LiDAR 点的精度检验
2013-03-06 02:12:09欧阳平
城市勘测 2013年4期
欧阳平
(1.漳州市测绘设计研究院,福建漳州 363000; 2.福建省漳州市城乡规划局,福建漳州 363000)
LiDAR 点的精度检验
欧阳平1,2∗
(1.漳州市测绘设计研究院,福建漳州 363000; 2.福建省漳州市城乡规划局,福建漳州 363000)
LiDAR机载激光扫描测高或激光雷达(LiDAR)是一种安装在飞机上的机载激光探测和测距系统,可以量测地面物体的三维坐标,在三维地理空间信息的数据采集方面有广阔的发展前景和应用需求。本文介绍了LiDAR测量技术的优越性及其应用,提出了LiDAR点精度的检验方法,并运用实例对加拿大OPTECH公司的ALTM3100系统的Li-DAR点的高程、平面精度进行内符合、外符合检验,并提出了提高LiDAR点精度的方法。
激光雷达;4D产品;精度检验
1 前 言
LiDAR即Light Detection And Ranging,也叫机载激光扫描测高或激光雷达,是一种安装在飞机上的机载激光探测和测距系统,可以量测地面物体的三维坐标。Li-DAR数据经过相关软件数据处理后,可以生成高精度的数字高程模型(DEM)、等高线图及正射影像图(DOM)。机载激光雷达技术的商业化应用,使航测制图如生成DEM、等高线和地物要素的自动提取更加便捷,其地面数据通过软件处理很容易合并到各种数字图中。
LiDAR技术发展历史虽然不长,但是引起了人们的广泛关注和应用,成为国际研究开发的热点技术之一。同其他遥感技术相比,LiDAR技术具有自身的优越性,主要表现在以下几个方面[1]:
(1)LiDAR系统是一种主动式测量系统,不受天气、云雾的影响。
(2)激光脉冲信号能部分穿透植被,能快速、高精度和高空间分辨率地绘制林区或山区的真实地形图,只要植被不会太密足以保证激光信号能够到达地面并被反射回去。
(3)无需大量地面控制点,且速度快,半天就能完成1 000 km2区域面积大小的地形数据采集[2]。
(4)作业安全,它能进行危险地区(如沼泽地带、大型垃圾场)和无法布设控制点的地区的测图工作。
(5)作业周期短,易于更新。
(6)实效性强,24 h内就可以提取测区的DEM数据。
(7)将信息获取、处理及应用技术纳入同一系统中,更有利于提高自动化和高速化程度。
2 LiDAR主要应用领域
LiDAR系统可以为城市、地理、资源、生态、环境、人口、经济、社会等领域提供服务,特别是国土资源、城市规划、环境保护、公共安全等部门,充分利用由LiDAR系统参与建立的城市数字信息系统实现办公自动化和决策科学化。目前主要包括以下几个方面的应用[3]。
(1)测制带状目标地形图;
(2)环境监测、灾害调查;
(3)海岸地区测绘;
(4)森林地区DEM的获取、推求森林垂直结构;
(5)城市三维建模。
