海洋工程船推力分配策略
2013-03-08 06:42祝庆庆俞孟蕻卢佳佳
舰船科学技术 2013年5期
祝庆庆,俞孟蕻,卢佳佳,韦 华
(江苏科技大学电子信息学院,江苏镇江 212003)
海洋工程船推力分配策略
祝庆庆,俞孟蕻,卢佳佳,韦 华
(江苏科技大学电子信息学院,江苏镇江 212003)
阐述一种处理全回转推进器之间水动力干扰问题的方法。推力分配策略以能量消耗低、首向最优、推力误差小、最小化推进器最大推等为目标建立优化函数,综合考虑到推进器物理条件限制而设置动态推力区域,考虑到全回转推进之间水动力干扰而采用在推力禁区内限制推进器最大推力的方法。最后使用序列二次规划解决以上问题。仿真结果表明,限制推进器禁区内最大推力的方法降低了能量消耗,减少了推进器机械磨损,对于推力分配策略选取是一种合理有效的选择。
推力分配;水动力干扰;序列二次规划;推力禁区
0 引言
推力分配是动力定位系统的一个重要组成部分,其通过某种分配逻辑来控制自身推进器产生的力和力矩,来抗衡作用于船上的外界干扰力和干扰力矩,使船舶保持航行或定位且满足首向、航速、航迹及精度等要求。推力分配策略研究一般分为以下2个部分:
1)建立合适的优化目标函数及约束条件,此过程中应满足船舶定位精度、首向最优、能耗低等要求,同时要找到解决推进器物理条件限制、避免奇异结构等问题的方法,并找出一个合适的优化算法解决上述问题[1];
2)考虑推进器与船体之间及推进器之间的水动力干扰问题。
全回转推进器之间的水动力干扰是难以避免的,水动力干扰造成了较大的能量损失,针对此问题Johansen,Christiaan 和吴显法等[2~4]提出设置推力禁区的方法以降低能耗,其中吴显法以接受推力衰减、设置推进禁区及推进器在禁区出现时,控制系统将其控制在禁区外面,并产生推力这3种方法优劣加以详细对比[5]。本文在此基础上提出另外一种方法即在推力禁区内限制推进器最大推力并和设置推力禁区方法进行比较。
1 优化目标函数及约束条件
根据海洋工程船舶定位要求,推力分配的目标
函数及约束条件有以下几点要求:① 能源消耗少;②首向最优;③设置动态推力区域,减少推进器机械磨损;④最小化推进器最大推力,避免2个主推进器的推力值相差过大。由以上几点得到推力分配优化目标函数为

优化目标函数中的第1项用于计算推进器能量消耗,其权值取值取决于推力和功率之间的关系;第2项中引入松弛变量s= [ sx,sy,sMz]Τ,即在纵荡、横荡、首摇3个自由度上的误差,主要保证分配算法不能满足控制器输入推力指令的情况下,也能得到1组最优解,其可行解中s的期望值为0,所以权值矩阵Q>0,其值选取要足够大,以保证无论何时都满足s≈0,以使推力分配输出误差较小;第3项及约束式中第2项是设置动态推力区域,M矩阵是推进器在X方向产生推力的权值矩阵,YK,0是上一时刻推力分配在Y方向输出值,通过改变系数ε来限制下一时刻在Y方向取值;第4项最小化推进器最大推力,同时避免推进器之间的推力值相差过大。约束条件中第1项τ=[Fx,Fy,Mz]Τ是控制器输入指令,第3项为推进器推力特性区域限制。上述参数数值选取应根据工程船不同定位要求及侧重选取。
2 数值算例
2.1 坐标系设定
本文以某布缆船为模型算例,以其常规定位作业要求建立优化目标函数及约束条件。其船舶坐标系及推进器布置如图1所示。

图1 某布缆船坐标系及推进器布置Fig.1 The coordinate system and actuator layout of a cable laying ship

表1 推进器坐标值及参数Tab.1 Thruster coordinates and parameters
2.2 推力禁区处理
对于推力分配问题,推进器之间的水动力干扰是必须考虑的,干扰直接因素来源于螺旋桨产生的尾流。螺旋桨尾流的影响大多存在于2个螺旋桨前后布置时的情况。此时,上游螺旋桨的尾流会使下游螺旋桨入流速度增大,造成下游螺旋桨推力减小,螺旋桨的尾流在平板下会贴着平板迅速扩散,尾流中心偏向平板方向,偏离了桨轴中心,当附近的平板出现曲面时,尾流方向就会变得沿着曲面,产生的压力与推力反向,这就是所谓柯安达效应 (Coanda effect)。本文提出以下2种方法来避免推力损失过大并增加船舶动力定位能力:
方法一:设置推力禁区。
全回转推进器的推力禁区是将圆形推力特性区域除去一部分,在推力分配寻优的过程中推力可行域内不包括推力禁区,这样就可以限制推力分配的最优解进入推力禁区,从而避免推进器之间的水动力干扰[6]。推力禁区数学表达式如下:

