初步的设想,邀请外协单位生产出了初步的产品.在使用该装置进行现场工作中,小组在110kV州和1556线29#~30#下方的砍伐树木工作中试使用了该装置.在砍伐树木过程中发现该装置基本能满足工作的需要,但是其还需要解决登高作业人员要借助梯子等攀爬树木、遇到需要大转角的改变树梢下落方向时很难起到作用的问题.
4 装置设计改进
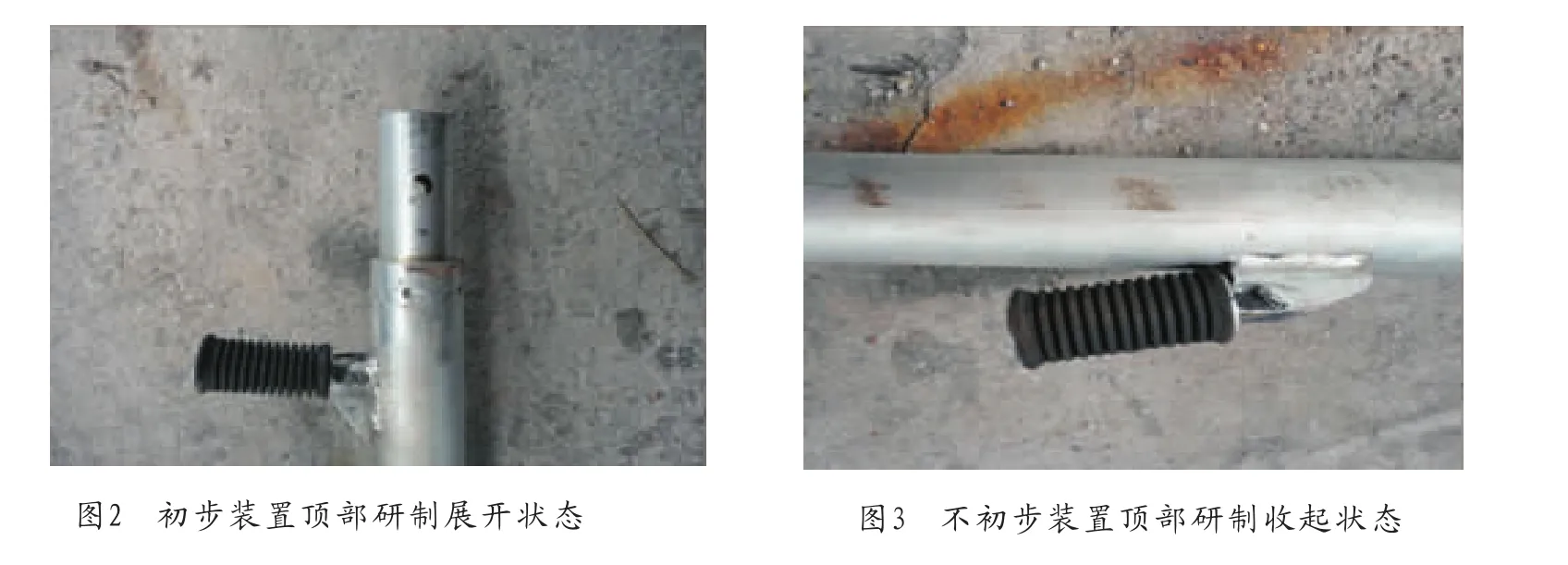
(1)在抱杆壁上安装踏板登高装置,方便作业人员登高.登高踏板表面采用树胶材质制成,有防滑作用.底部和报告连接处有一铰链可90°曲折,在不用时可以收起来,用时展开.图2为展开情况,图3为收起情况.
(2)遇到需要改变树梢下落大转角方向时,选定在抱杆顶端另外安装一个可拆式的滑轮伸出臂(见图4).在需要大转角改变下落方向时,安装该可拆滑车壁.在不需要使用时,拆下方便砍伐树木工作.该滑车臂由4个直径20 mm的螺栓固定在抱杆顶端,方便拆装.实物如图4所示.
5 成品试验,对比论证

图4 安装可拆式的滑车壁
使用该装置在通道处理工作中与原始砍伐树木方式进行对比.使用的两种方式合作的数据对比如下:
(1)综合性能的对比(见表2).

表2 综合性能对比表
(2)砍伐时间的对比:在太包1600线25#~26#、西硕4U13线25#~26#等通道处理工作展开对比.在传统作业中砍伐需要的时间见图5.
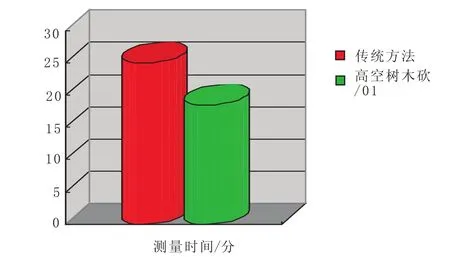
图5 安装可拆式的
在工作中,我们发现采用高空砍伐装置的砍伐作业,时间缩短了28%,大大节约了人力和时间成本.一年可在通道处理工作中的出车费和人工费节约20%.
6 结束语
该砍伐树梢装置的操作简单,减少了人员的工作时间,节约了成本,提高了工作的安全性.改变以往原始的树梢砍伐作业方式,使得作业人员在攀爬作业工作时提高了安全性和作业效率.有效控制了砍落树梢的速度和方向,从而保护了下落下方的建筑,线路免于被倒落的树梢砸伤,保证了输电线路外部施工作业的安全性,也增加了企业的社会效益.该装置在今后的推广使用中,其更大的经济、安全效益将会被显现出来.
[1]电力安全工作规程(线路部分)[S].北京:中国电力出版社,2009.
猜你喜欢
纺织科学研究(2021年1期)2021-03-19
学苑创造·A版(2021年12期)2021-01-04
小天使·一年级语数英综合(2020年11期)2020-12-16
散文诗(2018年22期)2018-11-15
意林(儿童绘本)(2018年10期)2018-11-08
小哥白尼(军事科学)(2018年7期)2018-09-10
小学生必读(低年级版)(2018年12期)2018-04-04
天天爱科学(2017年12期)2018-01-31
电线电缆(2017年4期)2017-07-25
文理导航·科普童话(2015年2期)2015-06-16