LiDAR利用激光传感器对地面进行扫描,同时利用IMU(惯性导航系统)实时定位飞机姿态(250 Hz),再加上GPS(全球定位系统)观测坐标(采样间隔为1 s),还可以打开LiDAR携带的数码相机进行航空摄影获取相片数据,可用于快速获取大面积三维地形数据,快速生成城市地区的数字表面模型(DSM),进行地物自动提取,由DTM生成数字高程模型(DEM),结合数码影像生成数字正摄影像(DOM),也可构建立体模型绘制数字线划图(DLG),在数字城市中获取大范围高精度的4D产品(如图1~图4所示),为城市三维建模提供基础数据。

图1 DSM
图2 DEM

图3 南通狼山地区DEM(部分)
图4 南通狼山地区DOM(部分)
3 LiDAR点精度及检验
3.1 标称精度
由于不同的生产厂家对各自的系统所标称的精度千差万别[3],例如,徕卡公司的ALS50标称精度为:平面<1 m,高程6 cm~10 cm(航高4 000 m);加拿大OPTECH公司的ALTM3100的标称精度为:平面1/3000×航高,高程<0.35 m(航高3 000 m)[3]。
实际生产中要对某一具体型号的LiDAR系统,选取某些特殊地形的场地进行精度验证。
3.2 高程精度检验方法
目前经常使用的高程检校办法是找一小块水平的平地作为检校场,这个面上的高程应该相等。然后利用激光雷达对检校场进行实地飞行,取地面的实际高程作为真实高度,然后用每个激光点的实际观测值与真实值求差值,就可以获得每个激光点的观测值误差和中误差。
3.3 平面精度检验方法
由于机载激光的观测不能完全按照要求在地物特征点上采样,也就是说,给定一个激光脚点很难同真实场景中的地物点匹配起来。为此通常是选取规则房屋的房角或屋脊,输电线等点状或线状地物来进行。为了尽量在扫描过程中能采集到这些点状或线状地物的特征点,在作业过程中要保证足够的数据密度。然后将激光点和影像定位,判读落在特征点上的脚点,在实地量测其精度,即可统计出激光LiDAR点的平面精度[3]。
3.4 工程实例
数据采集时间:2006年7月;仪器:ALTM-3100;航摄高度:3 500 m;
LiDAR设计参数:脉冲频率:70 kHz,扫描频率: 32 Hz,扫描角度:20°,旁向重叠:40%,地面点间距: 0.8 m,激光类型:窄激光。
(1)高程内符合精度检验
取激光点地面的平均高程作为真值,然后用每个激光点的实际观测值与真值求差值,获得每个激光点的观测值误差和中误差。
根据实际情况选取A1、A2两个区域进行激光点的高程内符合精度检验,检查区域影像如图5所示,对应激光脚点分布图如图6所示。
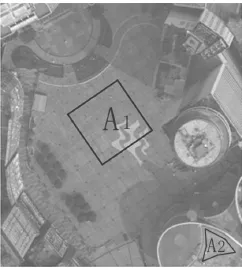
图5 A1、A2影像图

图6 A1、A2激光脚点分布图
①单航线,无重叠区域,图5、图6所示A1区域
A1区域:面积约1 967.5 m2,激光点3 200个点,点间距0.68 m。

A1区域高程内符合精度统计表 表1
②两条航线重叠区域,图5、图6所示A2区域
A2区域(东北、西南两条LiDAR航线重叠区域):面积约249 m2,激光点1 352个点,单航线点间距0.68 m。

A2区域高程内符合精度统计表 表2
从表1、表2的统计结果来看,激光点的高程内符合与仪器标称精度(高程<0.35 m航高3 000 m)基本一致。
(2)外符合精度检验