式中α1和α2按照坐标系顺时针方向,如图2(b)所示,图中白色区域表示推进器推力特性区域中除去的推力禁区部分。
推力禁区范围一般来说是通过推进器衰减系数图以确定的,若无相关资料,推力禁区界限角可以通过下式确定:

式中:α为推力禁区界限,(°);L为2个推进器之间距离,m;D为上游推进器直径。
此种方法适用于两推进容器距离较近情况。
方法二:限制推进器禁区内最大推力。
尾流是造成推力减额主要因素,当在推力禁区内限制推进器最大推力时,可以减小尾流流速,若尾流对下游推进器影响可以忽略时,可避免设置推力禁区,如图2(c)所示。通过限制推进器最大推力以增强动力定位能力,其限制推力特性区域数学表达式如下:

式中:T<Tmax,Tmax为全回转推进器产生的最大推力。
此种方法对于2个推进器之间距离较远的情况时效果最为明显。

图2 全回转推进器推力禁区及其成因示意图Fig.2 Thrust forbidden zone of an azimuth thruster and schematic of its cause
3 数值仿真
3.1 参数选取
仿真实验针对上述2种方法分别进行,仿真参数选取如下:

3.2 仿真结果
1)方法一:设置推力禁区
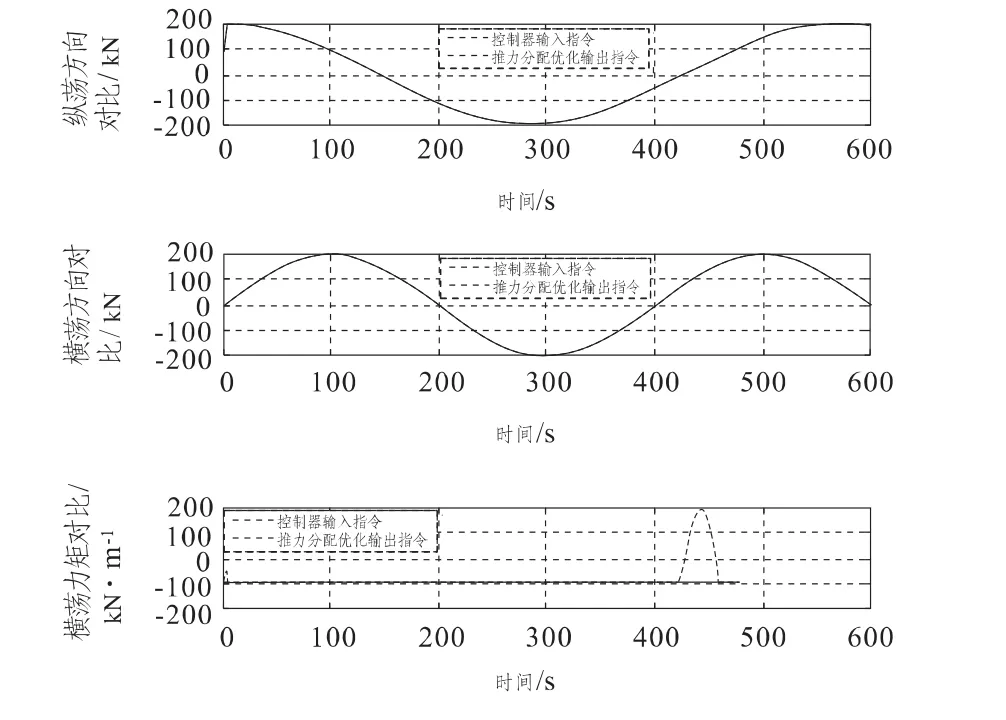
图3 设置推力禁区时在3个自由度上控制器输出与优化分配输出指令曲线Fig.3 Controller and optimal thrust allocation output in three degrees of freedom when set the thrust forbidden zone
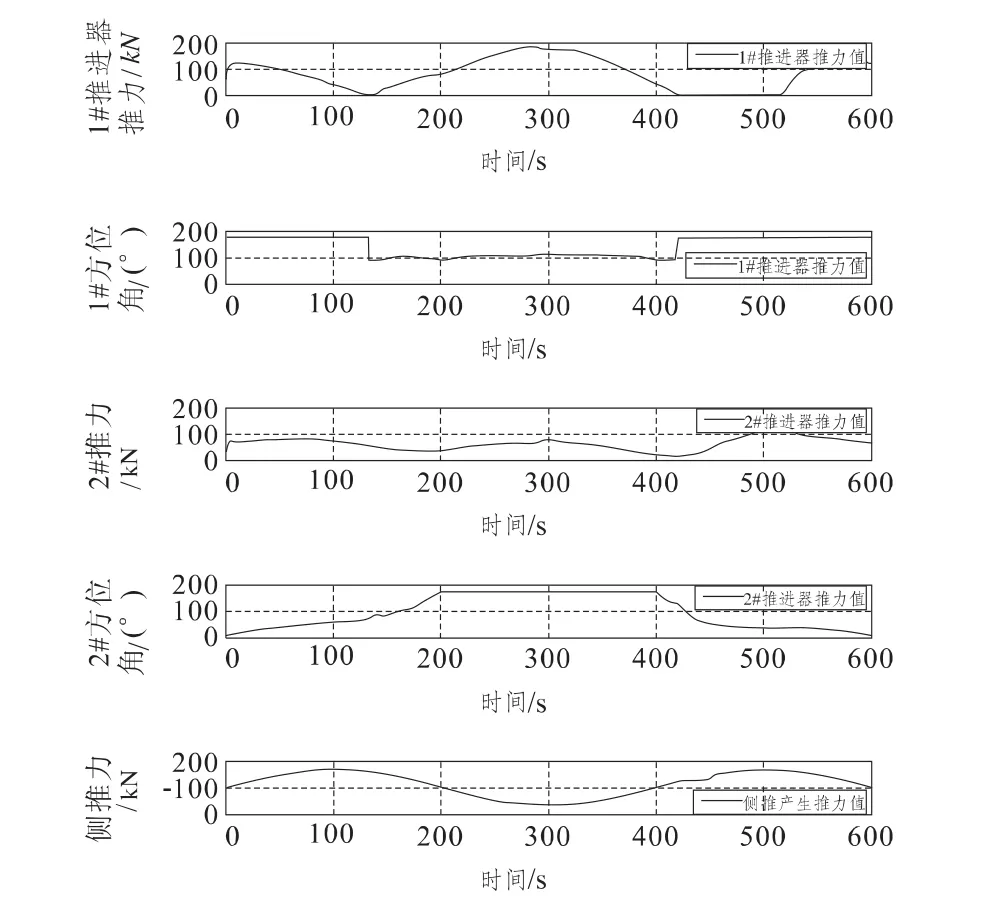
图4 设置推力禁区时推进器推力分配优化输出指令Fig.4 Optimal thrust allocation output of the thruster when set the thrust forbidden zone
2)方法二:限制推进器在禁区内最大推力
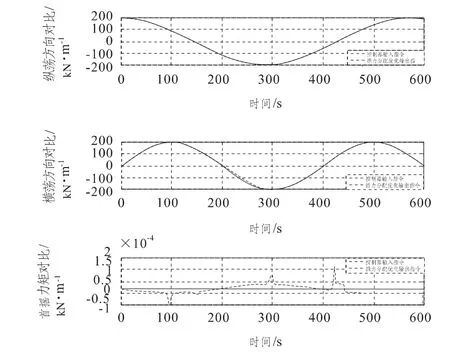
图5 限制最大推力时在3个自由度上控制器输出与优化分配输出指令曲线Fig.5 Controller and optimal thrust allocation output in three degrees of freedom when limit themaximum thrust
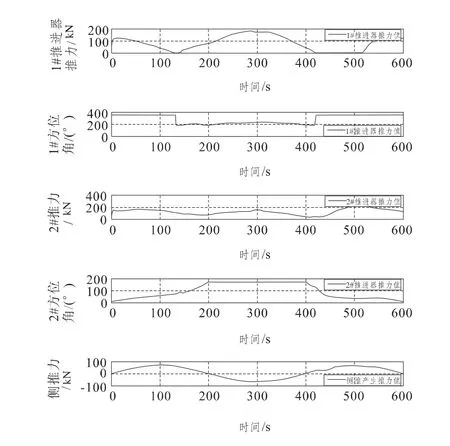
图6 限制最大推力时推进器推力分配优化输出指令Fig.6 Optimal thrust allocation output of the thruster when limit themaximum thrust
由图3和图5可以看出,2种方法都在推力分配优化输出和控制器输入数值在纵荡、横荡和首摇方向基本吻合,误差较小,满足了控制器输入要求。
由图4和图6对比可以看出,采用方法一时,全回转推进器避开了推力禁区,但1#全回转推进器方位角变化波动较大;采用方法二时,1#全回转推进器在时间为130 s和425 s左右通过了推力禁区,其产生最大推力T≤50 kN,且其推力输出指令、方位角变化平缓,减少了推进器机械磨损。