从内符合精度检验来看,在平坦地区LiDAR点的高程精度是符合其标称精度的,鉴于通过内符合精度检验无法确定不平坦区域的高程精度,故采用实地检查的方法来检查LiDAR点在不平坦地区的高程精度,同样可用实地检查的方法来检查LiDAR点的平面精度。
本例中利用Trimble RTK系统对与(1)中同航带的LiDAR点进行野外外符合精度检验。
RTK使用仪器为Trimble 5700标称平面精度为(±5+1ppm×D)mm,观测采用1+2的观测模式(一台基准站,两台流动站),为保证RTK的准确度和控制点的可靠性,在架设好基准站后,利用RTK对已知控制点进行检核,并用两台流动站分别在同一位置测量,以进行互相比较检核,结果表明RTK成果与静态成果相差不大(平面9.5 mm,高程7 mm);两台RTK流动站测同一点的坐标成果基本一致,由此可见,基准站数据成果可靠,RTK流动站工作正常,可信度高。
①高程外符合精度检验:采取在道路中线、比较宽阔的地方测得部分高程点。通过搜索每个实测点周围5 m范围内的LiDAR点,再由这些LiDAR点坐标通过线性内插的方式计算出测点处的LiDAR点高程,并与实测的高程进行比较。共选择了49个检核样本,Li-DAR点高程误差分布区间见表3,高程误差分布直方图如图7所示。
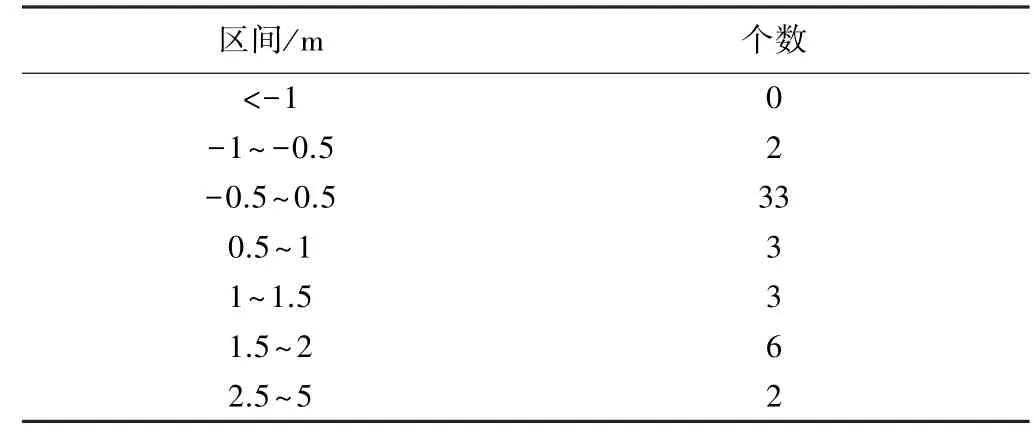
LiDAR点高程误差分布区间表 表3
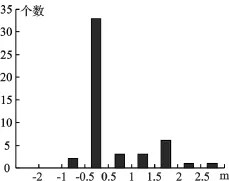
图7 高程误差分布直方图
从误差的分布范围来看,LiDAR点高程误差分布在-1 m~3 m的范围内:其中33个分布在-0.5m~-0.5m范围内,占检测样本的67%;6个分布在0.5m~1.5m范围内,占检测样本的12%;6个分布在1.5m~2m范围内,占检测样本的12%;两个大于2 m,占检测样本的4%;2个小于-0.5 m,占检测样本的4%。
从检核点的分布区域看,误差较大的检核点(大于1 m)共11个,其中有7个分布在山脊(谷)上。且“-”误差有只有7个,而“+”有误差42个。
在选取的49个LiDAR点高程样本中:有12个分布在比较宽阔平坦的地方,检核点差值绝对值平均为0.286 m,只有一个点的差值绝对值>1 m,若去除该检核点,则剩余检核点的差值绝对值平均为0.205 m;22个分布在路面上及其他较平坦的地区,检核点差值绝对值的平均为0.526 m,有三个检核点的差值绝对值>1 m,若去除这三个点则剩余19个检核点的差值绝对值的平均为0.291 m;15个分布在地形变化较大的区域,检核点差值绝对值的平均为1.087 m,其中7个检核点的差值绝对值>1 m,5个检核点的差值绝对值>1.5 m。
可以看出:LiDAR点的误差大部分分布在-0.5m~0.5m的范围内,LiDAR点的高程在平坦地区精度能达到0.205 m,在较平坦的地区的精度能达到0.291 m,但在地形变化较大的地方的精度只有1.087 m,且存在一定的系统误差。检核点绝对值的平均误差为0.639 m;若去除误差≥1 m的检核点(11个),用剩余的38个样本计算检核点误差绝对值的平均为0.305 m,与仪器标称精度(3 500 m飞行高度,≤35 cm)相符。
②LiDAR点的平面外符合精度检核
3.3 节所述的LiDAR点的平面精度检验方法在实际中很难操作,本文通过LiDAR点高程与实测高程的联系来检查LiDAR点的平面外符合精度。
通过搜索实测点周围5 m范围内的LiDAR点,再由这些LiDAR点坐标通过线性内插的方式计算出测点处的LiDAR点高程,再比较内插的高程和LiDAR点的高程,将差值最小的LiDAR点的平面坐标作为实测点处的LiDAR点平面坐标,再与实测坐标进行对比,并分析X方向和Y方向上误差分布,结果见表4,共选取了58个检测样本。
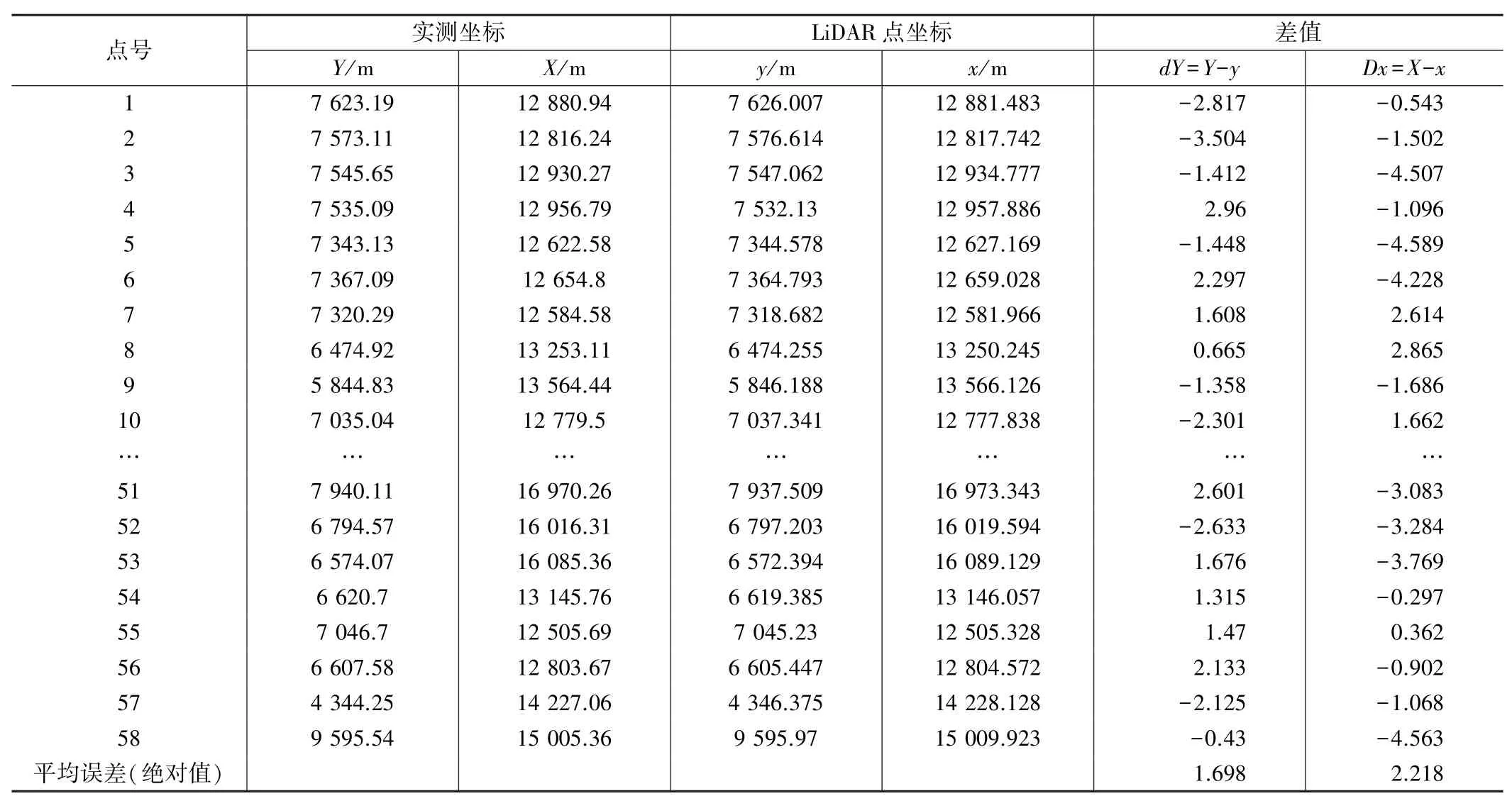
实测LiDAR点坐标与对应LiDAR点坐标比较 表4
4 结 论
通过以上分析可知:ALTM3100激光雷达的高程精度无论是内符合精度还是外符合精度都是符合其标称精度的,但是其平面精度由于检测方法限制,仍不能很好地检测其平面精度,按照3.3的检测方法可知,实际的平面精度要远低于标称精度。
LiDAR数据的精度与诸多因素有关,主要有如下三方面:
(1)硬件
LiDAR系统测量是测距-成像组合扫描仪在获取地面点的图像和激光测距数据的同时向GPS和姿态测量装置发出一个同步脉冲信号,分别由GPS、姿态测量装置、激光测距仪进行而这三者测量中都不可避免地带有一定的误差[6],从而导致LIDAR系统测量三维定位结果带有误差。由硬件部分产生的误差主要有GPS定位误差、测距误差、姿态误差、扫描角度误差等。影响机载激光对地定位精度的各因素中,影响最大的是GPS定位精度,如果能优化飞行作业,并提高GPS的定位精度,在正常情况下垂直方向精度都能达到7 cm~8 cm的水平[5]。
(2)软件
目前的LIDAR系统激光点数据处理并没有一个统一的规范,各个厂家推出各自的数据处理软件,其数据处理的依据、流程,算法也不为外界所知,同样的数据采用不同的软件处理可能就有系统误差;另外激光点由WGS84坐标向当地坐标系转化以及垂线偏差的存在都给最后的三维定位带来误差。
(3)被探测的物体
被探测的物体材质不同、探测时接触的反射面的角度不同都会直接影响到激光点的反射强度及测量精度。
目前,激光测高绝对精度可达15 cm;相对精度能达到5 cm;平面位置的绝对精度主要取决于飞行高度(平面位置精度约为飞行高度的1/1000)等参数,通常为dm级到m级的精度[6],随着人们认识的不断加深,如果采取一定的模型或方法去模拟或削弱这些误差的影响,其精度指标还有望得到进一步提高。
[1] 刘艳华.机载激光扫描侧高数据的应用与试验[D].太原理工大学硕士论文,2006.
[2] 刘燕京.关于新一代激光雷达系统[M].测绘科学,2003(3).
[3] 张小红.机载激光雷达测量技术理论与方法[M].武汉:武汉大学出版社,2007.
[4] 王永平.机载LiDAR数据处理及林业三维信息提取研究[D].中国测绘科学研究院硕士论文,2006.
[5] 尤红建.激光三维遥感数据处理及建筑物重建[M].北京:测绘出版社,2006.