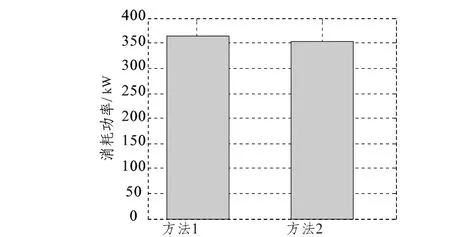
图7 2种方法消耗功率对比Fig.7 The power consumption comparison between twomethods
由图7可以看出,2种方法消耗总功率相差不大,但方法二在一定程度上降低了能源损耗。
4 结语
由仿真结果可以看出,在解决全回转推进器之间水动力干扰问题上,采用在推力禁区内限制推进器最大推力这种方法,使得推进器方位角变化更平缓,功率消耗更低,对于推力分配策略选取是一种更加合理有效选择。
[1]YANGShi-zhi,WANG Lei,ZHANGShen.Optimal thrustallocation based on fuel-efficiency for dynamic positioning system[J].Journal of Ship Mechanics.2011,15(3):217-226.
[2]SØRDALEN O J.Optimal thrust allocation formarine vessels[J].Control Engineering Practice,1997,5(9):1223-1231.
[3]JOHANSEN T A,FUGLSETH T P,TØNDEL P,et al.Optimal constrained control allocation in marine surface vessels with rudders[J].Control Engineering Practice,2008(6):444-464.
[4]JOHANSEN T A,FOSSEN T I,BERGE S P.Constrained nonlinear control allocation with singularity avoidance using sequential quadratic programming[J].IEEE Transactions on Control Systems Technology,2004(12):211-216.
[5]吴显法,王言英.动力定位系统的推力分配策略研究[J].船海工程,2008,37(3):92-216.
WU Xian-fa,WANG Yan-ying.Design of the thrust allocation for the dynamic positioning system[J].Ship &Ocean Engineering,2008,37(3):92-216.
[6]CHRISTIAAN D W.Optimal thrust allocation methods for dynamic positioning of ships[D].Delft University of Technology,2009.
Research on thrust allocation strategy for ocean engineering vehicles
ZHU Qing-qing,YU Meng-hong,LU Jia-jia,WEIHua