[6] 刘经南,张小红,李征航.影响机载激光扫描测高精度的系统误差分析[M].武汉大学学报—信息科学版,2002,27(2):111~117.
Precision Analysis of LIDAR Points
Ou Yangping
(Zhangzhou Institute of Surveying and Mapping,Urban Planning Buruan of Zhangzhou,Zhangzhou 363000,China)
LiDAR(Light Detection And Ranging)is an airborne laser detection and ranging system,using the device you canmeasure the three-dimensional coordinates of ground objects,with higher-performance equipments,ithas technically superiority in collecting three-dimensional geospatial informationprospects.This paper introduces the superiority of the LiDAR measurement technology and its applications,put forward themethod to check-up the precision of the laser points,take for example the Canada OPTECH ALTM3100,inspects its elevation and plane accuracy of the laser points,and put forwardamethod to improve the accuracy of the laser points.
light detection and ranging;DSM,DEM,DOM,DLG;check-up the precision
1672-8262(2013)04-122-05
P237
B
2012—10—12
欧阳平(1978—),男,工程师,主要从事测绘生产科研工作。
猜你喜欢
幼儿教育·教育教学版(2023年2期)2023-06-23 11:18:58
北京测绘(2022年5期)2022-11-22 06:57:43
汽车观察(2021年8期)2021-09-01 10:12:41
装饰装修天地(2020年7期)2020-06-01 18:43:59
中国交通信息化(2019年1期)2019-03-26 06:43:46
电子制作(2018年16期)2018-09-26 03:27:00
中国纤检(2016年10期)2016-12-13 18:04:20
工业设计(2016年7期)2016-05-04 04:01:15
新校长(2016年8期)2016-01-10 06:43:49
凤凰资讯报(2014年36期)2014-04-29 16:02:02