(School of Electronics and Information,Jiangsu University of Science and Technology,Zhenjiang 212003,China)
This paper described how to deal with the hydrodynamic interactions between azimuth thrusters.The objective of the optimal thrust allocation is less energy consumption,heading keeping,less thrust error,minimize largest thrust force,etc.Taking into account the physical conditions of the thruster set up the dynamic thrust region,the hydrodynamic interactions between azimuth thrusters are also taking into account and proposed to limit the max thrust in the forbidden zone.Finally,using the sequential quadratic programming method to solve above problems.The simulation results show that:this approach reduces energy consumption and themechanicalwear of the thruster.it's a reasonable and effective choice for the thrust allocation strategy.
thrust allocation;hydrodynamic interaction;sequential quadratic programming(SQP);thrust forbidden zone
U674.92
A
1672-7649(2013)05-0021-04
10.3404/j.issn.1672-7649.2013.05.005
2012-08-22;
2012-09-10
江苏省科技厅科技支撑计划资助项目(BE2011149)
祝庆庆(1984-),男,硕士研究生,研究方向为动力海洋工程船动力定位系统推力分配及控位能力。
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
小学生学习指导(高年级)(2022年5期)2022-06-02
小学生学习指导(中年级)(2022年5期)2022-06-01
小学生学习指导(低年级)(2022年5期)2022-05-31
舰船电子工程(2021年6期)2021-06-28
科学与财富(2021年33期)2021-05-10
舰船科学技术(2021年12期)2021-03-29
当代陕西(2018年12期)2018-08-04
雷达学报(2017年6期)2017-03-26
海外星云(2016年7期)2016-12-01